Ar Balanset-1A var mērīt rotora relatīvo vibrāciju, izmantojot bezkontakta lineāros kodētājus.
1.1 Sensora tipa un iestatījumu izvēle.
Atkarībā no uzdevuma mērījumiem var izmantot vibrācijas sensorus vai pārvietojuma sensorus.
Lai izvēlētos sensora tipu, panelī "Sensora tips" (galvenā loga apakšdaļā) ir nepieciešams atzīmēt lauku "Vibro" vai "Linear".
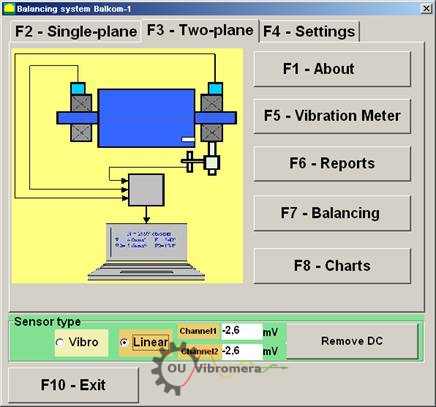
1. attēls. Programmas Balanset galvenais darba logs.T
Pirms mērījumu uzsākšanas ir jāpārliecinās, ka sensoru konversijas koeficienti ir pareizi iestatīti. Šim nolūkam programmas galvenajā darba logā nospiediet pogu "F4-Settings" (skatīt 1. attēlu) un dodieties uz iestatījumu logu, kas paredzēts konversijas koeficientu ievadīšanai (skatīt 2. attēlu).
Darba logā, kas parādīts 2. attēlā, attiecīgajos laukos jāievada lineāro un vibrācijas sensoru konversijas koeficienti. Šie koeficienti ir norādīti instrumenta pasē. Parasti tie nav jāmaina.
Balanset-1A instrumenta komplektā izmantotajiem lineārajiem pārvietojuma sensoriem konversijas koeficienti ir attiecīgi vienādi:
Kprl1 = 0,94 mV/μm (1. kanāla sensora konversijas koeficients);
Kprl2 = 0,94 mV/μm (2. kanāla sensora konversijas koeficients.
Pareizai darbībai lineārais kodētājs jāuzstāda noteiktā attālumā no mērāmā objekta virsmas. Nominālais attālums starp virsmu un sensora galu ir 3,5 mm. Šajā gadījumā sensora izejā ir konstants 2,48 voltu spriegums. Šis spriegums tiks parādīts laukos "Channel1" un "Channel2" attiecīgi pirmajam un otrajam kanālam.
Lai to kompensētu, ir jānospiež poga "Noņemt DC". Neliela atlikusī nobīde netraucēs mērījumiem.
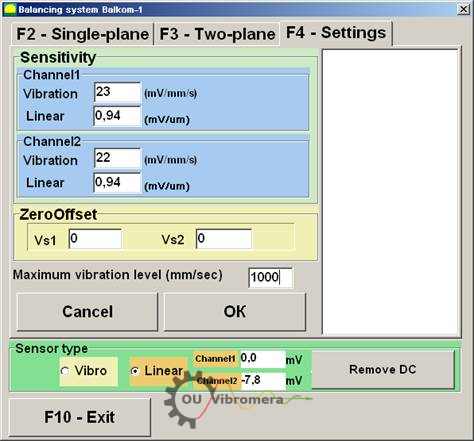
2. attēls. Darba logs konversijas koeficientu ievadīšanai un izmantoto sensoru tipa izvēlei
Uzmanību!
Noteiktās nominālās klīrensa vērtības un lineāro enkoderu konversijas koeficienti ir doti rotoriem, kas izgatavoti no tērauda.
Rotoriem, kas izgatavoti no citiem metāliem (vara, bronzas, alumīnija), nominālā klīrensa un sensoru konversijas koeficienti jānosaka eksperimentāli, veicot kalibrēšanu.
Lai saglabātu mainītos parametrus, nospiediet pogu "OK". Jaunie parametri tiks saglabāti failā un izmantoti turpmākajiem mērījumiem.
1.2 Rotora radiālā izlieciena mērīšana.
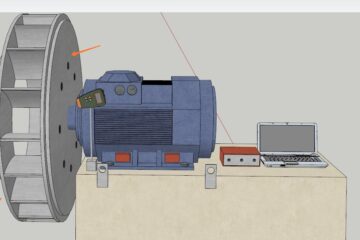
Rotora radiālo izlieci var izmērīt ar bezkontakta zondēm divās plaknēs saskaņā ar 3. attēlā parādīto shēmu.
Lai nepieciešamības gadījumā varētu izmērīt un uzzīmēt laika funkciju un rotora izslīdēšanas spektru, ir jāveic vairākas sagatavošanās darbības, tostarp:
- izvēlas rotora diametrālās sekcijas, kurās tiks veikti mērījumi;
- uzstādīt bezkontakta lineārā pārvietojuma sensorus 5 un 6 un fāzes leņķa sensoru 7 uz mašīnas gultas, izmantojot īpašas ierīces (piemēram, magnētiskos statīvus);
- savienojiet lineārās kustības tuvuma sensorus ar X1 un X2 savienotājiem un fāzes leņķa sensoru ar mērvienības X3 savienotāju;
- katram lineārajam kodētājam iestatiet nominālo mērīšanas spraugu ∆ starp rotora virsmu un sensora elementu (tērauda rotoram ∆ = 3,5 mm);
- novietojiet uz rotora atstarojošo zīmi, kas nepieciešama fāzes leņķa sensora 7 aktivizēšanai, un pārbaudiet sensora aktivizēšanu;
- savienojiet mērvienību ar datoru.
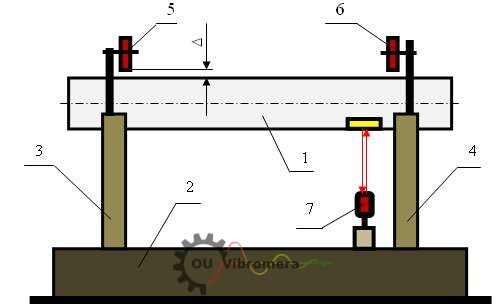
3. attēls. Rotora radiālā izlieciena mērīšana
Ja galvenajā darba logā (skatīt 1. attēlu) nospiežat pogu "F8 - Grafiki", datora displejā tiek parādīts darba logs "Grafiki" (skatīt 5. attēlu), kas paredzēts rotora radiālā izkliedējuma dažādu veidu grafiku veidošanai.
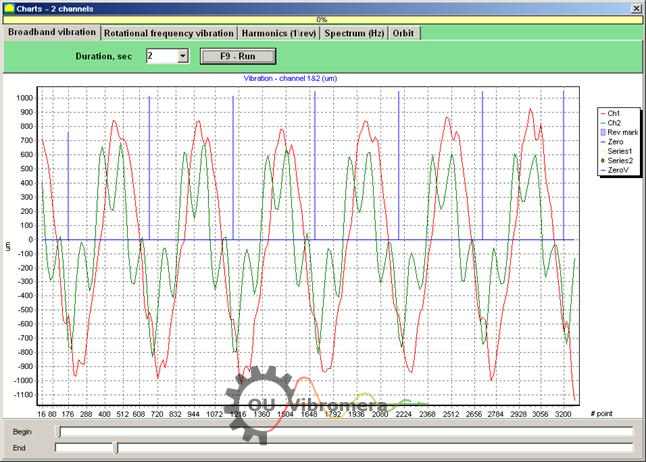
5. attēls. Režīma "Diagrammas" darba logs
Nospiežot šajā logā pogu "Platjoslas vibrācija", tiek parādīta rotora radiālā izkliedes laika funkcija.
Ja tiek nospiesta poga "Rotācijas frekvences vibrācija", tiek parādīta rotora radiālā izkliedes savstarpējās komponentes laika funkcija.
Nospiežot pogu "Harmonikas (1/rev)", displejā parādīsies rotora izkliedes grafiks, kas sadalīts harmoniku virknē. Pirmā harmonika atbilst vibrācijas vērtībai pie apgrieztās rotora frekvences (1x), otrā - pie dubultās frekvences (2x) utt.
Nospiežot pogu "Spektrs (Hz)", displejā tiek parādīts rotora radiālā izskrējiena spektrs.
Nospiežot pogu "Orbīta", tiek parādīts rotora orbītas (precesijas) grafiks.
1.3 Rotora orbītas grafika konstrukcija.
Rotora orbītas grafika konstruēšanu var veikt saskaņā ar 6. attēlā parādīto shēmu.

6. attēls. Rotora orbītas mērījumu shēma 1a - rotors (skats no gala); 1b - rotors (skats no sāniem); 2, 3 - bezkontakta sensori; 4 - fāzes leņķa sensora atstarošanas zīme.
Lai veiktu mērījumu un izveidotu atbilstošu grafiku, ir jāveic vairākas sagatavošanās darbības, tostarp:
- uzstādīt bezkontakta lineāros kodētājus 2 un 3 vienā no rotora diametrālajām sekcijām 90° leņķī viens pret otru, ar nosacījumu, ka kodētāja 2 mērīšanas asij jāsakrīt ar X asi, bet kodētāja 3 mērīšanas asij jāsakrīt ar Y asi;
- iestatiet nominālo mērīšanas atstarpi ∆x (∆u) starp rotora virsmu un katra lineārā enkoderī sensora elementu (tēraudam ∆ = 3,5 mm);
- uzstādiet fāzes leņķa sensoru (shēmā nav parādīts) X-Z plaknē, kas sakrīt ar bezkontakta sensora 2 uzstādīšanas plakni;
- uz rotora 1 X - Z plaknē uzstādiet atstarojošo zīmi 4, kas ir nepieciešama fāzes leņķa sensora darbībai;
- bezkontakta lineāros kodētājus 2 un 3 pievienojiet mērvienības X1 un X2 savienotājiem, bet fāzes leņķa kodētāju - X3 savienotājam;
- savienojiet mērvienību ar datoru.
Lai sāktu rotora orbītas mērījumus galvenajā darba logā (skat. 1. att.).
Nospiediet pogu "F8 - Grafiki" un atveriet darba logu "Grafiki" (skatīt 5. attēlu), kas ir paredzēts rotora radiālā novirzes grafika veidošanai.
Šajā darba logā jānospiež poga "Orbīta", pēc tam datora displejā parādās darba logs, kurā tiek veikts nepieciešamais mērījumu cikls (sk. 7. attēlu).
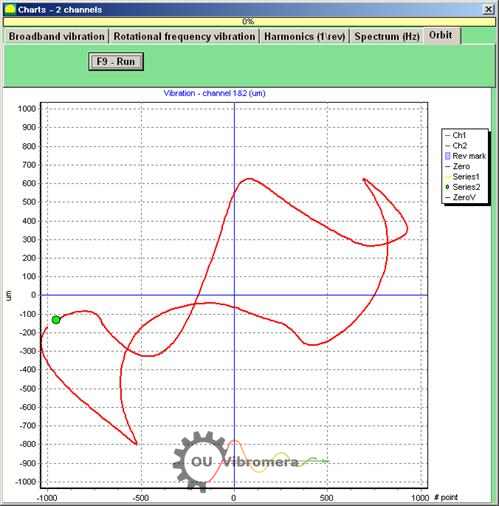
7. attēls. Rotora orbītas grafiks. Balanset programmatūra.
Lai turpinātu darbu norādītajā darba logā (sk. 7. att.), ir jāieslēdz rotora rotācija un, nospiežot pogu "F9 - RUN", jāveic rotora radiālā izskrējiena momentāno vērtību Sxi un Sui mērījumi uz laiku, kas vienāds ar vienu rotora apgriezienu.
Mērījumu laikā iegūto momentāno vērtību Sxi un Sui masīvu izmanto, lai aprēķinātu kontrolējamā rotora orbītas koordinātas, ko veic pēc formulas:
S∑i = √ (Sxi² + Syi²) (1)
kur S∑i ir rotora orbītas orbītas koordinātas momentānā vērtība, kas aprēķināta i-tajam grafika punktam;
Sxi - rotora radiālās izslīdēšanas momentānā vērtība, ko mēra pēc X koordinātas ar 1. sensoru i-tajā punktā;
Sxi - rotora radiālās izslīdēšanas momentānā vērtība, ko mēra pēc Y koordinātas ar sensoru 2 i-tajā punktā.