Måling av relativ rotorsvingning ved hjelp av berøringsfrie lineære posisjonssensorer
With the Balanset-1A du kan måle den relative vibrasjon av rotor ved hjelp av berøringsfrie lineære målere.
1.1 Valg av sensortype og innstilling
Avhengig av oppgaven kan man bruke enten vibrasjonssensorer eller posisjonssensorer til målingene. For å velge sensortype må man i panelet «Sensortype» (nederst i hovedvinduet) merke av i feltet «Vibro» eller «Lineær».
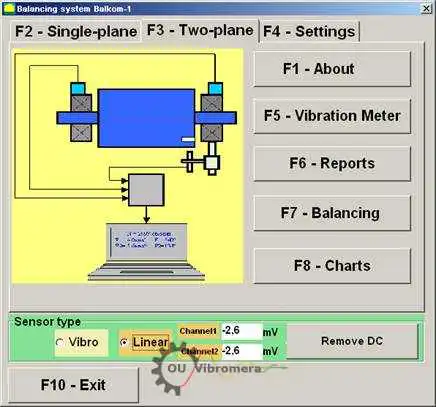
Fig. 1. Hovedarbeidsvinduet i Balanset-programmet.
Før du starter målingen, må du kontrollere at omregningskoeffisientene for sensorene er riktig innstilt. Dette gjøres ved å trykke på knappen "F4-Settings" i programmets hovedarbeidsvindu (se fig. 1) og gå til innstillingsvinduet som er beregnet på å angi konverteringskoeffisienter (se fig. 2).
I arbeidsvinduet som vises i fig. 2, skal konverteringskoeffisientene for lineære sensorer og vibrasjonssensorer legges inn i de tilsvarende feltene. Disse koeffisientene er angitt i instrumentpasset. Vanligvis trenger du ikke å endre dem.
For the linear forskyvning For sensorene som brukes i Balanset-1A-instrumentet, er omregningskoeffisientene henholdsvis:
- Kprl1= 0,94 mV/μm (konverteringskoeffisient for sensoren i 1. kanal);
- Kprl2 = 0,94 mV/μm (konverteringskoeffisient for sensoren i den andre kanalen.
For at den lineære enkoderen skal fungere korrekt, må den monteres i en viss avstand fra måleobjektets overflate. Den nominelle avstanden mellom overflaten og enden av sensoren er 3,5 mm. I dette tilfellet er det en konstant spenning på 2,48 volt på sensorutgangen. Denne spenningen vises i feltene "Channel1" og "Channel2" for henholdsvis første og andre kanal.
For å kompensere for dette må du trykke på knappen "Remove DC". En liten gjenværende forskyvning vil ikke forstyrre målingen.
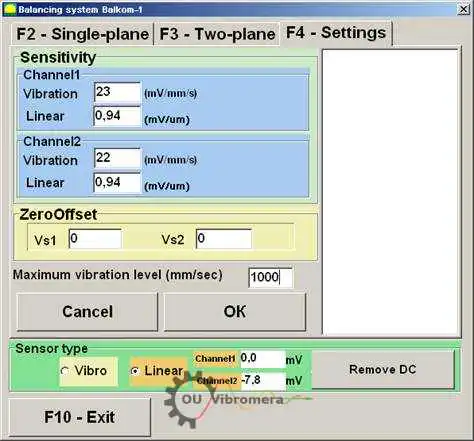
Fig. 2. Arbeidsvindu for inntasting av konverteringskoeffisienter og valg av type sensorer som skal brukes
Viktig! De angitte verdiene for nominell klaring og omregningsfaktorene for de lineære enkoderne gjelder for rotorer av stål. For rotorer av andre metaller (kobber, bronse, aluminium) bør brukeren selv fastsette den nominelle klaringen og sensorens omregningskoeffisienter ved å gjennomføre en kalibrering.
Trykk på "OK"-knappen for å lagre de endrede parametrene. De nye parametrene lagres i en fil og brukes til videre målinger.
1.2 Måling av rotorens radiale kast
Rotorens radiale slingring kan måles berøringsfritt nærhetsprober i to plan i henhold til oppsettet vist i fig. 3. For å kunne måle og plotte tidsfunksjonen og spekteret for rotorens radiale kast må det om nødvendig utføres en rekke forberedende operasjoner, blant annet:
- - velg diametrale seksjoner av rotoren der målingene skal utføres;
- for å montere berøringsfrie lineære posisjonssensorer 5 og 6 og fase vinkelsensor 7 på maskinunderstellet ved hjelp av spesialutstyr (f.eks. magnetiske stativer);
- Koble nærhetssensorene for lineær bevegelse til kontaktene X1 og X2, og fasevinkelsensoren til kontakten X3 på måleenheten;
- - angi en nominell måleavstand ∆ mellom rotoroverflaten og følerelementet for hver lineærgiver (for en rotor av stål er ∆ = 3,5 mm);
- Plasser det refleksmerket som kreves for utløsning av fasevinkelsensoren 7 på rotoren, og kontroller sensorens utløsning;
- Koble måleenheten til datamaskinen.
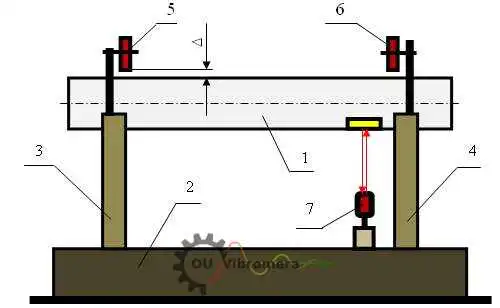
Fig. 3. Måling av rotorens radiale kast
Hvis du trykker på knappen "F8 - Diagrammer" i hovedarbeidsvinduet (se fig. 1), viser dataskjermen arbeidsvinduet "Grafer" (se fig. 5), som er utformet for å lage ulike typer grafer over rotorens radiale utløp.
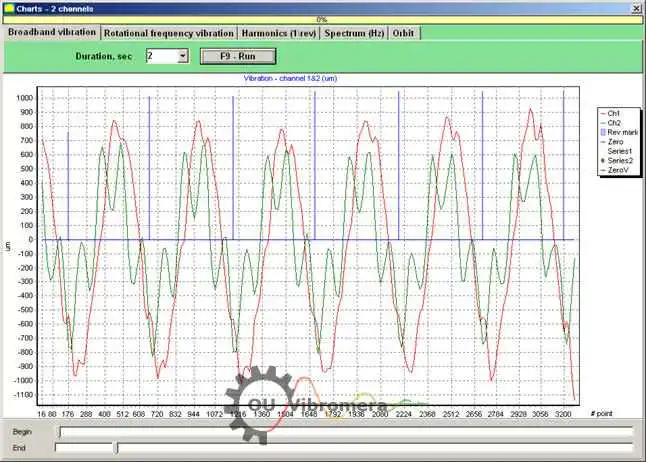
Fig. 5. Arbeidsvinduet i modusen "Diagrammer".
Knappene i dette vinduet brukes til å lage følgende grafer:
- Når du trykker på knappen "Bredbåndsvibrasjon" i dette vinduet, vises tidsfunksjonen for rotorens radialutslag.
- Hvis du trykker på knappen "Rotasjonsfrekvensvibrasjon", vises tidsfunksjonen til den reciprokke komponenten av rotorens radialutslag.
- Hvis du trykker på knappen "Harmonics (1/rev)", vil displayet vise en graf som deler opp rotorutslaget i en harmonisk serie. Den første harmoniske svarer til vibrasjonsverdien ved omvendt rotorfrekvens (1x), den andre - ved dobbel frekvens (2x) osv.
- Ved å trykke på knappen "Spectrum (Hz)" viser displayet spekteret av rotorens radiale utløp.
- Ved å trykke på knappen "Orbit" vises grafen for rotorens bane (presesjon).
1.3 Oppbygging av rotorbanediagrammet
Konstruksjonen av rotorbanegrafen kan utføres i henhold til skjemaet vist i figur 6.

Fig. 6. Skjema for måling av rotorens bane 1a - rotor (sett fra enden); 1b - rotor (sett fra siden); 2, 3 - berøringsfrie sensorer; 4 - refleksjonsmerke for fasevinkelsensoren.
For å kunne foreta en måling og lage en tilsvarende graf, er det nødvendig å utføre en rekke forberedende operasjoner, blant annet:
- - monter de berøringsfrie lineære enkoderne 2 og 3 i en av rotorens diametrale seksjoner i en vinkel på 90° i forhold til hverandre, forutsatt at måleaksen til enkoder 2 må falle sammen med X-aksen og måleaksen til enkoder 3 må falle sammen med Y-aksen;
- sett det nominelle målegapet ∆x (∆y) mellom rotoroverflaten og følerelementet til hver lineære enkoder (for stål ∆ = 3.5 mm);
- - plasser fasevinkelsensoren (ikke vist i skjemaet) i X - Z-planet, sammenfallende med installasjonsplanet til berøringsfri sensor 2;
- plassere et refleksmerke 4 på rotoren 1 i X–Z-planet, noe som er nødvendig for at fasevinkelsensoren skal fungere;
- - Koble de berøringsfrie lineære enkoderne 2 og 3 til kontaktene X1 og X2, og fasevinkelgiveren til kontakten X3 på måleenheten;
- Koble måleenheten til datamaskinen.
For å starte målingen av rotorens bane i hovedarbeidsvinduet (se fig. 1), trykk på knappen «F8 – Diagrammer» og gå til arbeidsvinduet «Grafer» (se fig. 5), som er beregnet på å lage ulike typer grafer over rotorens radiale slingring. I dette arbeidsvinduet må du trykke på knappen «Orbit», hvoretter arbeidsvinduet vises på dataskjermen, der den nødvendige målesyklusen utføres (se fig. 7).

Fig. 7. Graf over rotorens bane. Balanset-programvare.
For å fortsette arbeidet i det angitte arbeidsvinduet (se fig. 7) må du slå på rotorrotasjonen og ved å trykke på knappen “F9 – RUN” utføre måling av øyeblikksverdiene for rotorens radialkast Sxi og Syi for en periode lik én rotoromdreining.
Arrayet med øyeblikksverdier Sxi og Syi som oppnås under målingen, brukes til å plotte banen til den kontrollerte rotoren (hvert i-te punkt på banen har koordinatene Sxi, Syi). Den øyeblikkelige størrelsen på radial forskyvning beregnes med formelen:
S∑i = √ (Sxi² + Syi²) (1)
der S∑i er øyeblikksverdien av størrelsen på den radiale forskyvningen (lengden på radiusvektoren for rotorbanen), beregnet for det i-te punktet i grafen;
- Sxi – øyeblikksverdi av rotorens radialkast, målt langs X-aksen med sensor 2 (se fig. 6) i det i-te punktet;
- Syi – øyeblikksverdi av rotorens radialkast, målt langs Y-aksen med sensor 3 (se fig. 6) i det i-te punktet.