Rotori suhtelise vibratsiooni mõõtmine kontaktivabade lineaarsete nihkeandurite abil
Koos Balanset-1A saate mõõta suhtelist vibratsioon kohta rootor kasutades kontaktivabasid lineaarsensoreid.
1.1 Anduri tüübi valik ja seadistamine
Sõltuvalt ülesandest võib mõõtmiseks kasutada kas vibratsiooniandureid või nihkeandureid. Anduri tüübi valimiseks tuleb paneelis „Anduri tüüp“ (peaaakna allosas) märkida valik „Vibro“ või „Linear“.
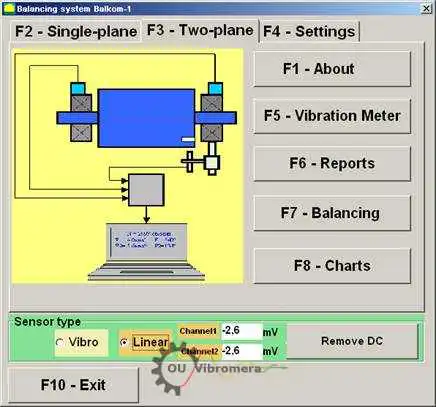
Joonis 1. Programmi Balanset peamine tööaken.T
Enne mõõtmise alustamist tuleb veenduda, et andurite muundamiskoefitsiendid on õigesti seadistatud. Selleks vajutage programmi põhitööaknas (vt joonis 1) nuppu "F4-Settings" ja minge teisenduskoefitsientide sisestamiseks mõeldud seadete aknasse (vt joonis 2).
Joonisel 2 kujutatud tööaknas tuleb vastavatesse väljadesse sisestada lineaar- ja vibratsiooniandurite muundamiskoefitsiendid. Need koefitsiendid on määratud seadme passis. Tavaliselt ei ole neid vaja muuta.
Lineaarse jaoks nihe Balanset-1A seadme komplektis kasutatavate andurite puhul on teisendustegurid vastavalt järgmised:
- Kprl1= 0,94 mV/μm (1. kanali anduri muundumistegur);
- Kprl2 = 0,94 mV/μm (2. kanali anduri muundumistegur.
Nõuetekohaseks toimimiseks tuleb lineaarkooder paigaldada teatud kaugusele mõõdetava objekti pinnast. Nominaalne kaugus pinna ja anduri otsa vahel on 3,5 mm. Sellisel juhul on anduri väljundil pidev pinge 2,48 volti. See pinge kuvatakse vastavalt esimese ja teise kanali väljadel "Channel1" ja "Channel2".
Selle kompenseerimiseks peate vajutama nuppu "Eemalda DC". Väike jääknihe ei sega mõõtmist.
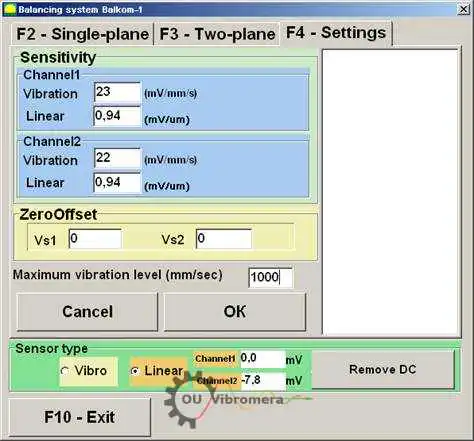
Joonis 2. Tööaken muundamiskoefitsientide sisestamiseks ja kasutatavate andurite tüübi valimiseks.
Tähelepanu! Nimetatud nimimõõtude väärtused ja lineaarsete andurite ümberarvestuskoefitsiendid on esitatud terasest rootorite puhul. Muudest metallidest (vask, pronks, alumiinium) valmistatud rootorite puhul peab kasutaja nimimõõtude väärtused ja andurite ümberarvestuskoefitsiendid kindlaks määrama katseliselt, teostades kalibreerimise.
Muudetud parameetrite salvestamiseks vajutage nuppu "OK". Uued parameetrid salvestatakse faili ja neid kasutatakse edasistes mõõtmistes.
1.2 Rootori radiaalse kõikumise mõõtmine
Rotori radiaalset kõikumist saab mõõta kontaktivabalt lähedusandurid kahes tasapinnas vastavalt joonisel 3 näidatud skeemile. Ajafunktsiooni ja vajaduse korral ka rootori kõikumisspektri mõõtmiseks ja graafikule kandmiseks tuleb teha mitmeid ettevalmistavaid toiminguid, sealhulgas:
- - valida rootori diameetrilised lõigud, kus mõõtmised teostatakse;
- paigaldada kontaktivabad lineaarsed nihkesensorid 5 ja 6 ning faas kallakusensor 7 masina alusele spetsiaalsete seadmete (nt magnetkolmikjalgade) abil;
- ühendage lineaarliikumise lähedusandurid mõõteseadme pistikupesadega X1 ja X2 ning faasinurgaandur pistikupesaga X3;
- - määrata iga lineaarkodeerija jaoks nominaalne mõõtevahe ∆ rootoripinna ja andurelemendi vahel (terasest valmistatud rootori puhul ∆ = 3,5 mm);
- paigaldage rootorile faasinurgaanduri 7 käivitamiseks vajalik peegeldav märk ja kontrollige anduri käivitumist;
- ühendage mõõteseade arvutiga.
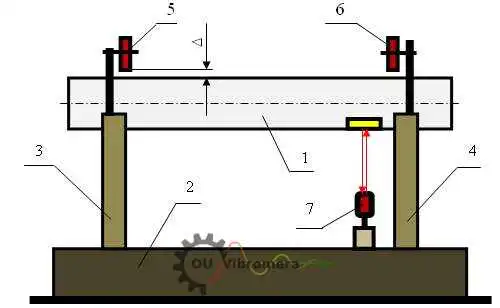
Joonis 3. Rootori radiaalse viskumise mõõtmine
Kui vajutate põhitööaknas (vt joonis 1) nuppu "F8 - graafikud", kuvatakse arvuti ekraanil tööaken "Graafikud" (vt joonis 5), mis on mõeldud eri liiki graafikute koostamiseks rootori radiaalse väljavoolu kohta.
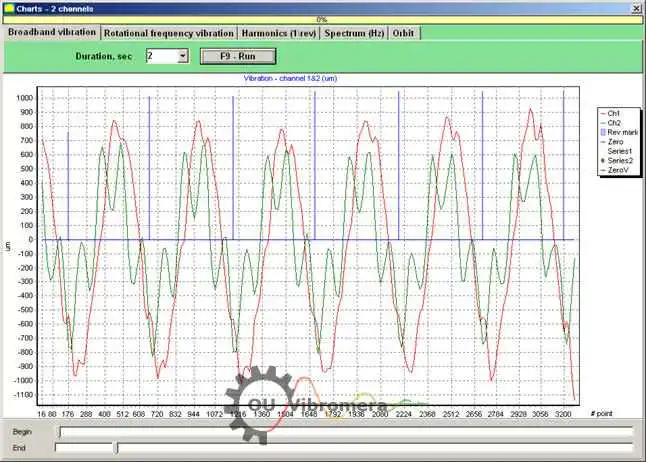
Joonis 5. Tööaken režiimis "Diagrammid".
Selle akna nupud loovad järgmised graafikud:
- Kui vajutate selles aknas nuppu "Broadband vibration", kuvatakse rootori radiaalse jooksu ajafunktsioon.
- Kui vajutatakse nuppu "Pöörlemissageduse vibratsioon", kuvatakse rootori radiaalse läbisõidu pöördkomponendi ajafunktsioon.
- Kui vajutate nuppu "Harmoonilised (1/rev)", kuvatakse ekraanil rootori läbivusgraafik harmooniliste jadade kaupa. Esimene harmooniline vastab võnkumise väärtusele pöördrootori sagedusel (1x), teine - kahekordsel sagedusel (2x) jne.
- Vajutades nuppu "Spektri (Hz)", kuvatakse ekraanil rootori radiaalse läbisõidu spektri.
- Nupule "Orbit" vajutades kuvatakse rootori orbiidi (pretsessiooni) graafik.
1.3 Rotori orbiidi graafiku koostamine
Rootori orbiidi graafiku konstrueerimine võib toimuda vastavalt joonisel 6 esitatud skeemile.

Joonis 6. Rootori orbiidi mõõtmise skeem 1a - rootor (otsevaade); 1b - rootor (külgvaade); 2, 3 - mittekontaktandurid; 4 - faasinurgaanduri peegeldusmärk.
Mõõtmiste tegemiseks ja vastava graafiku koostamiseks on vaja teha mitmeid ettevalmistavaid toiminguid, sealhulgas:
- - paigaldada kontaktivabad lineaarkoodrid 2 ja 3 ühte rootori diameetrilisest osast 90° nurga all üksteise suhtes, tingimusel et kodeerija 2 mõõtmistelg peab langema kokku X-teljega ja kodeerija 3 mõõtmistelg peab langema kokku Y-teljega;
- set the nominal measuring gap ∆x (∆y) between the rootor surface and the sensing element of each linear encoder (for steel ∆ = 3.5 mm);
- - asetage faasinurkade andur (skeemil ei ole näidatud) X-Z-tasandisse, mis langeb kokku puutumatu anduri 2 paigaldustasandiga;
- paigaldada rootorile 1 X–Z-tasandil peegeldav märk 4, mis on vajalik faasinurgaanduri tööks;
- - ühendage kontaktivabad lineaarkoodrid 2 ja 3 pistikutesse X1 ja X2 ning faasinurkade kodeerija mõõteseadme pistikusse X3;
- ühendage mõõteseade arvutiga.
Rotori orbiidi mõõtmise alustamiseks peaaknas (vt joonis 1) vajutage nuppu „F8 – Graafikud“ ja minge tööaknasse „Graafikud“ (vt joonis 5), mis on mõeldud rotori radiaalse kõikumise erinevate graafikute koostamiseks. Selles tööaknas tuleb vajutada nuppu „Orbit”, mille järel ilmub arvuti ekraanile tööaken, kus tehakse vajalik mõõtetsükkel (vt joonis 7).

Joonis 7. Rootori orbiidi graafik. Balanset tarkvara.
To continue the work in the specified working window (see Fig. 7) you must turn on the rootor rotation and by pressing the “F9 – RUN” button perform measurement of the instantaneous values of radial viskumine of the rootor Sxi and Syi for a period equal to one rootor revolution.
The array of instantaneous values Sxi and Syi obtained during measurement is used to plot the orbit of the controlled rootor (each i-th point of the orbit has the coordinates Sxi, Syi). The instantaneous radial displacement magnitude is calculated by the formula:
S∑i = √ (Sxi² + Syi²) (1)
where S∑i is the instantaneous value of the radial displacement magnitude (the length of the radius vector of the rootor orbit), calculated for the i-th point of the graph;
- Sxi – instantaneous value of the radial viskumine of the rootor, measured along the X axis with sensor 2 (see Fig. 6) in the i-th point;
- Syi – instantaneous value of the rootor radial viskumine, measured along the Y axis with sensor 3 (see Fig. 6) in the i-th point.