Veovõlli tasakaalustamine: põhjalik juhend
Devices for Dynamic Balancing of Driveshafts and Measurement System for Balancing Machines Balanset-4A – €6,803
Kujutage ette, et juhite veoautot ja tunnete järsku teravat vibratsiooni või kuulete valju kolinat kiirendamisel või käiku vahetades. See on enamat kui lihtsalt ebameeldivus – see võib viidata tasakaalustamata kardaanvõllile. Inseneride ja tehnikute jaoks viitavad sellised vibratsioonid ja mürad efektiivsuse langusele, komponentide kiirenenud kulumisele ja potentsiaalselt kulukatele seisakutele, kui neid ei ravita.
Selles põhjalikus juhendis pakume praktilisi lahendusi kardaanvõlli tasakaalustamise probleemidele. Saate teada, mis on kardaanvõll ja miks see vajab tasakaalustamist, tunnete ära levinumad rikked, mis põhjustavad vibratsiooni või müra, ja järgite selget samm-sammult dünaamilise kardaanvõlli tasakaalustamise protsessi. Neid parimaid tavasid rakendades saate säästa remondikuludelt raha, vähendada tõrkeotsingu aega ja tagada, et teie masin või sõiduk töötab usaldusväärselt minimaalse vibratsiooniga.
Sisukord
- 1. Kardaanvõllide tüübid
- 2. Universaalliigendi ajami rikkeid
- 3. Kardaanvõlli tasakaalustamine
- 4. Kaasaegsed tasakaalustusmasinad ajamivõllide jaoks
- 5. Ettevalmistus ajamivõlli tasakaalustamiseks
- 6. Kardaanvõlli tasakaalustamise protseduur
- 7. Jäikade rootorite soovitatavad tasakaalustamise täpsusklassid
1. Kardaanvõllide tüübid
Kardaanajam (kardaanvõll) on mehhanism, mis edastab pöördemomenti võllide vahel, mille teljed lõikuvad kardaanliigendi keskpunktis ja võivad üksteise suhtes nurga all liikuda. Sõidukis edastab kardaanvõll pöördemomenti käigukastist (või vahekastist) veotelgedeni klassikalise või nelikveolise skeemi korral. Nelikveolistes sõidukites ühendab kardaanliigend tavaliselt käigukasti veovõlli vahekasti sisendvõlliga ning vahekasti väljundvõllid veotelgede peaülekannete sisendvõllidega.
Raamile paigaldatud seadmed (näiteks käigukast ja jaotuskast) saavad üksteise suhtes liikuda oma tugede ja raami enda deformatsiooni tõttu. Samal ajal on veoteljed raami külge kinnitatud vedrustuse kaudu ja saavad raami ja sellele paigaldatud seadmete suhtes liikuda vedrustuse elastsete elementide deformatsiooni tõttu. See liikumine võib muuta mitte ainult seadmeid ühendavate veovõllide nurki, vaid ka seadmete vahelist kaugust.
The universal joint drive has a significant disadvantage: the non-uniform rotation of the shafts. If one shaft rotates uniformly, the other does not, and this non-uniformity increases with the angle between the shafts. This limitation prevents the use of a universal joint drive in many applications, such as in the transmission of front-wheel-drive vehicles, where the main issue is transmitting torque to the turning wheels. This disadvantage can be partially compensated by using two universal joints on one shaft, set to equal joint angles (γ1 = γ2) with the yokes at both ends of the intermediate shaft in the same plane (in phase). Yokes phased 90° apart do not cancel the fluctuation — they add to it. However, in applications requiring uniform rotation, constant velocity joints (CV joints) are typically used instead. CV joints are a more advanced but also more complex design serving the same purpose.
Kardaanajamid võivad koosneda ühest või mitmest kardaanliigendist, mis on ühendatud ajamitelgede ja vaheseinte abil.

Joonis 1. Kardaanajami skeem: 1, 4, 6 - veovõllid; 2, 5 - kardaanliigendid; 3 - kompenseeriv ühendus; u1, u2 - võllide vahelised nurgad.
Üldiselt koosneb kardaanliigendi ajam kardaanliigenditest 2 ja 5, veovõllidest 1, 4 ja 6 ning kompenseerivast ühendusest 3. Mõnikord on veovõll paigaldatud sõiduki raami risttala külge kinnitatud vahetoele. Kardaanliigendid tagavad pöördemomendi ülekande võllide vahel, mille teljed ristuvad nurga all. Kardaanliigendid jagunevad mitteühtlase kiirusega ja püsikiirusega liigenditeks. Mitteühtlase kiirusega liigendid liigitatakse edasi elastseteks ja jäikadeks. Püsikiirusega liigendid võivad olla jagamissoontega kuulliigendid, jagamishoovaga kuulliigendid ja nukkliigendid. Need paigaldatakse tavaliselt juhtivate juhitavate rataste ajamisse, kus võllide vaheline nurk võib ulatuda 45°-ni ja kardaanliigendi kese peab kokku langema ratta pöörlemistelgede ja pöördetelje lõikepunktiga.
Elastic universal joints transmit torque between shafts with intersecting axes at an angle of 2...3° due to the elastic deformation of the connecting elements. A rigid non-uniform velocity joint transmits torque from one shaft to another through the movable connection of rigid parts. It consists of two yokes – 3 and 5, into the cylindrical holes of which the ends A, B, C, and D of the connecting element – the cross 4, are installed on bearings. The yokes are rigidly connected to shafts 1 and 2. Yoke 5 can rotate around axis B–D of the cross and at the same time, along with the cross, rotate around axis A–C, thereby enabling the transmission of rotation from one shaft to another with a changing angle between them.

Joonis 2. Jäiga ebaühtlase kiirusega universaalliigendi skeem
If shaft 1 rotates around its axis by an angle α, then shaft 2 will rotate by an angle β over the same period. The relationship between the rotation angles of shafts 1 and 2 is determined by the expression tanα = tanβ * cosγ, where γ is the angle at which the axes of the shafts are positioned. This expression indicates that the angle β is sometimes less than, equal to, or greater than angle α. Equality of these angles occurs every 90° of rotation of shaft 1. Therefore, with uniform rotation of shaft 1, the angular velocity of shaft 2 is non-uniform and varies according to a sinusoidal law. The non-uniformity of shaft 2's rotation becomes more significant as the angle γ between the shaft axes increases.
Kui võlli 2 ebaühtlane pöörlemine kantakse üle üksuste võllidele, tekivad ülekandes täiendavad pulseerivad koormused, mis suurenevad koos nurgaga γ. Et vältida võlli 2 ebaühtlase pöörlemise ülekandumist üksuste võllidele, kasutatakse universaalajamites kahte universaalliigendit. Need on paigaldatud nii, et nurgad γ1 ja γ2 on võrdsed; universaalliigeste kahvlid, mis on kinnitatud ebaühtlaselt pöörlevale võllile 4, peaksid asetsema samal tasandil.
Universaalliigendi ajamite põhiosade konstruktsioon on näidatud joonisel 3. Ebaühtlase kiirusega universaalliigend koosneb kahest hargist (1), mis on ühendatud ristiga (3). Ühel hargil on mõnikord äärik, teine aga keevitatud veovõlli toru külge või on sellel hargiga ots (6) (või hülss) veovõlliga ühendamiseks. Risti tihvtid on paigaldatud mõlema hargi aasadesse nõellaagritel (7). Iga laager on paigutatud korpusesse (2) ja kinnitatud hargi aasa korgiga, mis on hargi külge kinnitatud kahe poldiga, mis on lukustatud seibi sakkidega. Mõnel juhul on laagrid hargidesse kinnitatud lukustusrõngastega. Laagri määrde säilitamiseks ja selle kaitsmiseks vee ja mustuse eest on olemas kummist isepingulduv tihend. Risti sisemine õõnsus on täidetud määrdega läbi määrdenipli, mis jõuab laagriteni. Ristil on tavaliselt kaitseklapp, mis kaitseb tihendit kahjustuste eest, mis on tingitud risti pumbatava määrde rõhust. Hargiga ühendust (6) määritakse määrdenipli (5) abil.

Joonis 3. Jäiga ebaühtlase kiirusega universaalliigendi üksikasjad
The maximum angle between the axes of shafts connected by rigid non-uniform velocity universal joints usually does not exceed 20°, as efficiency significantly decreases at larger angles. If the angle between the shaft axes varies within 0...2°, the trunnions of the cross are deformed by the needle bearings, causing the universal joint to fail quickly.
Kiirete roomiksõidukite käigukastides kasutatakse sageli hammasratassiduri tüüpi universaalseid liigendeid, mis võimaldavad pöördemomendi ülekandmist võllide vahel, mille teljed ristuvad kuni 1,5...2° nurga all.
Ajovõllid valmistatakse tavaliselt torukujuliselt, kasutades spetsiaalseid terasest õmblusteta või keevitatud torusid. Kardaanühenduste jokid, spinnitud muhvid või otsad keevitatakse torude külge. Ajovõllile mõjuvate põikekoormuste vähendamiseks tehakse dünaamiline tasakaalustamine koos monteeritud kardaanliigenditega. Tasakaalustamatust korrigeeritakse, keevitades tasakaalustusplaadid veovõlli külge või mõnikord paigaldades tasakaalustusplaadid universaalliigendite laagrikorkide alla. Keermestatud ühendusdetailide suhteline asend pärast kardaanajami kokkupanekut ja tasakaalustamist tehases märgistatakse tavaliselt spetsiaalsete siltidega.
Kardaanajami kompenseeriv ühendus on tavaliselt valmistatud splain-liitmetena, mis võimaldab kardaanajami osade aksiaalset liikumist. See koosneb spinnitud otsast, mis sobitub universaalliigese ajami spinnitud muhviga. Määrde viiakse spinniühendusse määrdeühendusega või kantakse seda kokkupaneku ajal ja asendatakse pärast sõiduki pikemaajalist kasutamist. Tavaliselt paigaldatakse tihend ja kate, et vältida määrde lekkimist ja saastumist.
Pikkade veovõllide puhul kasutatakse üldjuhul universaallülitusajamites vahepealseid tugesid. Vahepealne tugi koosneb tavaliselt sõiduki raami risttala külge polditud klambrist, milles on kummist kummirõngasse paigaldatud kuullaager. Laager on mõlemalt poolt suletud korkidega ja sellel on määrimisseade. Elastne kummirõngas aitab kompenseerida paigaldamise ebatäpsusi ja laagri paigutusvead, mis võivad tekkida raami deformatsioonide tõttu.
Nõellaagritega kardaanliigend (joonis 4a) koosneb kahvlitest, ristist, nõellaagritest ja tihenditest. Nõellaagritega laagrikupud paigaldatakse risti tappidele ja tihendatakse tihenditega. Kupud kinnitatakse kahvlitesse seegerõngaste või kruvidega kinnitatud kaantega. Kardaanliigendeid määritakse ristis olevate sisekanalite kaudu määrdenipli abil. Liigse õlirõhu kõrvaldamiseks liigeses kasutatakse kaitseklappi. Vedava kahvli ühtlase pöörlemise ajal pöörleb veetav kahvel ebaühtlaselt: see kiireneb ja aeglustub vedava kahvli suhtes kaks korda ühe pöörde jooksul. Ebaühtlase pöörlemise kõrvaldamiseks ja inertsikoormuste vähendamiseks kasutatakse kahte kardaanliigendit.
Eesmiste veorataste ajamile on paigaldatud püsikiirusega kardaanliigendid. GAZ-66 ja ZIL-131 sõidukite konstantse kiirusega liigendajam koosneb juppidest 2, 5 (joonis 4b), neljast kuulist 7 ja keskmisest kuulist 8. Ajamijupp 2 on lahutamatult seotud sisemise teljevõlliga, samas kui ajamijupp on sepistatud koos välimise teljevõlliga, mille otsa on kinnitatud ratta telje rummu. Ajamomendi ülekandmine õlgelt 2 õlgele 5 toimub kuulide 7 kaudu, mis liiguvad mööda õlgades olevaid ringikujulisi soone. Keskne kuul 8 on keskel paiknevate juppide tsentreerimiseks ja seda hoiavad paigal tihvtid 3, 4. Juppide 2, 5 pöörlemissagedus on sama, kuna mehhanism on sümmeetriline juppide suhtes. Võlli pikkuse muutumine on tagatud jokkide ja võlli vabade hammasrataste ühendustega.

Joonis 4. Kardaanliigendid: a - kardaanliigend: 1 - kaas; 2 - laagrikupp; 3 - nõellaager; 4 - tihend; 5, 9 - kahvlid; 6 - kaitseklapp; 7 - rist; 8 - määrdenippel; 10 - kruvi; b - püsikiirusliigend: 1 - sisemine pooltelg; 2 - veokahvel; 3, 4 - tapppoldid; 5 - veetav kahvel; 6 - välimine pooltelg; 7 - kuulid; 8 - keskkuul.
2. Universaalliigendi ajami rikkeid
Rikked universaallülitusajamites ilmnevad tavaliselt universaallülituste teravate koputuste kujul, mis tekivad sõiduki liikumise ajal, eriti käiguvahetuste ja mootori väntvõlli pöörlemiskiiruse järsu suurenemise ajal (näiteks mootori pidurdamiselt kiirendamisele üleminekul). Universaalliigendi rikke märgiks võib olla selle kuumenemine kõrgele temperatuurile (üle 100 °C). See juhtub kardaanliigendi pukside ja tihvtide, nõelalaagrite, ristide ja hammasliidete märkimisväärse kulumise tõttu, mille tulemuseks on kardaanliigendi paigutusviga ja nõelalaagrite märkimisväärne löögi telgkoormus. Kardaanliigendi risti korktihendite kahjustused põhjustavad kandekonksu ja selle laagri kiire kulumise.
Hoolduse käigus kontrollitakse kardaanliigendi ajamit, pöörates käega järsult veovõlli mõlemas suunas. Võlli vaba pöörlemise ulatus määrab kindlaks kardaanliigendite ja hammasliitmike kulumise. Iga 8-10 tuhande kilomeetri järel kontrollitakse käigukasti veovõlli äärikute ja peajõuseadme ajamivõlli poltühenduste seisundit otsakeste kardaanliigendite äärikutega ning veovõlli vahetusmuhvi kinnitust. Samuti kontrollitakse hammasrattaühenduste kummist saapaid ja universaallülituse risti korktihendeid. Kõik kinnituspoldid peavad olema täielikult pingutatud (pingutusmoment 8-10 kgf-m).
Kardaanühenduste nõelalaagreid määritakse vedela õliga, mida kasutatakse jõuülekandeüksuste puhul; enamiku sõidukite hammasliiteid määritakse määrdedega (US-1, US-2, 1-13 jne.); nõelalaagrite määrimine määrdeainega on rangelt keelatud. Mõnes sõidukis on hammasliitmikud määritud ülekandeõliga. Vahepealne tugilaager, mis on paigaldatud kummist muhvi, ei vaja praktiliselt määrimist, kuna see määritakse tehases kokkupaneku ajal. ZIL-130 sõiduki tugilaagrit määritakse regulaarse hoolduse käigus (iga 1100-1700 km järel) rõhuühendusega määrdeainega.

Joonis 5. Kardaanajam: 1 - äärik kardaanvõlli kinnitamiseks; 2 - kardaanliigendi rist; 3 - kardaanliigendi kahvel; 4 - liugkahvel; 5 - kardaanvõlli toru; 6 - suletud otsaga nõelrull-laager.
Kardaanajam koosneb kahest nõelalaagritega kardaanliigendist, mis on ühendatud õõnes võlli ja evoluutsete hammastega liuguriga. Et tagada usaldusväärne kaitse mustuse eest ja hammaslihviühenduse hea määrimine, on liugjupp (6), mis on ühendatud käigukasti sekundaarvõlliga (2), paigutatud käigukasti korpuse külge kinnitatud pikendusse (1). Lisaks suurendab selline splainelise ühenduse asukoht (väljaspool liitsõlmede vahelist tsooni) oluliselt universaalkäigukasti jäikust ja vähendab võlli vibratsiooni tõenäosust, kui libisev splaineline ühendus kulub ära.
Veovõll on valmistatud õhukeseinalisest elektrikeevitatud torust (8), millesse on mõlemast otsast pressitud kaks identset hargi (9) ja seejärel kaarkeevitusega kokku keevitatud. Risti (25) nõellaagri korpused (18) on pressitud harkide (9) aasadesse ja kinnitatud vedrukinnitusrõngastega (20). Iga universaalliigendi laager sisaldab 22 nõela (21). Ristide väljaulatuvatele pöördtappidele on pressitud stantsitud korgid (24), millesse on paigaldatud korgirõngad (23). Laagreid määritakse risti keskel olevasse keermestatud auku keeratud nurgelise määrdenipli (17) abil, mis on ühendatud risti pöördtappides olevate kanalitega. Universaalliigendi risti vastasküljel asub selle keskel kaitseklapp (16), mis on ette nähtud liigse määrde vabastamiseks risti ja laagrite täitmisel ning rõhu tekkimise vältimiseks risti sees töötamise ajal (klapp aktiveerub rõhul umbes 3,5 kg/cm²). Kaitseklapi lisamise vajadus tuleneb asjaolust, et liigne rõhu tõus risti sees võib põhjustada korgitihendite kahjustumist (väljasurumist).

Joonis 6. Kardaanvõlli koost: 1 - käigukasti pikendus; 2 - käigukasti sekundaarvõll; 3 ja 5 - poritõrjurid; 4 - kummitihendid; 6 - liugkahvel; 7 - tasakaalustusplaat; 8 - kardaanvõlli toru; 9 - kahvel; 10 - äärikkahvel; 11 - polt; 12 - tagatelje peaülekande äärik; 13 - vedruseib; 14 - mutter; 15 - tagatelg; 16 - kaitseklapp; 17 - nurkne määrdenippel; 18 - nõellaager; 19 - kahvli silm; 20 - vedruseeger; 21 - nõel; 22 - toroidaalse otsaga seib; 23 - korgirõngas; 24 - stantsitud kaas; 25 - rist.
Mõlema universaalliigendiga kokku pandud veovõll on mõlemast otsast hoolikalt dünaamiliselt tasakaalustatud, keevitades toru külge tasakaalustusplaadid (7). Seetõttu tuleb võlli lahtivõtmisel kõik selle osad hoolikalt märgistada, et neid saaks algsele kohale tagasi kokku panna. Selle juhise eiramine härib võlli tasakaalu, põhjustades vibratsioone, mis võivad kahjustada käigukasti ja sõiduki keret. Kui üksikud osad kuluvad, eriti kui toru löögi tõttu paindub ja võlli dünaamiline tasakaalustamine pärast kokkupanekut muutub võimatuks, tuleb kogu võll välja vahetada.
Võimalikud veovõlli talitlushäired, nende põhjused ja lahendused
| Tõrke põhjus | Lahendus |
|---|---|
| Ajovõlli vibratsioon | |
| 1. Takistusest tingitud võlli paindumine | 1. Sirgestage ja tasakaalustage kokku pandud võlli dünaamiliselt või vahetage kokku pandud võlli välja. |
| 2. Laagri ja ristkandmise kulumine | 2. Asendage laagrid ja ristid ning tasakaalustage kokku pandud võlli dünaamiliselt. |
| 3. Pikendushülsside ja liugjupi kulumine | 3. Asendage pikendus ja liugjupp ning tasakaalustage kokkupandud võll dünaamiliselt. |
| Koputused käivitamisel ja rannikulöögi ajal | |
| 1. Liuguri hammasrataste või sekundaarse käigukasti võlli kulumine | 1. Vahetage kulunud osad välja. Liugraua vahetamisel tasakaalustage kokkupandud võlli dünaamiliselt. |
| 2. Lahtised poldid, mis kinnitavad ääriku jupi tagatelje käigukasti ääriku külge. | 2. Pingutage poldid |
| Õli viskamine universaalliigendi tihenditest | |
| Korkrõngaste kulumine universaallülituste tihendites | Asendage korgirõngad, säilitades kokkupaneku ajal kõigi ajamivõlli osade suhtelise asendi. Kui ristid ja laagrid on kulunud, vahetage laagrid ja ristid välja ning tasakaalustage kokkupandud võlli dünaamiliselt. |
3. Kardaanvõlli tasakaalustamine
Pärast kardaanvõlli remonti ja kokkupanekut tasakaalustatakse see masinal dünaamiliselt. Üks tasakaalustusmasina konstruktsioon on näidatud joonisel 7. Masin koosneb plaadist (18) ja pendliraamist (8), mis on paigaldatud neljale vertikaalsele elastsele vardale (3), tagades selle võnkumise horisontaaltasandis. Pendliraami (8) pikitorudele on paigaldatud kronstein ja esipeatugi (9), mis on kinnitatud kronsteinile (4). Tagumine peatugi (6) asub liikuval traaversil (5), mis võimaldab eri pikkusega kardaanvõlle dünaamiliselt tasakaalustada. Peatugede spindlid on paigaldatud täppiskuullaagritele. Eespeatugi (9) spindlit käitab masina alusesse paigaldatud elektrimootor kiilrihmaülekande ja vahevõlli kaudu, millele on paigaldatud jaotuskettas (10). Lisaks on masina plaadile (18) paigaldatud kaks sissetõmmatavate lukustustappidega statiivi (15, 17), mis tagavad pendliraami esi- ja tagaotsa fikseerimise sõltuvalt kardaanvõlli esi- või tagaotsa tasakaalustamisest.

Joonis 7. Dünaamiline tasakaalustusmasin ajamivõllide jaoks
1-klamber; 2-damper; 3-elastiline varras; 4-käepide; 5-liigutatav traversaal; 6-taustaplaat; 7-ristvarras; 8-pendliraam; 9-esimene ajamiplaat; 10-kõõluseadme ketas; 11-milivoltmeeter; 12-kommutaator-korrektsioonivõlli haru; 13-magnetoelektriline andur; 14-fikseeritud statiiv; 15-fiksaatori statiiv; 16-tugi; 17-fiksaator; 18-tugiplaat.
Fikseeritud statiivid (14) on paigaldatud masinaplaadi tagaküljele ja neile on paigaldatud magnetoelektrilised andurid (13), mille vardad on ühendatud pendliraami otstega. Raami resonantsvibratsiooni vältimiseks on kronsteinide (4) alla paigaldatud õliga täidetud summutid (2).
During dynamic balancing, the driveshaft assembly with the sliding yoke is installed and secured on the machine. One end of the driveshaft is connected by a flange-yoke to the flange of the front driving headstock, and the other end by the support neck of the sliding yoke to the splined sleeve of the rear headstock. Then the ease of rotation of the driveshaft is checked, and one end of the machine's pendulum frame is fixed using the fixator. After starting the machine, the limb of the rectifier is rotated counterclockwise, bringing the millivoltmeter needle to its maximum reading. The millivoltmeter reading corresponds to the magnitude of the imbalance. The millivoltmeter scale is graduated in gram-centimeters or grams of counterweight. Continuing to rotate the rectifier limb counterclockwise, the millivoltmeter reading is brought to zero, and the machine is stopped. Based on the rectifier limb reading, the angular displacement (angle of imbalance displacement) is determined, and by manually rotating the driveshaft, this value is set on the intermediate shaft limb. The welding place of the balancing plate will be on the top of the driveshaft, and the weighted part at the bottom in the correction plane. Then the balancing plate is attached and tied with thin wire at a distance of 10 mm from the weld, the machine is started, and the balance of the driveshaft end with the plate is checked. The imbalance should be no more than 70 g·cm (700 g·mm). Then, releasing one end and securing the other end of the pendulum frame with the fixator stand, dynamic balancing of the other end of the driveshaft is performed according to the technological sequence described above.
Kardaanvõllidel on mõned tasakaalustamise iseärasused. Enamiku detailide puhul võetakse dünaamilisel tasakaalustamisel aluseks tugikaelad (nt elektrimootorite rootorid, turbiinid, spindlid, väntvõllid jne), kuid kardaanvõllide puhul on selleks äärikud. Kokkupaneku ajal tekivad eri ühendustes vältimatud lõtkud, mis põhjustavad tasakaalustamatust. Kui tasakaalustamise käigus ei ole võimalik saavutada minimaalset tasakaalustamatust, lükatakse võll tagasi.
- Vahe ajamivõlli ääriku maandumisrihma ja vasaku ja parema tugiotsakute kinnitusääriku sisemise augu vahelises ühenduses;
- ääriku aluspindade radiaal- ja otsakuti;
- Hinge- ja hammasliidete lüngad. Hammasliidete õõnsuses olev määrdeaine võib põhjustada "ujuvat" tasakaalustamatust. Kui see takistab vajaliku tasakaalustustäpsuse saavutamist, tasakaalustatakse veovõlli ilma määrdeaineta.
Mõned tasakaalustamatused võivad olla täiesti parandamatud. Kui ajamivõlli kardaanliigendites täheldatakse suurenenud hõõrdumist, suureneb korrigeerimistasandite vastastikune mõju. See toob kaasa tasakaalustamise jõudluse ja täpsuse vähenemise.
Vastavalt standardile OST 37.001.053-74 on kehtestatud järgmised tasakaalustamatuse standardid: kahe liigendiga (kahe toega) kardaanvõllid tasakaalustatakse dünaamiliselt ja kolme liigendiga (kolme toega) kardaanvõllid – kokkupanduna vahetoega; üle 5 kg kaaluvate kardaanvõllide ja haakeseadiste äärikud (haagid) tasakaalustatakse enne võlli või haakeseadise kokkupanekut staatiliselt; kolme liigendiga kardaanvõllide mõlemas otsas või vahetoel olevate kardaanvõllide jääktasakaalustamatuse norme hinnatakse eritasakaalustamatuse abil;
Võlli mõlemas otsas või vaheltbal, samuti kolmeliigendiga kardaanvõllide puhul tasakaalustusstendi mis tahes asendis ei tohiks maksimaalne lubatud jääktasakaalustamatuse norm ületada: sõiduautode ja väikeveokite (kuni 1 t) ning väga väikeste busside käigukastidel – 6 g-cm/kg, ülejäänud osadel – 10 g-cm/kg. Kardaanvõlli või kolmeliigendiga kardaanvõlli maksimaalne lubatud jääktasakaalustamatuse norm tasakaalustusstendil peaks olema tagatud pöörlemissagedusel, mis vastab nende sagedustele käigukastis sõiduki maksimaalsel kiirusel.
Note: OST 37.001.053-74 is a Soviet automotive-industry standard from 1974 and is quoted here as a historical reference. In modern terms, 6 g·cm/kg at 3,000 rpm corresponds to about G 19 and 10 g·cm/kg to about G 31 — the OST requirement sits between G 16 and G 40, consistent with the ISO 21940-11 (formerly ISO 1940-1) grades for drive shafts. Specify new work in ISO 21940-11 grades.
Veoautode, mille kandevõime on 4 t ja rohkem, väikeste ja suurte busside kardaanvõllide ja kolmeliigendiliste kardaanvõllide puhul on lubatud tasakaalustusstendil pöörlemissagedust vähendada ülekandevõllide pöörlemissageduse võrra 70%-ni sõiduki maksimaalsel kiirusel. Vastavalt standardile OST 37.001.053-74 peaks kardaanvõllide tasakaalustav pöörlemissagedus olema võrdne järgmisega:
nb = (0,7 ... 1,0) nr,
kus nb – tasakaalustav pöörlemissagedus (peaks vastama stendi peamistele tehnilistele andmetele, n=3000 min-1)-1); nr – maksimaalne tööpöörlemissagedus, min-1.
Tegelikkuses ei saa ajamivõlli tasakaalustada soovitatud pöörlemissageduse juures, kuna liigendites ja hammasliitmikes on vahe. Sellisel juhul valitakse teine pöörlemissagedus, millega see tasakaalustub.
4. Kaasaegsed tasakaalustusmasinad ajamivõllide jaoks

Joonis 8. Tasakaalustusmasin kuni 2 meetri pikkustele ja kuni 500 kg kaaluvatele ajamitelgedele
Mudelil on 2 statiivi ja see võimaldab tasakaalustamist 2 parandustasandil.

Joonis 9. Tasakaalustusmasin kuni 4200 mm pikkustele ja kuni 400 kg kaaluvatele ajamitelgedele
Mudelil on 4 statiivi ja see võimaldab tasakaalustamist korraga 4 korrigeerimistasandil.

Joonis 10. Horisontaalne kõva laagri tasakaalustusmasin ajamivõllide dünaamiliseks tasakaalustamiseks
1 – Balancing item (driveshaft); 2 – Machine base; 3 – Machine supports; 4 – Machine drive; The structural elements of the machine supports are shown in Figure 11.

Joonis 11. Masina tugielemendid ajamivõllide dünaamiliseks tasakaalustamiseks
1 - Vasakpoolne reguleerimata tugi; 2 - Vahepealne reguleeritav tugi (2 tk); 3 - Paremal asuv reguleerimata fikseeritud tugi; 4 - Tugiraami lukustuskäepide; 5 - Liikuv tugiplatvorm; 6 - Tugi vertikaalse reguleerimise mutter; 7 - Vertikaalasendi lukustuskäepidemed; 8 - Tugi klamber; 9 - Vahepealne laagri liikuv klamber; 10 - Klambri lukustuskäepide; 11 - Klambrilukk; 12 - Ajam (juhtiv) spindel toote paigaldamiseks; 13 - Ajamspindel.
5. Ettevalmistus ajamivõlli tasakaalustamiseks
Järgnevalt käsitleme masina tugede seadistamist ja tasakaalustava elemendi (nelja tugedega ajamivõlli) paigaldamist masina tugedele.

Joonis 12. Üleminekuflanšide paigaldamine tasakaalustusmasina spindlitele

Joonis 13. Ajovõlli paigaldamine tasakaalustusmasina tugedele

Joonis 14. Ajamivõlli nivelleerimine horisontaalselt tasakaalustusmasina tugipunktide peal, kasutades mullitasandit.

Joonis 15. Tasakaalustusmasina vahetugede kinnitamine, et vältida ajamivõlli vertikaalset nihkumist.
Pöörake eset käsitsi ühe täispöörde võrra. Veenduge, et see pöörleb vabalt ja ilma tugede külge takerdumata. Pärast seda on masina mehaaniline osa seadistatud ja eseme paigaldamine on lõpetatud.
6. Kardaanvõlli tasakaalustamise protseduur
Which kit do I need? A two-support machine correcting in two planes (Figure 8) needs the two-channel Balanset-1A. A four-support machine correcting in four planes simultaneously (Figure 9, and the procedure below) needs the four-channel Balanset-4A. The measurement and calculation workflow is identical; only the channel count differs. The procedure below is described for a four-plane setup, while the software screenshots show the same workflow on the two-plane Balanset-1A — on the Balanset-4A the same screens simply add planes 3 and 4.
The process of driveshaft balancing on the balancing machine will be considered using the Balanset-4A measuring system as an example. The Balanset-4A is a portable balancing kit designed for balancing in one, two, three, and four correction planes of rotors, either rotating in their own bearings or mounted on a balancing machine. The device includes up to four vibration sensors, a phase angle sensor, a four-channel measuring unit, and a portable computer.
The entire balancing process, including measurement, processing, and display of information on the magnitude and location of corrective weights, is performed automatically and does not require the user to have additional skills and knowledge beyond the provided instructions. The results of all balancing operations are saved in the Balancing Archive and can be printed as reports if necessary. In addition to balancing, the Balanset-4A can also be used as a regular vibro-tachometer, allowing measurement on four channels of the root mean square (RMS) value of total vibration, RMS of the rotational component of vibration, and control of rotor rotation frequency.
Lisaks võimaldab seade kuvada ajafunktsiooni ja vibratsioonispektri graafikuid vibratsioonikiiruse järgi, mis võivad olla kasulikud tasakaalustatud masina tehnilise seisundi hindamisel.

Figure 16. External View of the Balanset-4A Device for Use as a Measuring and Computing System of the Driveshaft Balancing Machine

Figure 17. Example of Using the Balanset-4A Device as a Measuring and Computing System of the Driveshaft Balancing Machine
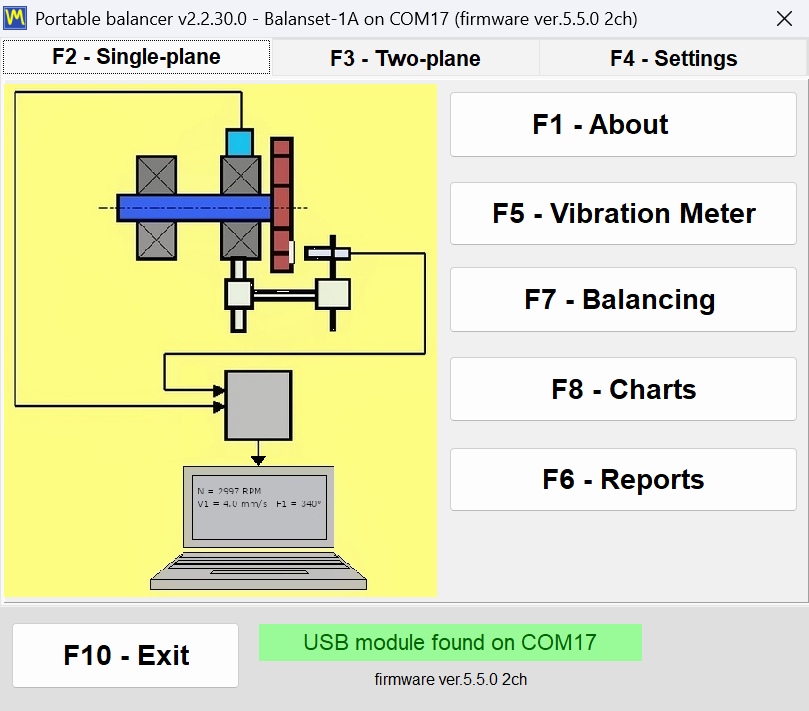
Figure 18. Main window of the Balanset software: F1 - About, F5 - Vibration Meter, F7 - Balancing, F8 - Charts, F6 - Reports
The Balanset-4A device is supplied with vibration sensors. The sensors are accelerometer-based; the software integrates their signal and displays vibration velocity in mm/s RMS.

Figure 19. Installation of Balanset-4A Vibration Sensors on the Supports of the Balancing Machine
The direction of the sensors' sensitivity axis should match the direction of the support's vibration displacement, in this case – horizontal. For additional information on sensor installation, see BALANCING ROTORS IN OPERATING CONDITIONS.
- Paigaldage vibratsiooniandurid 1, 2, 3, 4 tasakaalustusmasina tugedele.
- Ühendage vibratsiooniandurid pistikutesse X1, X2, X3, X4.
- Paigaldage faasinurkade andur (lasertahomeeter) 5 nii, et tasakaalustatud rootori radiaal- (või otsa-) pinna ja anduri korpuse vaheline nominaalne vahe oleks vahemikus 10-300 mm.
- Kinnitage rootori pinnale vähemalt 10-15 mm laiune helkurlindi märk.
- Ühendage faasinurkade andur pistikusse X5.
- Ühendage mõõtmisseade arvuti USB-porti.
- Kui kasutate võrguvoolu, ühendage arvuti toiteallikaga.
- Ühendage toiteplokk 220 V, 50 Hz võrku.
- Turn on the computer and start the Balanset software.
- Open the balancing workspace with the “F7 - Balancing” button and set the required number of correction planes in the “Plane count” field, so that vibration is measured simultaneously by the vibration sensors connected to the inputs of the measuring unit.
- A mnemonic diagram illustrating the connection of the sensors and the measuring unit appears on the computer display, as shown in Figure 18.
Enne tasakaalustamist on soovitatav teha mõõtmised vibromeetri režiimis (nupp F5).
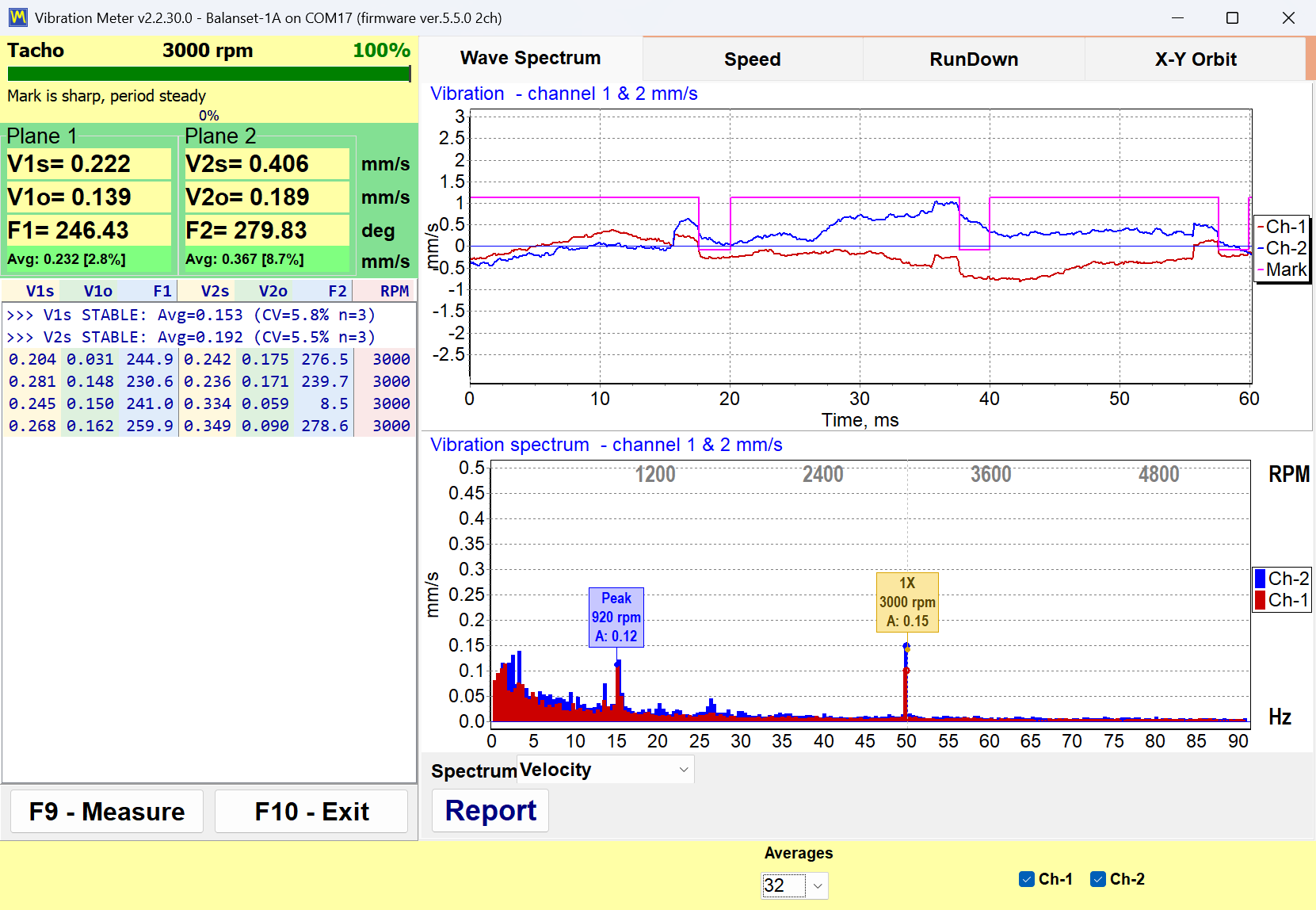
Figure 20. Vibration Meter mode (F5): total vibration V1s, V2s and rotational components V1o, V2o with phases F1, F2, displayed as vibration velocity in mm/s RMS
Kui kogu vibratsiooni suurusjärk V1s (V2s) vastab ligikaudu pöörlemiskomponendi suurusele V1o (V2o), võib eeldada, et mehhanismi vibratsiooni peamine põhjus on rootori tasakaalustamatus. Kui kogu vibratsiooni suurusjärk V1s (V2s) ületab oluliselt pöörlemiskomponenti V1o (V2o), on soovitatav mehhanismi kontrollida – kontrollida laagrite seisukorda, tagada kindel kinnitus vundamendile, veenduda, et rootor ei puutu pöörlemise ajal kokku statsionaarsete osadega, ning arvestada teiste mehhanismide vibratsioonide mõjuga jne.
Studying the time function graphs and vibration spectra in the charts mode (“F8 - Charts”, the “F5-Spectrum (Hz)” tab) can be useful here.

Joonis 21. Vibratsiooni ajafunktsiooni ja spektri graafikud
Graafik näitab, millistel sagedustel on vibratsioonitasemed kõrgeimad. Kui need sagedused erinevad tasakaalustatud mehhanismi rootori pöörlemissagedusest, on vaja enne tasakaalustamist tuvastada nende vibratsioonikomponentide allikad ja võtta meetmeid nende kõrvaldamiseks.
Reading the spectrum of a driveshaft: 1x is unbalance, 2x may be the joint itself. A dominant peak at the rotational frequency (1x) points to unbalance — this is what balancing removes. A dominant peak at twice the rotational frequency (2x), especially together with strong axial vibration, points to the joint angles, worn crosses or splines, or joondusviga: a universal (cardan) joint working at an angle γ makes the driven yoke lead and lag twice per revolution, so it produces a 2x component even when the shaft is perfectly balanced. Balancing will not remove it — equalise the joint angles (γ1 = γ2) and check the joints first. In the charts mode (“F8 - Charts”) the “F5-Spectrum (Hz)” tab shows the spectrum and the “F3-1x vibration” tab the rotational component; at 3000 min-1 1x = 50 Hz and 2x = 100 Hz.
Samuti on oluline pöörata tähelepanu näitude stabiilsusele vibromeetri režiimis - vibratsiooni amplituud ja faas ei tohiks mõõtmise ajal muutuda rohkem kui 10-15% võrra. Vastasel juhul võib mehhanism töötada resonantspiirkonna lähedal. Sellisel juhul tuleks rootori kiirust reguleerida.
When performing four-plane balancing of a new rotor, five calibration runs and at least one trim run (Run T) of the balanced machine are required. Vibration measurement during the first machine run without a trial weight is performed as Run 0 in the balancing workspace. Subsequent runs are performed with a trial weight, sequentially installed on the driveshaft in each correction plane (in the area of each balancing machine support).
Enne iga järgnevat käivitamist tuleb teha järgmised toimingud:
- Peatage tasakaalustatud masina rootori pöörlemine.
- Eemaldage eelnevalt paigaldatud proovikaal.
- Paigaldage proovikaal järgmisele tasapinnale.
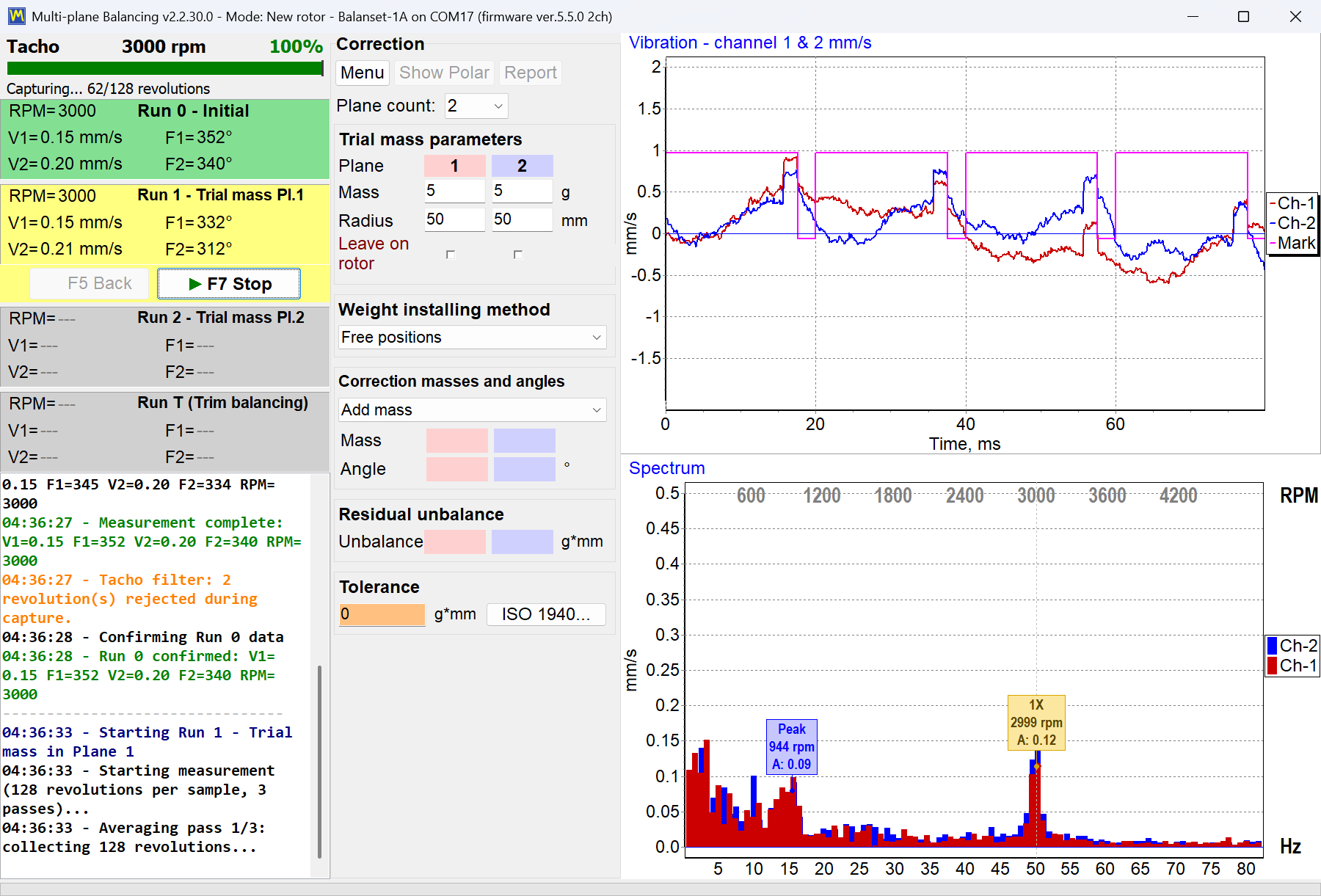
Figure 22. Balancing workspace (“F7 - Balancing”) during a measurement run: Run 0 - Initial, trial-mass runs Run 1 and Run 2, and the trim run Run T
Pärast iga mõõtmise lõpetamist registreeritakse rootori pöörlemissageduse (Nob), samuti RMS-väärtused (Vo1, Vo2, Vo3, Vo4) ja faasid (F1, F2, F3, F4) of the vibration at the rotational frequency of the balanced rotor are saved in the corresponding fields in the program window. After the fifth run (Weight in Plane 4), the balancing results with the polar plot (see Figure 23) appear, displaying the calculated values of the masses (M1, M2, M3, M4) ja paigaldusnurgad (f1, f2, f3, f4) korrigeerivatest raskustest, mis tuleb paigaldada rootorile neljas tasapinnas, et kompenseerida selle tasakaalustamatust.
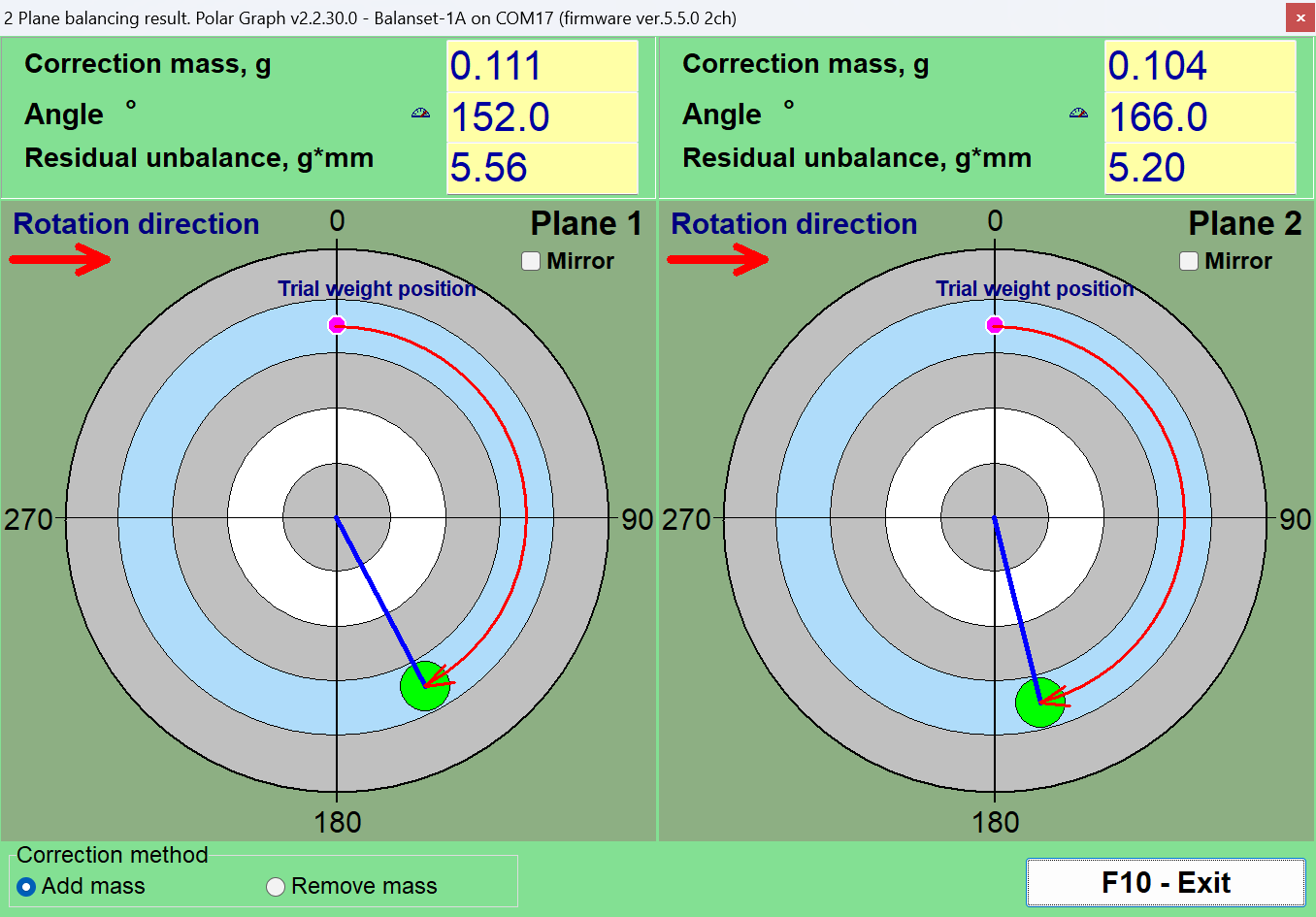
Figure 23. Polar plot of the balancing result: calculated correction masses and angles for each plane, measured from the trial weight position in the direction of rotation
Tähelepanu! Pärast tasakaalustatud masina viienda töötsükli mõõtmisprotsessi lõpetamist on vaja rootori pöörlemine peatada ja eelnevalt paigaldatud prooviviht eemaldada. Alles pärast seda saab jätkata parandusvihtude paigaldamist (või eemaldamist) rootorilt.
Polaarkoordinaatide süsteemis mõõdetakse rootorile parandusraskuse lisamise (või eemaldamise) nurkasendit katseraskuse paigalduskohast. Nurga mõõtmise suund langeb kokku rootori pöörlemissuunaga. Labadega tasakaalustamise korral langeb tinglikult esimeseks labaks peetava tasakaalustatud rootori laba katseraskuse paigalduskohaga. Arvutiekraanil kuvatav labade numeratsiooni suund järgib rootori pöörlemissuunda.
In this version of the program, it is assumed by default that the corrective weight will be added to the rotor. This is indicated by the mark set in the “Add mass” field. If correcting the imbalance by removing the weight (e.g., by drilling) is necessary, set the mark in the “Remove mass” field using the mouse, after which the angular position of the corrective weight will automatically change by 180 degrees.
After installing the corrective weights on the balanced rotor, carry out the trim run (Run T) to check the effectiveness of the balancing operation. After completing the trim run, the results of the rotor's rotation frequency (Nob) ja RMS-väärtused (Vo1, Vo2, Vo3, Vo4) ja faasid (F1, F2, F3, F4) of the vibration at the rotational frequency of the balanced rotor are saved. Simultaneously, the balancing results (see Figure 23) are updated, displaying the calculated parameters of additional corrective weights that need to be installed (or removed) on the rotor to compensate for its residual imbalance. Additionally, this workspace shows the values of the residual imbalance achieved after balancing. If the values of residual vibration and/or residual imbalance of the balanced rotor meet the tolerance requirements specified in the technical documentation, the balancing process can be completed. Otherwise, the balancing process can be continued. This method allows for correcting possible errors through successive approximations that may occur when installing (removing) the corrective weight on the balanced rotor.
If the balancing process continues, additional corrective weights must be installed (or removed) on the balanced rotor according to the calculated parameters shown in the balancing results.
The rotor balancing coefficients (dynamic influence coefficients) calculated from the results of the five calibration runs are saved in the computer's memory and can be reused with the “Load Coefficients” function when balancing rotors of the same type.
7. Jäikade rootorite soovitatavad tasakaalustamise täpsusklassid
The grades below are the balance quality grades G of ISO 1940-1, superseded without change of values by ISO 21940-11:2016. The grade is defined as G = eiga·Ω, where eiga is the permissible specific residual unbalance (g·mm/kg = µm) and Ω = 2πn/60 is the service angular velocity (rad/s). The permissible residual unbalance follows as Uiga = 9549·G·M/n [g·mm], split between the correction planes. See our ISO 1940-1 glossary entry.
The default grade for a road-vehicle driveshaft is G 40; G 16 applies when the drawing or the OEM specification calls for special requirements. Note that residual unbalance and vibration are separate acceptance criteria: the vibration of the assembled machine is assessed to ISO 20816 (formerly ISO 10816) — see our ISO 10816-1 glossary entry.
The G-grade table applies to rigid rotors only — rotors whose service speed stays below roughly 0.5…0.7 of the first bending critical speed. Long driveshafts (2 m and above, and any shaft with an intermediate support) can approach that limit: check the shaft's first critical speed against both the service speed and the balancing speed. If the shaft is flexible at speed, use a modal / multi-speed procedure (ISO 21940-12) — a two-plane rigid-rotor correction will not hold.
Tabel 2. Jäikade rootorite soovitatavad tasakaalustamise täpsusklassid.

| Masinate tüübid (rootorid) | Tasakaalustamise täpsusklass | Balance quality grade G = eiga·Ω, mm/s |
|---|---|---|
| Suurte madala pöörlemiskiirusega (kolvi kiirus alla 9 m/s) laevade diiselmootoritele mõeldud (konstruktsiooniliselt tasakaalustamata) ajamivõllid. | G 4000 | 4000 |
| ajamivõllid (konstruktsiooniliselt tasakaalustatud) suurtele madala kiirusega meredüüselmootoritele (kolvi kiirus alla 9 m/s) | G 1600 | 1600 |
| Vibratsioonisolaatoritel olevad (konstruktsiooniliselt tasakaalustamata) ajamivõllid | G 630 | 630 |
| Jäikadel tugedel olevad (konstruktsiooniliselt tasakaalustamata) ajamivõllid | G 250 | 250 |
| Sõiduautode, veoautode ja vedurite jaoks kokkupandavad kolbmootorid | G 100 | 100 |
| Ajamiväntvõllid (struktuurselt tasakaalustatud) vibratsiooniisolaatoritel | G 40 | 40 |
| Car wheels, wheel rims, wheel sets, drive shafts (cardan shafts) | G 40 | 40 |
| Põllumajandusmasinad | G 16 | 16 |
| Jäikadel tugedel olevad (tasakaalustatud) ajamivõllid | G 16 | 16 |
| Purustid | G 16 | 16 |
| Drive shafts (propeller / cardan shafts) with special requirements | G 16 | 16 |
| Õhusõidukite gaasiturbiinid | G 6.3 | 6.3 |
| tsentrifuugid (separaatorid, settlerid) | G 6.3 | 6.3 |
| elektrimootorid ja generaatorid (mille võlli kõrgus on vähemalt 80 mm), mille maksimaalne nimipöörlemiskiirus on kuni 950 min.-1 | G 6.3 | 6.3 |
| Elektrimootorid, mille võlli kõrgus on alla 80 mm | G 6.3 | 6.3 |
| Ventilaatorid | G 6.3 | 6.3 |
| Käigukastid | G 6.3 | 6.3 |
| Üldotstarbelised masinad | G 6.3 | 6.3 |
| Metallilõikamismasinad | G 6.3 | 6.3 |
| Paberi valmistamise masinad | G 6.3 | 6.3 |
| Pumbad | G 6.3 | 6.3 |
| Turbolaadurid | G 6.3 | 6.3 |
| Veeturbiinid | G 6.3 | 6.3 |
| Kompressorid | G 6.3 | 6.3 |
| Arvutiga juhitavad ajamid | G 2.5 | 2.5 |
| elektrimootorid ja generaatorid (mille võlli kõrgus on vähemalt 80 mm), mille maksimaalne nimipöörlemiskiirus on üle 950 min.-1 | G 2.5 | 2.5 |
| Gaasi- ja auruturbiinid | G 2.5 | 2.5 |
| Metallilõikamismasina ajamid | G 2.5 | 2.5 |
| Tekstiilimasinad | G 2.5 | 2.5 |
| Audio- ja videoseadmete ajamid | G 1 | 1 |
| Lihvimismasinate ajamid | G 1 | 1 |
| Spindlid ja täppisseadmete ajamid | G 0.4 | 0.4 |
Korduma kippuvad küsimused veovõlli tasakaalustamise kohta
Mis on veovõlli tasakaalustamine?
Veovõlli tasakaalustamine on protsess, mille käigus korrigeeritakse veovõlli massi tasakaalustamatust, et see pöörleks sujuvalt ja vibratsiooni tekitamata. See hõlmab võlli ühe külje raskema osa mõõtmist ja seejärel väikese raskuse lisamist või eemaldamist (näiteks tasakaalustusraskuste keevitamist), et seda tasakaalustamatust kompenseerida. Tasakaalustatud veovõll töötab ühtlaselt, mis hoiab ära liigse vibratsiooni ja sõiduki komponentide kulumise.
Miks on veovõlli tasakaalustamine oluline?
Tasakaalustamata veovõll võib põhjustada tugevat vibratsiooni, eriti teatud kiirustel, ning kiirendamisel või käiguvahetusel võib tekkida kolksuvaid helisid. Aja jooksul võivad need vibratsioonid kahjustada laagreid, universaalseid liigendeid ja muid jõuülekande komponente. Veovõlli tasakaalustamine kõrvaldab need vibratsioonid, tagades sujuvama sõidu, vähendades osade koormust ja ennetades kulukaid kahjustusi või seisakuid.
Millised on tasakaalustamata veovõlli tavalised sümptomid?
Tasakaalustamata või vigase kardaanvõlli tüüpilisteks sümptomiteks on märgatav vibratsioon või värisemistunne sõiduki põrandas või istmes, eriti kiiruse suurenedes. Käikude vahetamisel või kiirendamisel ja aeglustamisel võite kuulda ka koputamist või ragistamist. Mõnel juhul võib universaalne liigend tasakaalustamatuse tõttu üle kuumeneda. Kui märkate neid märke, vajab kardaanvõll tõenäoliselt tasakaalustamist või remonti.
Kuidas tasakaalustada veovõlli?
Drive shaft balancing is usually done using a specialized balancing machine. The drive shaft is mounted and spun at high speed while sensors detect any imbalance. A technician then attaches small weights to the drive shaft (or removes material) at specific positions based on the machine's readings. This process is repeated until the drive shaft rotates without significant vibration. Modern systems like the Balanset-4A can guide this process and calculate exactly where and how much weight to add for precise balancing.
Kokkuvõte
Kokkuvõtteks võib öelda, et kardaanvõlli õige tasakaalustamine on ohutuse, jõudluse ja kulude kokkuhoiu tagamiseks hädavajalik. By detecting and correcting imbalance, you prevent unnecessary wear on parts, avoid damaging breakdowns, and maintain optimal machine performance. Modern balancing systems like our Balanset-1A and Balanset-4A devices make the process efficient, helping even small workshops achieve professional results.
Kui teil esineb püsivaid kardaanvõlli vibratsioone või vajate usaldusväärset tasakaalustuslahendust, siis ärge kartke tegutseda. Järgige selles juhendis kirjeldatud samme või konsulteerige abi saamiseks meie ekspertidega. Õige lähenemisviisi ja varustuse abil saate tagada oma kardaanvõlli sujuva ja usaldusväärse töö veel aastaid. Võtke meiega ühendust et rohkem teada saada või uurida oma vajadustele vastavaid parimaid veovõlli tasakaalustusseadmeid.







0 Comments