Balanset-1A를 사용하면 비접촉식 리니어 엔코더를 사용하여 로터의 상대 진동을 측정할 수 있습니다.
1.1 센서 유형 및 설정 선택.
작업에 따라 진동 센서 또는 변위 센서를 측정에 사용할 수 있습니다.
센서 유형을 선택하려면 "센서 유형"(기본 창 하단에 있는) 패널에서 "진동" 또는 "선형" 필드에 표시를 해야 합니다.
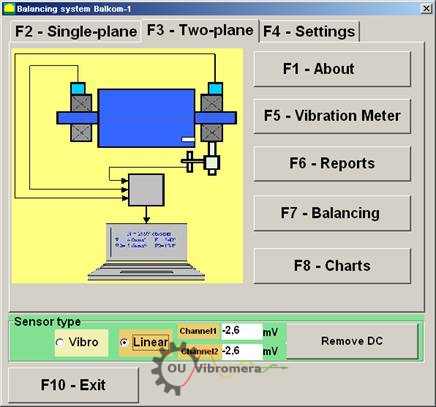
그림 1. Balanset 프로그램의 기본 작업 창.T
측정을 시작하기 전에 센서의 변환 계수가 올바르게 설정되어 있는지 확인해야 합니다. 이를 위해 프로그램의 기본 작업 창(그림 1 참조)에서 "F4-설정" 버튼을 누르고 변환 계수를 입력하도록 설계된 설정 창으로 이동합니다(그림 2 참조).
그림 2에 표시된 작업 창에서 해당 필드에 선형 및 진동 센서의 변환 계수를 입력해야 합니다. 이 계수는 계기 여권에 명시되어 있습니다. 일반적으로 변경할 필요가 없습니다.
Balanset-1A 기기 세트에 사용되는 선형 변위 센서의 경우 변환 계수는 각각 다음과 같습니다:
Kprl1= 0.94mV/μm(1채널 센서의 변환 계수);
Kprl2 = 0.94mV/μm(두 번째 채널 센서의 변환 계수).
올바른 작동을 위해 선형 인코더는 측정 대상 표면에서 일정 거리를 두고 설치해야 합니다. 표면과 센서 끝 사이의 공칭 간격은 3.5mm입니다. 이 경우 센서 출력에 2.48볼트의 정전압이 있습니다. 이 전압은 첫 번째 및 두 번째 채널에 대해 각각 "채널1" 및 "채널2" 필드에 표시됩니다.
이를 보정하려면 "DC 제거" 버튼을 눌러야 합니다. 작은 잔여 오프셋은 측정에 방해가 되지 않습니다.
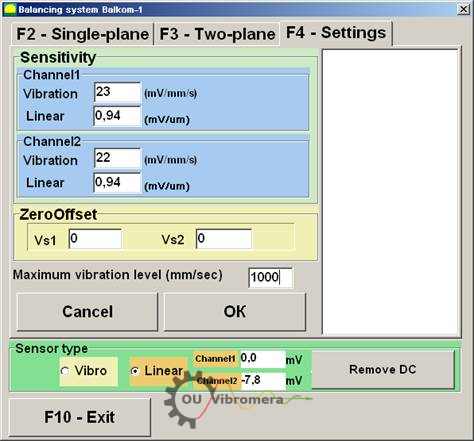
그림 2. 변환 계수 입력 및 사용 센서 유형 선택을 위한 작업 창
주목!
강철로 만들어진 로터에 대해 지정된 공칭 안전거리 값과 선형 엔코더의 변환 계수가 제공됩니다.
다른 금속(구리, 청동, 알루미늄)으로 만들어진 로터의 경우 공칭 간극 및 센서 변환 계수는 사용자가 캘리브레이션을 수행하여 실험적으로 결정해야 합니다.
변경된 파라미터를 저장하려면 "확인" 버튼을 누릅니다. 새 매개변수는 파일에 저장되어 추후 측정에 사용됩니다.
1.2 로터의 반경 방향 런아웃 측정.
로터의 방사형 런아웃은 그림 3에 표시된 방식에 따라 두 평면에서 비접촉식 프로브를 사용하여 측정할 수 있습니다.
시간 함수 및 로터 런아웃 스펙트럼을 측정하고 플롯하려면 필요한 경우 다음과 같은 여러 가지 준비 작업을 수행해야 합니다:
- 측정이 수행될 로터의 직경 섹션을 선택합니다;
- 특수 장치(예: 마그네틱 삼각대)를 사용하여 비접촉식 선형 변위 센서 5와 6 및 위상각 센서 7을 기계 베드에 설치합니다;
- 선형 동작의 근접 센서는 커넥터 X1 및 X2에, 위상각 센서는 측정 장치의 커넥터 X3에 연결합니다;
- 각 선형 인코더의 로터 표면과 감지 요소 사이에 공칭 측정 간격 ∆을 설정합니다(강철로 만들어진 로터의 경우 ∆ = 3.5mm);
- 위상각 센서(7)의 트리거링에 필요한 반사 표시를 로터 위에 놓고 센서 트리거링을 확인합니다;
- 측정 장치를 컴퓨터에 연결합니다.
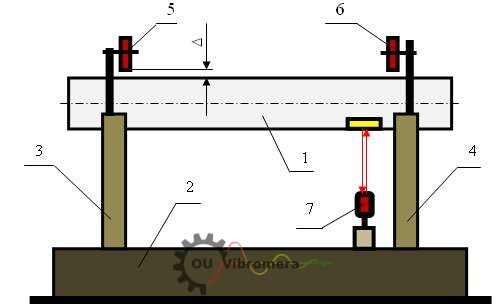
그림 3. 로터의 방사형 런아웃 측정
기본 작업 창(그림 1 참조)에서 "F8 - 차트" 버튼을 누르면 컴퓨터 디스플레이에 로터의 방사형 런아웃에 대한 다양한 종류의 그래프를 작성하도록 설계된 "그래프"(그림 5 참조) 작업 창이 표시됩니다.
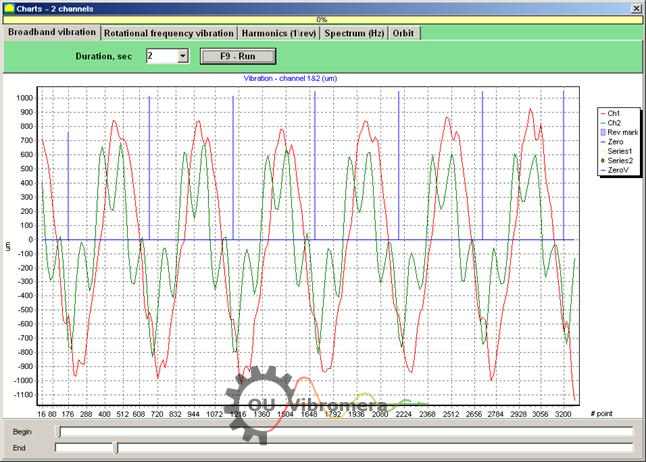
그림 5. "차트" 모드의 작업 창
이 창에서 "광대역 진동" 버튼을 누르면 로터 방사형 런아웃의 시간 기능이 표시됩니다.
"회전 주파수 진동" 버튼을 누르면 로터 방사형 런아웃의 역성분 시간 함수가 표시됩니다.
"고조파(1/rev)" 버튼을 누르면 디스플레이에 로터 런아웃이 고조파 계열로 분해된 그래프가 표시됩니다. 첫 번째 고조파는 역방향 로터 주파수(1x)에서의 진동 값, 두 번째 고조파는 이중 주파수(2x) 등에서 진동 값에 해당합니다.
"스펙트럼(Hz)" 버튼을 누르면 디스플레이에 로터의 방사형 런아웃 스펙트럼이 표시됩니다.
"궤도" 버튼을 누르면 로터 궤도(프리세션) 그래프가 표시됩니다.
1.3 로터 궤도 그래프 구성.
로터 궤도 그래프의 구성은 그림 6에 표시된 방식에 따라 수행할 수 있습니다.

그림 6. 로터 궤도 측정 방식 1a - 로터(단면도), 1b - 로터(측면도), 2, 3 - 비접촉 센서, 4 - 위상각 센서의 반사 표시.
측정을 하고 해당 그래프를 작성하려면 다음과 같은 여러 가지 준비 작업을 수행해야 합니다:
- 인코더 2의 측정 축이 X축과 일치하고 인코더 3의 측정 축이 Y축과 일치해야 한다는 조건 하에 로터의 직경 섹션 중 하나에 비접촉식 리니어 인코더 2 및 3을 서로 90° 각도로 설치합니다;
- 로터 표면과 각 선형 엔코더의 감지 요소 사이의 공칭 측정 간격 ∆x(∆u)를 설정합니다(스틸의 경우 ∆ = 3.5mm);
- 비접촉 센서 2의 설치 평면과 일치하는 X-Z 평면에 위상각 센서(도식에는 표시되지 않음)를 설정합니다;
- 위상각 센서 작동에 필요한 X-Z 평면의 로터 1에 반사 마크 4를 설정합니다;
- 비접촉식 리니어 엔코더 2와 3을 커넥터 X1 및 X2에 연결하고 위상각 엔코더를 측정 장치의 커넥터 X3에 연결합니다;
- 측정 장치를 컴퓨터에 연결합니다.
기본 작업 창에서 로터 궤도 측정을 시작하려면 다음과 같이 하세요(그림 1 참조).
"F8-차트" 버튼을 누르고 로터의 방사형 런아웃에 대한 다양한 종류의 그래프를 작성하도록 설계된 작업 창 "그래프"(그림 5 참조)로 이동합니다.
이 작업 창에서 "궤도" 버튼을 누르면 컴퓨터 디스플레이에 작업 창이 나타나고 필요한 측정 주기가 수행됩니다(그림 7 참조).
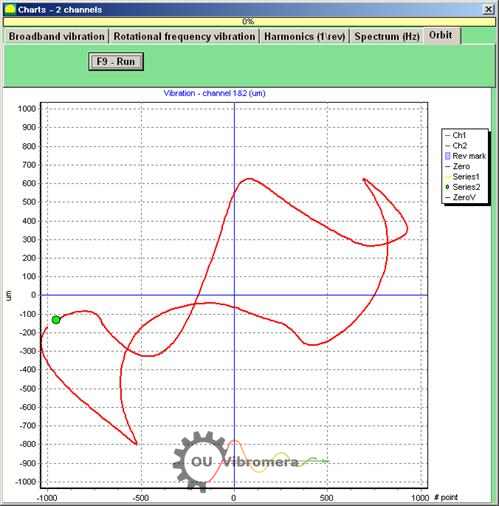
그림 7. 로터 궤도 그래프. 발란셋 소프트웨어.
지정된 작업 창(그림 7 참조)에서 작업을 계속하려면 로터 회전을 켜고 "F9 - RUN" 버튼을 눌러 한 번의 로터 회전과 동일한 기간 동안 로터 Sxi 및 Sui의 방사형 런아웃의 순간값을 측정해야 합니다.
측정 중에 얻은 순간 값 Sxi 및 Sui의 배열은 공식에 의해 수행되는 제어 로터의 궤도 좌표를 계산하는 데 사용됩니다:
S∑i = √ (Sxi² + Syi²) (1)
여기서 S∑i는 그래프의 i번째 지점에 대해 계산된 로터 궤도 좌표의 순간 값입니다;
Sxi - 로터의 방사형 런아웃의 순간 값으로, i번째 지점에서 센서 1의 좌표 X로 측정합니다;
Sxi - 로터 방사형 런아웃의 순간 값으로, i번째 지점에서 센서 2를 사용하여 좌표 Y로 측정합니다.