ทำความเข้าใจเครื่องวิเคราะห์การสั่นสะเทือน







A เครื่องวิเคราะห์การสั่นสะเทือน เป็นเครื่องมืออิเล็กทรอนิกส์ที่ใช้ในการวัด จัดเก็บ และแสดงผลข้อมูลโดยละเอียด การสั่นสะเทือน ข้อมูลจากเครื่องจักร เป็นเครื่องมือหลักของนักวิเคราะห์สำหรับการวิเคราะห์เชิงลึก การวินิจฉัยการสั่นสะเทือน — อุปกรณ์ที่คุณหยิบขึ้นมาเมื่อคุณต้องการเข้าใจไม่ใช่แค่เพียง เท่าไร เครื่องจักรกำลังสั่น แต่ อะไรกันแน่ กำลังเกิดอะไรขึ้นภายในเครื่องจักร ในขณะที่ เครื่องวัดการสั่นสะเทือน รายงานเพียงค่ารวมค่าเดียว เครื่องวิเคราะห์จะจับสัญญาณทั้งหมดและประมวลผลสัญญาณนั้น — ที่สำคัญที่สุดคือด้วย การแปลงฟูเรียร์อย่างรวดเร็ว (FFT) — เพื่อแยกการสั่นสะเทือนออกเป็นความถี่แต่ละส่วนประกอบ.
1. คำจำกัดความ: เครื่องวิเคราะห์การสั่นสะเทือนคืออะไร?
ลักษณะเด่นของเครื่องวิเคราะห์คือการแปลงสัญญาณดิบให้เป็นข้อมูลเชิงวินิจฉัย โดยการแปลงสัญญาณตามเวลาให้เป็นข้อมูลในโดเมนความถี่ สเปกตรัม, มันช่วยให้ผู้วิเคราะห์สามารถจดจำลายนิ้วมือของข้อบกพร่องเฉพาะได้: ความไม่สมดุล ที่ความเร็วในการวิ่ง, การจัดตำแหน่งที่ไม่ถูกต้อง และองค์ประกอบ 2× ที่เป็นลักษณะเฉพาะของมัน, ข้อบกพร่องของตลับลูกปืน ที่ความถี่ความผิดพลาดที่ไม่ตรงกัน และอื่น ๆ อีกมากมาย ค่าโดยรวมจะบอกคุณว่าเครื่องจักรไม่สมบูรณ์; สเปกตรัมจะบอกคุณว่า ทำไม. ความแตกต่างนั้น — จากค่าขนาดเดียวไปเป็นภาพที่แยกตามความถี่ — คือเหตุผลทั้งหมดที่เครื่องมือนี้มีอยู่ และเป็นสิ่งที่แยกการเฝ้าติดตามสภาพ การคัดกรอง จากการวินิจฉัยที่แท้จริง.
2. ข้อมูลที่เครื่องวิเคราะห์การสั่นสะเทือนให้
เครื่องวิเคราะห์มีคุณค่าอย่างยิ่งเพราะสามารถแสดงสัญญาณการสั่นสะเทือนเดียวกันในหลาย “มุมมอง” ซึ่งแต่ละมุมมองจะตอบคำถามการวินิจฉัยที่แตกต่างกัน:
- ระดับการสั่นสะเทือนโดยรวม: ค่าเดียวที่รวมกันตลอดช่วงความถี่ที่กำหนดไว้ ซึ่งมักใช้สำหรับการตรวจสอบสภาพอย่างรวดเร็วและการติดตามแนวโน้ม.
- รูปคลื่นเวลา: สัญญาณดิบเทียบกับเวลา ซึ่งมีประโยชน์ในการประเมินรูปร่างและความเสถียรของการสั่นสะเทือน และสำหรับการตรวจจับพฤติกรรมที่ไม่เป็นรูปไซน์ เช่น การกระแทกหรือการตัดสัญญาณ.
- FFT สเปกตรัม: แอมพลิจูดเทียบกับความถี่ — มุมมองหลักสำหรับการดูว่าความถี่ใดมีอยู่และพลังงานกระจายตัวอย่างไรในหมู่พวกมัน.
- ความเร็วในการวิ่ง คอมโพเนนต์ (1×): ส่วนที่ซิงโครไนซ์กับการหมุนของโรเตอร์ ซึ่งเป็นข้อมูลอ้างอิงสำคัญสำหรับการวิเคราะห์เครื่องจักรหมุนส่วนใหญ่.
- ฮาร์โมนิกส์ ของความเร็วในการวิ่ง: องค์ประกอบที่ค่าจำนวนเต็มคูณ (2×, 3×, …) เปรียบเทียบกันเพื่อประเมินการมีส่วนร่วมสัมพัทธ์ของแต่ละองค์ประกอบ.
- ข้อมูลอ้างอิงความเร็วและเฟส: งานวินิจฉัยและการปรับสมดุลหลายอย่างต้องการความเร็วที่แม่นยำและ เฟส อ้างอิงจาก เครื่องวัดความเร็วรอบ.
3. วิธีที่เครื่องวิเคราะห์การสั่นสะเทือนเปลี่ยนการวัดให้เป็นข้อมูลการวินิจฉัย
เครื่องวิเคราะห์รับสัญญาณจากเซ็นเซอร์ของมัน — โดยส่วนใหญ่เป็น มาตรความเร่ง — และประมวลผลในซอฟต์แวร์:
- การรับสัญญาณ: มันจับรูปแบบคลื่นเวลาบนหนึ่งหรือหลายช่องสัญญาณ ทำให้สามารถเปรียบเทียบจุดต่างๆ บนเครื่องเดียวกันได้โดยตรง.
- การวิเคราะห์ความถี่ (FFT): รูปคลื่นดิบถูกแปลงเป็นสเปกตรัมด้วย FFT, เผยให้เห็นส่วนประกอบที่แยกจากกันและฮาร์มอนิกของพวกมัน.
- การประมวลผลแบบซิงโครนัสด้วยเครื่องวัดความเร็วรอบ เมื่อได้รับข้อมูลอ้างอิงเฟส เครื่องวิเคราะห์จะดึงส่วนประกอบ 1× และสร้างแผนภูมิที่ซิงโครไนซ์กับการหมุนของโรเตอร์หนึ่งรอบ ซึ่งเป็นพื้นฐานเดียวกันที่ใช้สำหรับมุมมองฮาร์มอนิกบางประเภท.
- การตั้งค่าและการควบคุมการวัด: ผู้ใช้เลือกช่วงความถี่, เวลาการเก็บข้อมูล และตัวเลือกการประมวลผล เช่น การใช้หน้าต่าง ฟังก์ชันที่ถูกนำไปใช้ก่อนการแปลง.
ตัวเลือกที่ทำในขั้นตอนการได้มาซึ่งข้อมูลจะกำหนดว่าสเปกตรัมสามารถแยกแยะอะไรได้บ้าง: ช่วงความถี่และจำนวนเส้นที่กำหนดร่วมกันจะกำหนดความละเอียด ดังนั้นองค์ประกอบที่ห่างกันใกล้เคียงกัน — เช่น โทนเสียงที่อยู่ใกล้กับฮาร์โมนิก — จะสามารถแยกแยะได้ก็ต่อเมื่อการตั้งค่ารองรับเท่านั้น เครื่องคำนวณความละเอียด FFT ทำให้การแลกเปลี่ยนระหว่างช่วง, เส้น และ ความกว้างของช่องชัดเจนก่อนที่คุณจะวัด.
4. องค์ประกอบของระบบการวิเคราะห์การสั่นสะเทือน
ระบบที่สมบูรณ์โดยทั่วไปประกอบด้วย:
- เครื่องวิเคราะห์ / เครื่องมือเก็บข้อมูล: ฮาร์ดแวร์ที่รับสัญญาณจากเซ็นเซอร์และให้ฟังก์ชันการวัด.
- เซ็นเซอร์: โดยทั่วไป มาตรความเร่ง, อย่างไรก็ตาม ขึ้นอยู่กับงานและประเภทของเครื่องจักร อาจมีการใช้เซ็นเซอร์อื่น ๆ — ตัวอย่างเช่น หัววัดระยะใกล้ สำหรับการวัดการเคลื่อนที่ของเพลาโดยตรงบนตลับลูกปืนฟิล์มของเหลว.
- มาตรวัดรอบ / เฟสอ้างอิง: จำเป็นสำหรับการวัดความเร็วและทุกฟังก์ชันที่เกี่ยวข้องกับเฟส (1×, ฮาร์มอนิกส์, การถ่วงสมดุล, การวัดแบบซิงโครนัส).
- ซอฟต์แวร์โฮสต์: แอปพลิเคชัน — มักจะอยู่บนคอมพิวเตอร์ — ที่แสดงแผนภูมิ, เก็บผลลัพธ์, เปรียบเทียบการวัดผลตามเวลา และสร้างรายงาน.
การแยกหน่วยวัดออกจากซอฟต์แวร์ที่ใช้กับคอมพิวเตอร์ส่วนบุคคลนี้เองคือสิ่งที่กำหนดความเป็นสมัยใหม่ เครื่องวิเคราะห์แบบพกพา: แล็ปท็อปจัดหาหน้าจอ, กำลังประมวลผล และพื้นที่จัดเก็บ, ดังนั้นฮาร์ดแวร์ภาคสนามสามารถมีขนาดกะทัดรัดได้.
5. ตัวอย่าง: ฟังก์ชันการวิเคราะห์การสั่นสะเทือนในซอฟต์แวร์ Balanset-1A
Balanset-1A เป็นระบบแบบสองช่องสัญญาณที่ใช้คอมพิวเตอร์เป็นฐานสำหรับการถ่วงสมดุลโรเตอร์และการวัดการสั่นสะเทือน ซึ่งใช้โดยวิศวกรในกว่า 50 ประเทศ นอกเหนือจากฟังก์ชันการถ่วงสมดุลแล้ว ยังมีการวัดและวิเคราะห์การสั่นสะเทือนผ่านเครื่องมือเสริมสองชนิด: โหมดเครื่องวัดการสั่นสะเทือน และ โหมดแผนภูมิ. นี่คือตัวอย่างที่เป็นรูปธรรมและใช้งานได้จริงของสถาปัตยกรรมทั่วไปที่ได้อธิบายไว้ข้างต้น — หน่วยวัดสองช่องสัญญาณที่ส่งข้อมูลไปยังซอฟต์แวร์ Windows.
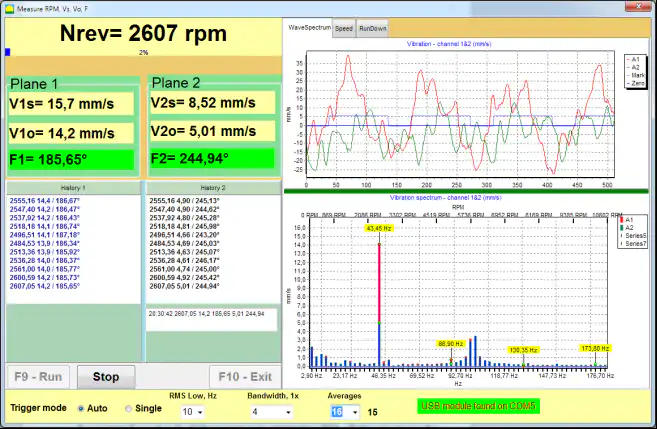
5.1 โหมดเครื่องวัดการสั่นสะเทือน: ค่าตัวเลขดิจิทัลพร้อมคลื่นและสเปกตรัม
ในโหมดเครื่องวัดการสั่นสะเทือน ซอฟต์แวร์จะแสดงการสั่นสะเทือนโดยรวมและส่วนประกอบของการสั่นสะเทือน 1× (พร้อมเฟสเมื่อเชื่อมต่อกับเครื่องวัดความเร็วรอบ) หน้าจอเดียวกันนี้ยังสามารถแสดงรูปคลื่นและมุมมองสเปกตรัมได้อีกด้วย ทำให้สามารถตรวจสอบตัวเลขอย่างรวดเร็วและดูเนื้อหาความถี่เบื้องต้นได้พร้อมกัน.
5.2 โหมดแผนภูมิ: สี่ประเภทแผนภูมิสำหรับการวิเคราะห์เชิงลึก
โหมดแผนภูมิใช้เมื่อคุณต้องการการวิเคราะห์แบบกราฟิกในสองช่องสัญญาณ มันมีแผนภูมิให้เลือกสี่ประเภท:
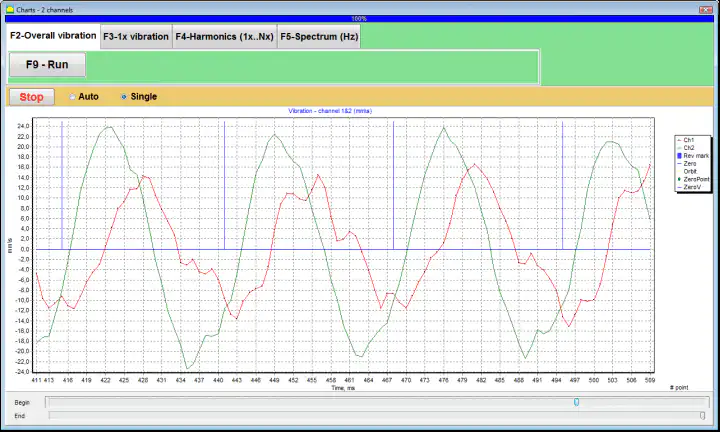
- ฟังก์ชันเวลาการสั่นสะเทือนโดยรวม — รูปแบบคลื่นเวลาของการสั่นสะเทือนโดยรวม.
- 1× แผนภูมิการสั่นสะเทือน ซิงโครไนซ์กับการหมุนของโรเตอร์หนึ่งรอบ.
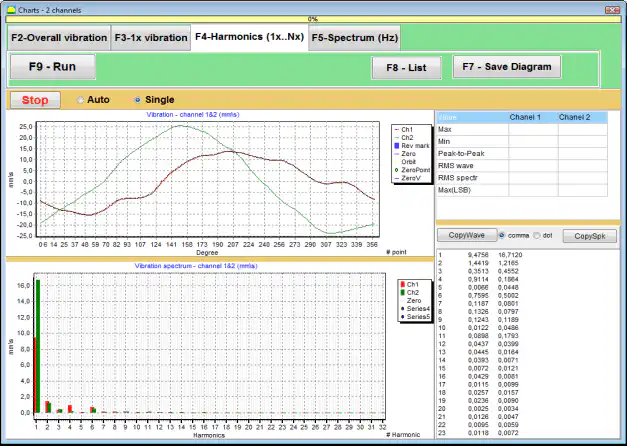
- ฮาร์มอนิกของการสั่นสะเทือน 1 เท่า — ส่วนประกอบฮาร์โมนิกของความเร็วในการวิ่ง.
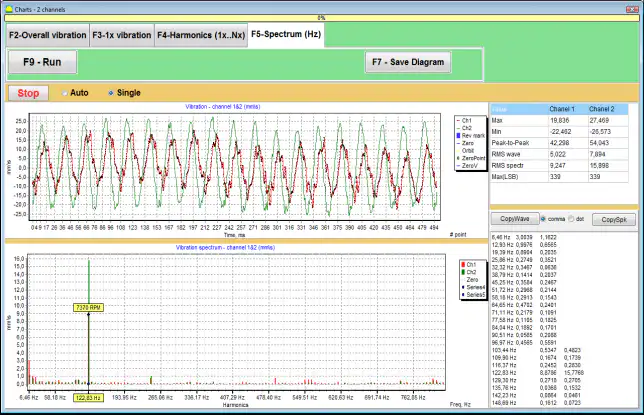
- สเปกตรัม FFT — มุมมองสเปกตรัม โดยแสดงรูปคลื่นอยู่ด้านบน.
ฟังก์ชันเวลาการสั่นสะเทือนโดยรวม
แผนภูมินี้แสดงการเปลี่ยนแปลงของความสั่นสะเทือนตามเวลา มีประโยชน์สำหรับการประเมินความเสถียรและระบุการเปลี่ยนแปลงในช่วงเวลาที่ทำการวัด.
1× แผนภูมิการสั่นสะเทือน (มุมมองแบบซิงโครไนซ์)
มุมมองนี้แสดงการสั่นสะเทือน 1 เท่าตลอดการหมุนของโรเตอร์หนึ่งรอบ โดยซิงโครไนซ์กับเครื่องหมายเฟสจากเครื่องวัดความเร็วรอบ และใช้เมื่อคุณต้องการวิเคราะห์การสั่นสะเทือนที่สัมพันธ์กับความเร็วในการทำงาน ซึ่งเป็นพื้นฐานของข้อมูลแอมพลิจูดและเฟสที่การถ่วงสมดุลอาศัย.

ฮาร์มอนิกของการสั่นสะเทือน 1 เท่า
มุมมองนี้แสดงส่วนประกอบฮาร์มอนิกที่เกี่ยวข้องกับความเร็วในการทำงาน ช่วยให้คุณสามารถเปรียบเทียบระดับฮาร์มอนิกในแผนภูมิเดียวได้.
มุมมองสเปกตรัม FFT
มุมมองนี้แสดงสเปกตรัมการสั่นสะเทือน — เครื่องมือหลักในการระบุองค์ประกอบความถี่และลายเซ็นของความผิดปกติ — โดยมีรูปคลื่นแสดงอยู่เหนือสเปกตรัมเพื่อให้บริบทเพิ่มเติม เครื่องมือนี้วัดการสั่นสะเทือนในช่วงตั้งแต่ประมาณ 5 Hz ไปจนถึง 1000 Hz ซึ่งครอบคลุมความเร็วในการทำงานและฮาร์มอนิกต่ำของเครื่องจักรอุตสาหกรรมทั่วไปได้อย่างสบาย.
5.3 ขั้นตอนการวัดทั่วไป (มุมมองเชิงปฏิบัติ)
กระบวนการทำงานภาคสนามทั่วไปนั้นเข้าใจง่าย:
- ติดตั้งเซ็นเซอร์การสั่นสะเทือนที่จุดวัดของเครื่องจักร.
- ติดตั้ง เครื่องวัดความเร็วรอบ และติดเทปสะท้อนแสง (เครื่องหมายเฟส) บนโรเตอร์ทุกครั้งที่ต้องการใช้ฟังก์ชันเฟสหรือฟังก์ชันซิงโครไนซ์แบบ 1×.
- เชื่อมต่อเซ็นเซอร์เข้ากับหน่วยวัด Balanset-1A และเชื่อมต่อหน่วยกับแล็ปท็อปที่ใช้ระบบปฏิบัติการ Windows.
- เปิดโหมดเครื่องวัดการสั่นสะเทือนเพื่อตรวจสอบอย่างรวดเร็ว จากนั้นสลับไปที่โหมดแผนภูมิเพื่อการวิเคราะห์ที่ลึกขึ้น — รูปแบบคลื่นโดยรวม, แผนภูมิ 1×, ฮาร์มอนิกส์ และสเปกตรัม.
- บันทึกการวัดไว้เพื่อเปรียบเทียบในภายหลังและสำหรับการรายงาน.
กระบวนการทำงานเดียวกันนี้เป็นพื้นฐานของ การถ่วงสมดุลภาคสนาม: เครื่องวิเคราะห์จะวัดการตอบสนองต่อความไม่สมดุลก่อน จากนั้นเมื่อติดตั้งน้ำหนักแก้ไขแล้วจึงวัดซ้ำเพื่อยืนยันผลลัพธ์ — การวินิจฉัยและการแก้ไขดำเนินการด้วยเครื่องมือเพียงเครื่องเดียว.
6. บทบาทของนักวิเคราะห์
แม้จะมีเครื่องวิเคราะห์ที่ทรงพลัง ผลลัพธ์ก็ยังคงขึ้นอยู่กับการตั้งค่าการวัดที่ถูกต้องและการตีความอย่างถูกต้อง เครื่องมือให้ข้อมูล — รูปแบบคลื่น, สเปกตรัม และแผนภูมิที่ซิงโครไนซ์ — แต่ผู้เชี่ยวชาญคือผู้ที่ตัดสินใจว่า รูปแบบเหล่านั้นหมายถึงอะไรสำหรับสภาพของเครื่องจักร และควรดำเนินการอย่างไรสเปกตรัมที่สะอาดจากเซ็นเซอร์ที่ติดตั้งไม่ดี หรือลายเซ็นจากตำราที่อ่านนอกบริบท จะทำให้เข้าใจผิดได้แน่นอนไม่ต่างจากตัวเลขที่ผิด เครื่องวิเคราะห์เปรียบเสมือนกล้องจุลทรรศน์ ส่วนวิศวกรคือผู้วินิจฉัย.