Uravnoteženje pogonske gredi: celovit vodnik
Devices for Dynamic Balancing of Driveshafts and Measurement System for Balancing Machines Balanset-4A – €6,803
Predstavljajte si, da vozite tovornjak in nenadoma začutite ostre vibracije ali slišite glasen zvok pri pospeševanju ali prestavljanju. To ni le nadloga – lahko je znak neuravnotežene pogonske gredi. Za inženirje in tehnike takšne vibracije in hrup kažejo na izgubo učinkovitosti, pospešeno obrabo komponent in potencialno drage izpade, če se jih ne odpravi.
V tem obsežnem priročniku ponujamo praktične rešitve za težave z uravnoteženjem kardanske gredi. Spoznali boste, kaj je kardanska gred in zakaj jo je treba uravnotežiti, prepoznali boste pogoste okvare, ki povzročajo vibracije ali hrup, in sledili jasnemu postopku dinamičnega uravnoteženja kardanske gredi po korakih. Z uporabo teh najboljših praks lahko prihranite denar pri popravilih, skrajšate čas odpravljanja težav in zagotovite, da vaš stroj ali vozilo deluje zanesljivo z minimalnimi vibracijami.
Kazalo vsebine
- 1. Vrste pogonskih gredi
- 2. Napake pogona z univerzalnim sklepom
- 3. Izravnava pogonske gredi
- 4. Sodobni balansirni stroji za pogonske gredi
- 5. Priprava na uravnoteženje pogonske gredi
- 6. Postopek uravnoteženja pogonske gredi
- 7. Priporočeni razredi točnosti uravnoteženja za toge rotorje
1. Vrste pogonskih gredi
Pogon univerzalnega sklepa (pogonska gred) je mehanizem, ki prenaša navor med gredmi, ki se križajo v središču univerzalnega sklepa in se lahko med seboj premikajo pod kotom. V vozilu pogonska gred prenaša navor od menjalnika (ali prenosne enote) na pogonski osi v primeru klasičnega ali štirikolesnega pogona. Pri vozilih s pogonom na vsa kolesa univerzalni sklep običajno povezuje pogonsko gred menjalnika s pogonsko gredjo menjalnika, pogonski gredi menjalnika pa s pogonskimi gredmi glavnih pogonov pogonskih osi.
Enote, nameščene na okvirju (kot sta menjalnik in razdelilno ohišje), se lahko zaradi deformacije svojih nosilcev in samega okvirja premikajo druga glede na drugo. Medtem so pogonske osi pritrjene na okvir prek vzmetenja in se lahko zaradi deformacije elastičnih elementov vzmetenja premikajo glede na okvir in enote, nameščene na njem. To gibanje lahko spremeni ne le kote pogonskih gredi, ki povezujejo enote, temveč tudi razdaljo med enotami.
The universal joint drive has a significant disadvantage: the non-uniform rotation of the shafts. If one shaft rotates uniformly, the other does not, and this non-uniformity increases with the angle between the shafts. This limitation prevents the use of a universal joint drive in many applications, such as in the transmission of front-wheel-drive vehicles, where the main issue is transmitting torque to the turning wheels. This disadvantage can be partially compensated by using two universal joints on one shaft, set to equal joint angles (γ1 = γ2) with the yokes at both ends of the intermediate shaft in the same plane (in phase). Yokes phased 90° apart do not cancel the fluctuation — they add to it. However, in applications requiring uniform rotation, constant velocity joints (CV joints) are typically used instead. CV joints are a more advanced but also more complex design serving the same purpose.
Pogoni z univerzalnim sklepom so lahko sestavljeni iz enega ali več univerzalnih sklepov, povezanih s pogonskimi gredmi in vmesnimi nosilci.

Slika 1. Shema pogona z univerzalnim sklepom: 1, 4, 6 - pogonske gredi; 2, 5 - univerzalni sklepi; 3 - kompenzacijski priključek; u1, u2 - koti med gredmi
Na splošno je pogon univerzalnega zgloba sestavljen iz univerzalnih zglobov 2 in 5, pogonskih gredi 1, 4 in 6 ter kompenzacijske povezave 3. Včasih je pogonska gred nameščena na vmesnem nosilcu, pritrjenem na prečni nosilec okvirja vozila. Univerzalni zglobi zagotavljajo prenos navora med gredmi, katerih osi se sekajo pod kotom. Univerzalni zglobi so razdeljeni na zglobe z neenakomerno in konstantno hitrostjo. Zglobi z neenakomerno hitrostjo so nadalje razvrščeni v elastične in toge. Zglobi z konstantno hitrostjo so lahko kroglični z delilnimi utori, kroglični z delilno ročico in odmični. Običajno so nameščeni v pogonu vodilnih krmiljenih koles, kjer lahko kot med gredmi doseže 45°, središče univerzalnega zgloba pa mora sovpadati s presečiščem vrtilnih osi kolesa in njegove osi obračanja.
Elastic universal joints transmit torque between shafts with intersecting axes at an angle of 2...3° due to the elastic deformation of the connecting elements. A rigid non-uniform velocity joint transmits torque from one shaft to another through the movable connection of rigid parts. It consists of two yokes – 3 and 5, into the cylindrical holes of which the ends A, B, C, and D of the connecting element – the cross 4, are installed on bearings. The yokes are rigidly connected to shafts 1 and 2. Yoke 5 can rotate around axis B–D of the cross and at the same time, along with the cross, rotate around axis A–C, thereby enabling the transmission of rotation from one shaft to another with a changing angle between them.

Slika 2. Shema togega univerzalnega sklepa z neenakomerno hitrostjo
If shaft 1 rotates around its axis by an angle α, then shaft 2 will rotate by an angle β over the same period. The relationship between the rotation angles of shafts 1 and 2 is determined by the expression tanα = tanβ * cosγ, where γ is the angle at which the axes of the shafts are positioned. This expression indicates that the angle β is sometimes less than, equal to, or greater than angle α. Equality of these angles occurs every 90° of rotation of shaft 1. Therefore, with uniform rotation of shaft 1, the angular velocity of shaft 2 is non-uniform and varies according to a sinusoidal law. The non-uniformity of shaft 2's rotation becomes more significant as the angle γ between the shaft axes increases.
Če se neenakomerna rotacija gredi 2 prenese na gredi enot, se pri prenosu pojavijo dodatne pulzirajoče obremenitve, ki se povečujejo s kotom γ. Da bi preprečili prenos neenakomerne rotacije gredi 2 na gredi enot, sta v pogonu z univerzalnim sklepom uporabljena dva univerzalna sklepa. Vgrajena sta tako, da sta kota γ1 in γ2 enaka; vilici univerzalnih sklepov, pritrjeni na neenakomerno vrtečo se gred 4, morata biti nameščeni v isti ravnini.
Zasnova glavnih delov pogona kardanskega zgloba je prikazana na sliki 3. Kardanski zglob z neenakomerno hitrostjo je sestavljen iz dveh jarmov (1), ki sta povezana s križem (3). Eden od jarmov ima včasih prirobnico, drugi pa je privarjen na cev pogonske gredi ali ima utorni konec (6) (ali pušo) za povezavo s pogonsko gredjo. Čepki križa so nameščeni v ušesih obeh jarmov na igličnih ležajih (7). Vsak ležaj je nameščen v ohišju (2) in je v ušesu jarma pritrjen s pokrovčkom, ki je na jaram pritrjen z dvema vijakoma, ki ju zaklepata jezička na podložki. V nekaterih primerih so ležaji v jarmih pritrjeni z varovalnimi obroči. Za zadrževanje maziva v ležaju in zaščito pred vodo in umazanijo je nameščeno gumijasto samozatezno tesnilo. Notranja votlina križa je napolnjena z mastjo skozi mazalko, ki doseže ležaje. Križ ima običajno varnostni ventil, ki ščiti tesnilo pred poškodbami zaradi tlaka masti, ki se črpa v križ. Utorna povezava (6) se maže z mazalko (5).

Slika 3. Podrobnosti togega univerzalnega sklepa z neenakomerno hitrostjo
The maximum angle between the axes of shafts connected by rigid non-uniform velocity universal joints usually does not exceed 20°, as efficiency significantly decreases at larger angles. If the angle between the shaft axes varies within 0...2°, the trunnions of the cross are deformed by the needle bearings, causing the universal joint to fail quickly.
V menjalnikih visokohitrostnih goseničnih vozil se pogosto uporabljajo univerzalni zglobi z zobniškimi sklopkami, ki omogočajo prenos navora med gredmi z osmi, ki se sekajo pod koti do 1,5...2°.
Pogonske gredi so običajno izdelane cevno, iz posebnih jeklenih brezšivnih ali varjenih cevi. Na cevi so privarjeni jermeni kardanskih zglobov, drsne tuljave ali konice. Za zmanjšanje prečnih obremenitev, ki delujejo na pogonsko gred, se dinamično uravnoteženje izvede pri sestavljenih univerzalnih členih. Neuravnoteženost se odpravi z varjenjem izravnalnih plošč na pogonsko gred ali včasih z namestitvijo izravnalnih plošč pod ležajne pokrove kardanskih zglobov. Relativni položaj delov sprednjega spoja po sestavi in uravnoteženju pogona univerzalnega sklepa v tovarni je običajno označen s posebnimi nalepkami.
Kompenzacijski priključek pogona univerzalnega sklepa je običajno izveden v obliki drsnega priključka, ki omogoča aksialno gibanje delov pogona univerzalnega sklepa. Sestavljen je iz narebrene konice, ki se prilega narebreni tuljavi pogona univerzalnega sklepa. Mazivo se v drsni priključek vnaša skozi mazalni nastavek ali pa se uporabi med montažo in se zamenja po daljši uporabi vozila. Običajno sta vgrajena tesnilo in pokrov, ki preprečujeta uhajanje in onesnaženje z mastjo.
Pri dolgih pogonskih gredeh se pri pogonih z univerzalnim sklepom običajno uporabljajo vmesne podpore. Vmesna opora je običajno sestavljena iz nosilca, privitega na prečni nosilec okvirja vozila, v katerem je v gumijastem elastičnem obroču nameščen kroglični ležaj. Ležaj je na obeh straneh zatesnjen s pokrovčki in ima napravo za mazanje. Elastični gumijasti obroček pomaga izravnavati netočnosti pri montaži in neskladnost ležaja, do katerih lahko pride zaradi deformacij okvirja.
Univerzalni sklep z igličnimi ležaji (slika 4a) je sestavljen iz jarma, križa, igličnih ležajev in tesnil. Mišice z igličnimi ležaji so nameščene na stebričke križa in zatesnjene s tesnili. Skodelice so v jermenih pritrjene z zaskočnimi obročki ali pokrovčki, pritrjenimi z vijaki. Univerzalni spoji se mažejo z mazalnim nastavkom prek notranjih vrtin v križu. Varnostni ventil se uporablja za odpravo prevelikega pritiska olja v spoju. Med enakomernim vrtenjem gonilnega jarma se pogonski jarem vrti neenakomerno: dvakrat na obrat napreduje in zaostaja za gonilnim jarmom. Za odpravo neenakomernega vrtenja in zmanjšanje vztrajnostnih obremenitev se uporabljata dva univerzalna sklepa.
Pri pogonu na sprednja pogonska kolesa so vgrajeni kardanski sklepi s konstantno hitrostjo. Pogon stalnega hitrega univerzalnega sklepa vozil GAZ-66 in ZIL-131 sestavljajo jarma 2, 5 (slika 4b), štiri kroglice 7 in osrednja kroglica 8. Pogonski jarm 2 je integriran z notranjo osno gredjo, pogonski jarm pa je skovan z zunanjo osno gredjo, na koncu katere je pritrjeno pesto kolesa. Pogonski moment z jarma 2 na jarem 5 se prenaša prek kroglic 7, ki se premikajo po okroglih utorih v jarmih. Osrednja kroglica 8 služi za centriranje jarmov in jo na mestu držita čepi 3 in 4. Frekvenca vrtenja jarmov 2 in 5 je enaka zaradi simetričnosti mehanizma glede na jarma. Sprememba dolžine gredi je zagotovljena s prostimi drsnimi spoji jarmov z gredjo.

Slika 4. Univerzalni sklepi: a - univerzalni sklep: 1 - pokrovček; 2 - skodelica; 3 - iglični ležaj; 4 - tesnilo; 5, 9 - jarma; 6 - varnostni ventil; 7 - križ; 8 - mazalni nastavek; 10 - vijak; b - univerzalni sklep s stalno hitrostjo: 1 - notranja osna gred; 2 - gonilni jarem; 3, 4 - čepi; 5 - gnani jarem; 6 - zunanja osna gred; 7 - kroglice; 8 - centralna kroglica
2. Napake pogona z univerzalnim sklepom
Okvare pogona univerzalnega sklepa se običajno kažejo kot ostri udarci v univerzalnih sklepih, ki se pojavijo med vožnjo vozila, zlasti med prestavljanjem med prestavami in nenadnim povečanjem števila vrtljajev ročične gredi motorja (na primer pri prehodu z zaviranja motorja na pospeševanje). Znak okvare univerzalnega sklepa je lahko njegovo segrevanje na visoko temperaturo (nad 100 °C). To se zgodi zaradi znatne obrabe puše in trnov univerzalnega sklepa, igličnih ležajev, križev in drsnih spojev, kar povzroči nepravilno nastavitev univerzalnega sklepa in znatne udarne osne obremenitve igličnih ležajev. Poškodbe plutovinastih tesnil križa univerzalnega zgloba povzročijo hitro obrabo trna in njegovega ležaja.
Med vzdrževanjem se pogon kardanskega sklepa preveri tako, da se pogonska gred z roko močno zavrti v obe smeri. Stopnja prostega vrtenja gredi določa obrabo kardanskih sklepov in drsnih spojev. Vsakih 8-10 tisoč kilometrov se preveri stanje vijačnih povezav prirobnic pogonske gredi menjalnika in pogonske gredi glavnega menjalnika s prirobnicami končnih kardanskih sklepov ter pritrditev vmesne podpore pogonske gredi. Preveri se tudi stanje gumijastih škornjev na drsnih spojih in plutovinastih tesnil križnega univerzalnega sklepa. Vsi pritrdilni vijaki morajo biti popolnoma zategnjeni (zategovalni moment 8-10 kgf-m).
Iglični ležaji univerzalnih zglobov se mažejo s tekočim oljem, ki se uporablja za menjalnike; drsni spoji v večini vozil se mažejo z mastmi (US-1, US-2, 1-13 itd.); uporaba masti za mazanje igličnih ležajev je strogo prepovedana. V nekaterih vozilih so vijačni spoji namazani z oljem za menjalnike. Vmesni podporni ležaj, nameščen v gumijastem tulcu, praktično ne potrebuje mazanja, saj je namazan med montažo v tovarni. Podporni ležaj vozila ZIL-130 se med rednim vzdrževanjem (vsakih 1100-1700 km) namaže z mastjo prek tlačnega priključka.

Slika 5. Pogon z univerzalnim sklepom: 1 - prirobnica za pritrditev pogonske gredi; 2 - križ univerzalnega sklepa; 3 - jarm univerzalnega sklepa; 4 - drsni jarm; 5 - cev pogonske gredi; 6 - iglični valjčni ležaj z zaprtim koncem
Pogon univerzalnega sklepa je sestavljen iz dveh univerzalnih sklepov z igličnimi ležaji, povezanih z votlo gredjo, in drsnega jarma z vijačnimi zobniki. Za zanesljivo zaščito pred umazanijo in dobro mazanje vpetega spoja je drsni jarm (6), povezan s sekundarno gredjo (2) menjalnika, nameščen v podaljšek (1), pritrjen na ohišje menjalnika. Poleg tega ta lokacija drsnega spoja (zunaj območja med zgloboma) znatno poveča togost pogona z univerzalnim zglobom in zmanjša verjetnost vibracij gredi ob obrabi drsnega drsnega spoja.
Pogonska gred je izdelana iz tankostenske električno varjene cevi (8), v katero sta na vsakem koncu vtisnjena dva enaka jarma (9) in nato varjena z obločnim varjenjem. Ohišja igelnih ležajev (18) križa (25) so vtisnjena v ušesa jarmov (9) in pritrjena z vzmetnimi zadrževalnimi obroči (20). Vsak ležaj univerzalnega zgloba vsebuje 22 igel (21). Na štrleče sornike križev so vtisnjene vtisnjene kapice (24), v katere so nameščeni plutovinasti obroči (23). Ležaji se mažejo s kotno mazalko (17), ki je privita v navojno luknjo v središču križa, povezano s skoznjimi kanali v sornikih križa. Na nasprotni strani križa univerzalnega zgloba je v njegovem središču varnostni ventil (16), ki je zasnovan tako, da sprosti odvečno mast pri polnjenju križa in ležajev ter prepreči kopičenje tlaka v križu med delovanjem (ventil se aktivira pri tlaku približno 3,5 kg/cm²). Potreba po vključitvi varnostnega ventila je posledica dejstva, da lahko prekomerno povečanje tlaka v križu povzroči poškodbo (iztiskanje) plutovinastih tesnil.

Slika 6. Sestava pogonske gredi: 1 - podaljšek menjalnika; 2 - sekundarna gred menjalnika; 3 in 5 - deflektorja umazanije; 4 - gumijasta tesnila; 6 - drsni jarm; 7 - izravnalna plošča; 8 - cev pogonske gredi; 9 - jarm; 10 - prirobnica jarma; 11 - vijak; 12 - prirobnica pogonskega sklopa zadnje osi; 13 - vzmetna podložka; 14 - matica; 15 - zadnja os; 16 - varnostni ventil; 17 - kotni mazalni nastavek; 18 - iglični ležaj; 19 - oko jarma; 20 - vzmetni pritrdilni obroč; 21 - igla; 22 - podložka s toroidnim koncem; 23 - plutovinasti obroč; 24 - štampiljka; 25 - križ
Kardanska gred, sestavljena z obema univerzalnima zgloboma, je na obeh koncih skrbno dinamično uravnotežena z varjenjem uravnoteženih plošč (7) na cev. Zato je treba pri demontaži gredi vse njene dele skrbno označiti, da jih je mogoče ponovno sestaviti v prvotne položaje. Neupoštevanje tega navodila poruši ravnovesje gredi, kar povzroči vibracije, ki lahko poškodujejo menjalnik in karoserijo vozila. Če se posamezni deli obrabijo, zlasti če se cev zaradi udarca upogne in po montaži ni mogoče dinamično uravnotežiti gredi, je treba zamenjati celotno gred.
Možne okvare pogonske gredi, njihovi vzroki in rešitve
| Vzrok okvare | Rešitev |
|---|---|
| Vibracije pogonske gredi | |
| 1. Upogibanje gredi zaradi ovire | 1. Izravnajte in dinamično uravnotežite sestavljeno gred ali zamenjajte sestavljeno gred. |
| 2. Obraba ležaja in križa | 2. Zamenjajte ležaje in križe ter dinamično uravnotežite sestavljeno gred. |
| 3. Obraba razširitvenih puše in drsnega jarma | 3. Zamenjajte podaljšek in drsni jarm ter dinamično uravnotežite sestavljeno gred. |
| Udarci pri zagonu in vožnji po klancu | |
| 1. Obraba drsnih vijakov ali gredi sekundarnega menjalnika | 1. Zamenjajte obrabljene dele. Pri zamenjavi drsnega jarma dinamično uravnotežite sestavljeno gred |
| 2. Sprostite vijake, ki pritrjujejo prirobnični jarm na prirobnico gonilnega mehanizma zadnje osi. | 2. Privijte vijake |
| Izmet olja iz tesnil univerzalnih sklepov | |
| Obraba plutovinastih obročkov v tesnilih univerzalnih sklepov | Zamenjajte plutovinaste obročke in pri sestavljanju ohranite relativni položaj vseh delov pogonske gredi. Če so križi in ležaji obrabljeni, zamenjajte ležaje in križe ter dinamično uravnotežite sestavljeno gred. |
3. Izravnava pogonske gredi
Po popravilu in sestavi pogonske gredi se ta dinamično uravnoteži na stroju. Ena od zasnov balansirnega stroja je prikazana na sliki 7. Stroj sestavljajo plošča (18), okvir nihala (8), nameščen na štiri navpične elastične palice (3), ki zagotavljajo njegovo nihanje v vodoravni ravnini. Na vzdolžne cevi okvirja nihala (8) sta pritrjena nosilec in sprednja glava (9), pritrjena na nosilec (4). Zadnja glava (6) je nameščena na premični tirnici (5), ki omogoča dinamično uravnoteženje pogonskih gredi različnih dolžin. Vretena glavnika so nameščena na natančnih krogličnih ležajih. Vreteno sprednjega vretenika (9) poganja elektromotor, ki je nameščen v podstavku stroja, prek pogona z jermenom in vmesne gredi, na kateri je nameščena okončina (10) (graduirani disk). Poleg tega sta na ploščo stroja (18) nameščeni dve stojali (15) z izvlečnimi zapornimi čepi (17), ki zagotavljata pritrditev sprednjega in zadnjega konca okvirja nihala glede na uravnoteženje sprednjega ali zadnjega konca pogonske gredi.

Slika 7. Stroj za dinamično uravnoteženje pogonskih gredi
1 - objemka; 2 - blažilniki; 3 - elastična palica; 4 - nosilec; 5 - premična traverza; 6 - zadnja glava; 7 - prečnik; 8 - okvir nihala; 9 - sprednja pogonska glava; 10 - kolutni disk; 11 - milivoltmeter; 12 - kolutna gred komutatorja in usmernika; 13 - magnetoelektrični senzor; 14 - fiksno stojalo; 15 - fiksatorsko stojalo; 16 - podpora; 17 - fiksator; 18 - podporna plošča
Na zadnji strani plošče stroja so nameščena fiksna stojala (14), na katerih so nameščeni magnetoelektrični senzorji (13) s palicami, povezanimi s koncema okvirja nihala. Za preprečevanje resonančnih vibracij okvirja so pod nosilci (4) nameščeni blažilniki (2), napolnjeni z oljem.
During dynamic balancing, the driveshaft assembly with the sliding yoke is installed and secured on the machine. One end of the driveshaft is connected by a flange-yoke to the flange of the front driving headstock, and the other end by the support neck of the sliding yoke to the splined sleeve of the rear headstock. Then the ease of rotation of the driveshaft is checked, and one end of the machine's pendulum frame is fixed using the fixator. After starting the machine, the limb of the rectifier is rotated counterclockwise, bringing the millivoltmeter needle to its maximum reading. The millivoltmeter reading corresponds to the magnitude of the imbalance. The millivoltmeter scale is graduated in gram-centimeters or grams of counterweight. Continuing to rotate the rectifier limb counterclockwise, the millivoltmeter reading is brought to zero, and the machine is stopped. Based on the rectifier limb reading, the angular displacement (angle of imbalance displacement) is determined, and by manually rotating the driveshaft, this value is set on the intermediate shaft limb. The welding place of the balancing plate will be on the top of the driveshaft, and the weighted part at the bottom in the correction plane. Then the balancing plate is attached and tied with thin wire at a distance of 10 mm from the weld, the machine is started, and the balance of the driveshaft end with the plate is checked. The imbalance should be no more than 70 g·cm (700 g·mm). Then, releasing one end and securing the other end of the pendulum frame with the fixator stand, dynamic balancing of the other end of the driveshaft is performed according to the technological sequence described above.
Pogonske gredi imajo nekaj funkcij za uravnoteženje. Pri večini delov so osnova za dinamično uravnoteženje podporni vratovi (npr. rotorji elektromotorjev, turbine, vretena, ročične gredi itd.), pri pogonskih gredeh pa so to prirobnice. Med sestavljanjem se v različnih spojih pojavijo neizogibne vrzeli, ki povzročijo neuravnoteženost. Če med uravnoteženjem ni mogoče doseči najmanjše neuravnoteženosti, se gred zavrne. Na natančnost uravnoteženja vplivajo naslednji dejavniki:
- Vrzel v povezavi med pristajalnim pasom prirobnice pogonske gredi in notranjo odprtino vpenjalne prirobnice leve in desne podporne glave;
- Radialni in končni pogrez osnovnih površin prirobnice;
- Reže v tečajih in utornih povezavah. Prisotnost masti v votlini utorne povezave lahko povzroči "plavajoče" neravnovesje. Če to preprečuje doseganje zahtevane natančnosti uravnoteženja, se pogonska gred uravnoteži brez masti.
Nekaterih neravnovesij morda sploh ni mogoče odpraviti. Če se v univerzalnih sklepih pogonske gredi pojavi povečano trenje, se poveča medsebojni vpliv korekcijskih ravnin. Zaradi tega se zmanjšata zmogljivost in natančnost uravnoteženja.
V skladu z OST 37.001.053-74 so določeni naslednji standardi neravnovesja: pogonske gredi z dvema zgloboma (dvonosilne) so uravnotežene dinamično, s tremi (trinosilne) pa so sestavljene z vmesnim nosilcem; prirobnice (jarmi) pogonskih gredi in sklopk, težjih od 5 kg, so statično uravnotežene pred montažo gredi ali sklopke; norme preostalega neravnovesja za pogonske gredi na vsakem koncu ali na vmesnem nosilcu trinosilne pogonske gredi se ocenijo s specifičnim neravnovesjem;
Največja dovoljena specifična norma preostale neravnovesnosti na vsakem koncu gredi ali na vmesnem nosilcu, kot tudi za trizglobne pogonske gredi v katerem koli položaju na uravnoteženju, ne sme presegati: za menjalnike osebnih avtomobilov in majhnih tovornjakov (do 1 t) ter zelo majhnih avtobusov – 6 g-cm/kg, za ostale – 10 g-cm/kg. Največja dovoljena norma preostale neravnovesnosti pogonske gredi ali trizglobne pogonske gredi mora biti zagotovljena na uravnoteženju pri vrtilni frekvenci, ki ustreza njihovim frekvencam v menjalniku pri največji hitrosti vozila.
Note: OST 37.001.053-74 is a Soviet automotive-industry standard from 1974 and is quoted here as a historical reference. In modern terms, 6 g·cm/kg at 3,000 rpm corresponds to about G 19 and 10 g·cm/kg to about G 31 — the OST requirement sits between G 16 and G 40, consistent with the ISO 21940-11 (formerly ISO 1940-1) grades for drive shafts. Specify new work in ISO 21940-11 grades.
Za kardanske gredi in trizglobne kardanske gredi tovornjakov z nosilnostjo 4 t in več, majhnih in velikih avtobusov je dovoljeno zmanjšanje vrtilne frekvence na uravnalnem stojalu na 70% vrtilne frekvence kardanskih gredi pri največji hitrosti vozila. V skladu z OST 37.001.053-74 mora biti vrtilna frekvenca uravnoteženja kardanskih gredi enaka:
nb = (0,7 ... 1,0) nr,
kjer je nb – frekvenca vrtenja za uravnoteženje (mora ustrezati glavnim tehničnim podatkom stojala, n=3000 min-1-1); nr – največja delovna vrtilna frekvenca, min-1.
V praksi pogonske gredi zaradi vrzeli v sklepih in drsnih spojev ni mogoče uravnotežiti pri priporočeni frekvenci vrtenja. V tem primeru se izbere druga frekvenca vrtenja, pri kateri se uravnoteži.
4. Sodobni balansirni stroji za pogonske gredi

Slika 8. Balansirni stroj za pogonske gredi dolžine do 2 metra in teže do 500 kg
Model ima 2 stojali in omogoča uravnoteženje v 2 ravninah korekcije.

Slika 9. Balansirni stroj za pogonske gredi dolžine do 4200 mm in teže do 400 kg
Model ima 4 stojala in omogoča uravnoteženje v 4 ravninah korekcije hkrati.

Slika 10. Horizontalni stroj za uravnoteženje trdih ležajev za dinamično uravnoteženje pogonskih gredi
1 – Balancing item (driveshaft); 2 – Machine base; 3 – Machine supports; 4 – Machine drive; The structural elements of the machine supports are shown in Figure 11.

Slika 11. Podporni elementi stroja za dinamično uravnoteženje pogonskih gredi
1 - Leva nenastavljiva opora; 2 - Vmesna nastavljiva opora (2 kosa); 3 - Desna nenastavljiva fiksna opora; 4 - Ročaj za zaklepanje okvirja opore; 5 - Premična platforma opore; 6 - Matica za navpično nastavitev opore; 7 - Ročaji za zaklepanje navpičnega položaja; 8 - Nosilec za vpenjanje opore; 9 - Premična objemka z vmesnim ležajem; 10 - Ročaj za zaklepanje objemke; 11 - Zaklepanje objemke; 12 - Pogonsko (vodilno) vreteno za namestitev elementa; 13 - Pogonsko vreteno
5. Priprava na uravnoteženje pogonske gredi
V nadaljevanju bomo obravnavali namestitev nosilcev stroja in namestitev izravnalnega elementa (pogonske gredi s štirimi nosilci) na nosilce stroja.

Slika 12. Namestitev prehodnih prirobnic na vretena balansirnega stroja

Slika 13. Namestitev pogonske gredi na nosilce balansirnega stroja

Slika 14. Vodoravna izravnava pogonske gredi na nosilcih balansirnega stroja s pomočjo mehurčkaste ravnilnice

Slika 15. Pritrditev vmesnih podpornikov balansirnega stroja za preprečevanje navpičnega premika pogonske gredi
Ročno zavrtite element za en obrat. Prepričajte se, da se prosto vrti in da se ne zatakne na nosilcih. Po tem je mehanski del stroja nastavljen in namestitev elementa je končana.
6. Postopek uravnoteženja pogonske gredi
Which kit do I need? A two-support machine correcting in two planes (Figure 8) needs the two-channel Balanset-1A. A four-support machine correcting in four planes simultaneously (Figure 9, and the procedure below) needs the four-channel Balanset-4A. The measurement and calculation workflow is identical; only the channel count differs. The procedure below is described for a four-plane setup, while the software screenshots show the same workflow on the two-plane Balanset-1A — on the Balanset-4A the same screens simply add planes 3 and 4.
The process of driveshaft balancing on the balancing machine will be considered using the Balanset-4A measuring system as an example. The Balanset-4A is a portable balancing kit designed for balancing in one, two, three, and four correction planes of rotors, either rotating in their own bearings or mounted on a balancing machine. The device includes up to four vibration sensors, a phase angle sensor, a four-channel measuring unit, and a portable computer.
The entire balancing process, including measurement, processing, and display of information on the magnitude and location of corrective weights, is performed automatically and does not require the user to have additional skills and knowledge beyond the provided instructions. The results of all balancing operations are saved in the Balancing Archive and can be printed as reports if necessary. In addition to balancing, the Balanset-4A can also be used as a regular vibro-tachometer, allowing measurement on four channels of the root mean square (RMS) value of total vibration, RMS of the rotational component of vibration, and control of rotor rotation frequency.
Poleg tega naprava omogoča prikaz grafov časovne funkcije in spektra vibracij glede na hitrost vibracij, kar je lahko koristno pri ocenjevanju tehničnega stanja uravnoteženega stroja.

Figure 16. External View of the Balanset-4A Device for Use as a Measuring and Computing System of the Driveshaft Balancing Machine

Figure 17. Example of Using the Balanset-4A Device as a Measuring and Computing System of the Driveshaft Balancing Machine
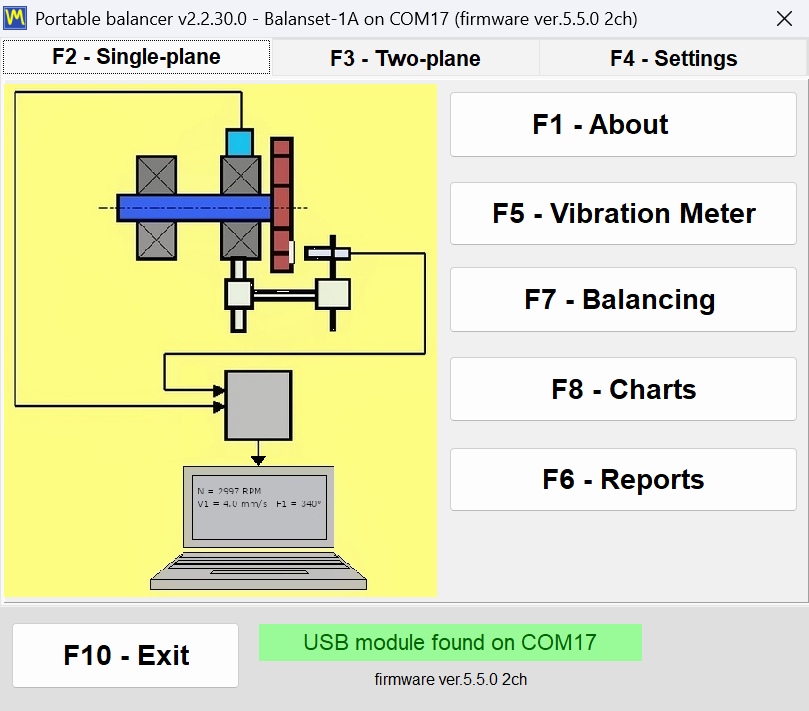
Figure 18. Main window of the Balanset software: F1 - About, F5 - Vibration Meter, F7 - Balancing, F8 - Charts, F6 - Reports
The Balanset-4A device is supplied with vibration sensors. The sensors are accelerometer-based; the software integrates their signal and displays vibration velocity in mm/s RMS.

Figure 19. Installation of Balanset-4A Vibration Sensors on the Supports of the Balancing Machine
The direction of the sensors' sensitivity axis should match the direction of the support's vibration displacement, in this case – horizontal. For additional information on sensor installation, see BALANCING ROTORS IN OPERATING CONDITIONS.
- Senzorje vibracij 1, 2, 3 in 4 namestite na nosilce balansirnega stroja.
- Senzorje vibracij priključite na priključke X1, X2, X3, X4.
- Senzor faznega kota (laserski tahometer) 5 namestite tako, da je nazivna vrzel med radialno (ali končno) površino uravnoteženega rotorja in ohišjem senzorja od 10 do 300 mm.
- Na površino rotorja pritrdite oznako z odsevnim trakom širine vsaj 10-15 mm.
- Senzor faznega kota priključite na priključek X5.
- Merilno enoto priključite na vrata USB računalnika.
- Če uporabljate električno omrežje, računalnik priključite na napajalno enoto.
- Napajalno enoto priključite na omrežje 220 V, 50 Hz.
- Turn on the computer and start the Balanset software.
- Open the balancing workspace with the “F7 - Balancing” button and set the required number of correction planes in the “Plane count” field, so that vibration is measured simultaneously by the vibration sensors connected to the inputs of the measuring unit.
- A mnemonic diagram illustrating the connection of the sensors and the measuring unit appears on the computer display, as shown in Figure 18.
Pred uravnoteženjem je priporočljivo opraviti meritve v načinu vibrometra (gumb F5).
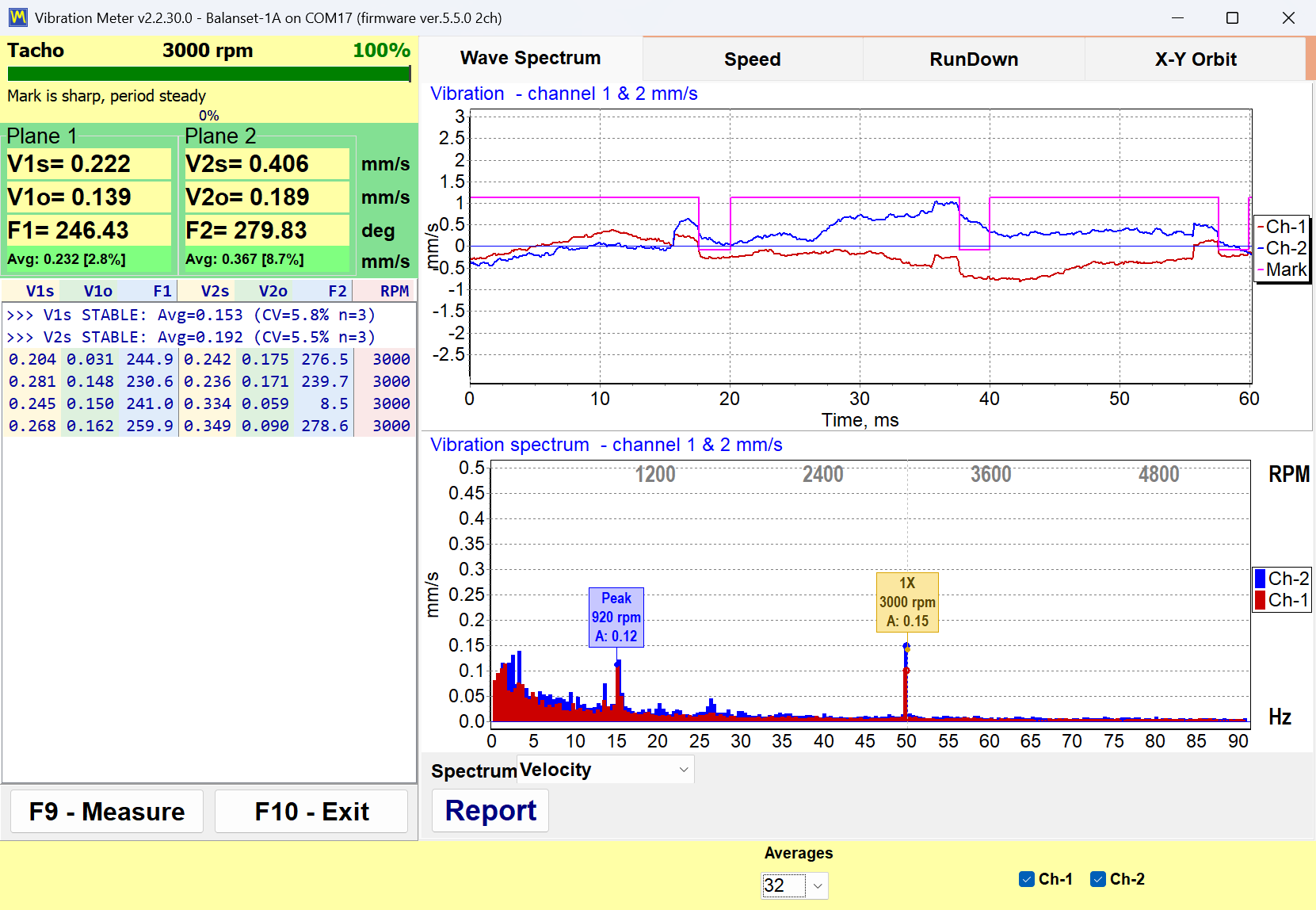
Figure 20. Vibration Meter mode (F5): total vibration V1s, V2s and rotational components V1o, V2o with phases F1, F2, displayed as vibration velocity in mm/s RMS
Če skupna magnituda vibracij V1s (V2s) približno ustreza magnitudi rotacijske komponente V1o (V2o), lahko sklepamo, da glavni prispevek k vibracijam mehanizma izhaja iz neravnovesja rotorja. Če skupna magnituda vibracij V1s (V2s) znatno presega rotacijsko komponento V1o (V2o), je priporočljivo pregledati mehanizem – preveriti stanje ležajev, zagotoviti varno pritrditev na temelj, preveriti, ali se rotor med vrtenjem ne dotika mirujočih delov, in upoštevati vpliv vibracij drugih mehanizmov itd.
Studying the time function graphs and vibration spectra in the charts mode (“F8 - Charts”, the “F5-Spectrum (Hz)” tab) can be useful here.

Slika 21. Časovna funkcija vibracij in spektralni grafikoni
Graf prikazuje, pri katerih frekvencah so ravni vibracij najvišje. Če se te frekvence razlikujejo od vrtilne frekvence rotorja uravnoteženega mehanizma, je treba pred uravnoteženjem prepoznati vire teh vibracijskih komponent in sprejeti ukrepe za njihovo odpravo.
Reading the spectrum of a driveshaft: 1x is unbalance, 2x may be the joint itself. A dominant peak at the rotational frequency (1x) points to unbalance — this is what balancing removes. A dominant peak at twice the rotational frequency (2x), especially together with strong axial vibration, points to the joint angles, worn crosses or splines, or neporavnanost gredi: a universal (cardan) joint working at an angle γ makes the driven yoke lead and lag twice per revolution, so it produces a 2x component even when the shaft is perfectly balanced. Balancing will not remove it — equalise the joint angles (γ1 = γ2) and check the joints first. In the charts mode (“F8 - Charts”) the “F5-Spectrum (Hz)” tab shows the spectrum and the “F3-1x vibration” tab the rotational component; at 3000 min-1 1x = 50 Hz and 2x = 100 Hz.
Pomembno je tudi, da ste pozorni na stabilnost odčitkov v načinu vibrometra - amplituda in faza vibracij se med meritvijo ne smeta spremeniti za več kot 10-15%. V nasprotnem primeru mehanizem morda deluje v bližini resonančnega območja. V tem primeru je treba prilagoditi hitrost rotorja.
When performing four-plane balancing of a new rotor, five calibration runs and at least one trim run (Run T) of the balanced machine are required. Vibration measurement during the first machine run without a trial weight is performed as Run 0 in the balancing workspace. Subsequent runs are performed with a trial weight, sequentially installed on the driveshaft in each correction plane (in the area of each balancing machine support).
Pred vsakim naslednjim zagonom je treba opraviti naslednje korake:
- Ustavite vrtenje rotorja uravnoteženega stroja.
- Odstranite predhodno nameščeno preskusno utež.
- V naslednjo ravnino namestite poskusno utež.
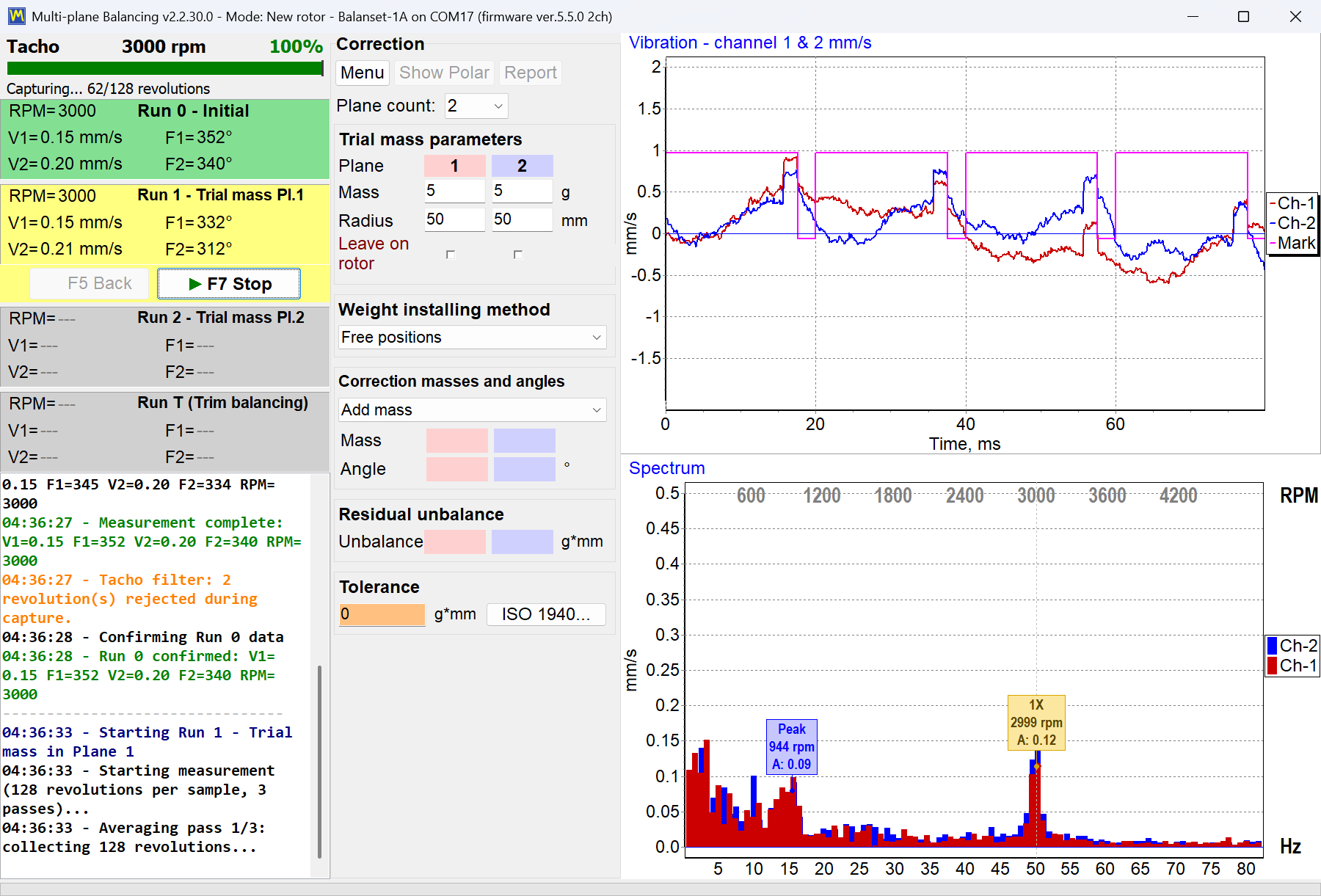
Figure 22. Balancing workspace (“F7 - Balancing”) during a measurement run: Run 0 - Initial, trial-mass runs Run 1 and Run 2, and the trim run Run T
Po zaključku vsake meritve se rezultati vrtilne frekvence rotorja (Nob) in efektivne vrednosti (Vo1, Vo2, Vo3, Vo4) in faze (F1, F2, F3, F4) of the vibration at the rotational frequency of the balanced rotor are saved in the corresponding fields in the program window. After the fifth run (Weight in Plane 4), the balancing results with the polar plot (see Figure 23) appear, displaying the calculated values of the masses (M1, M2, M3, M4) in vgradni koti (f1, f2, f3, f4) korekcijskih uteži, ki jih je treba namestiti na rotor v štirih ravninah, da se izravna njegovo neravnovesje.
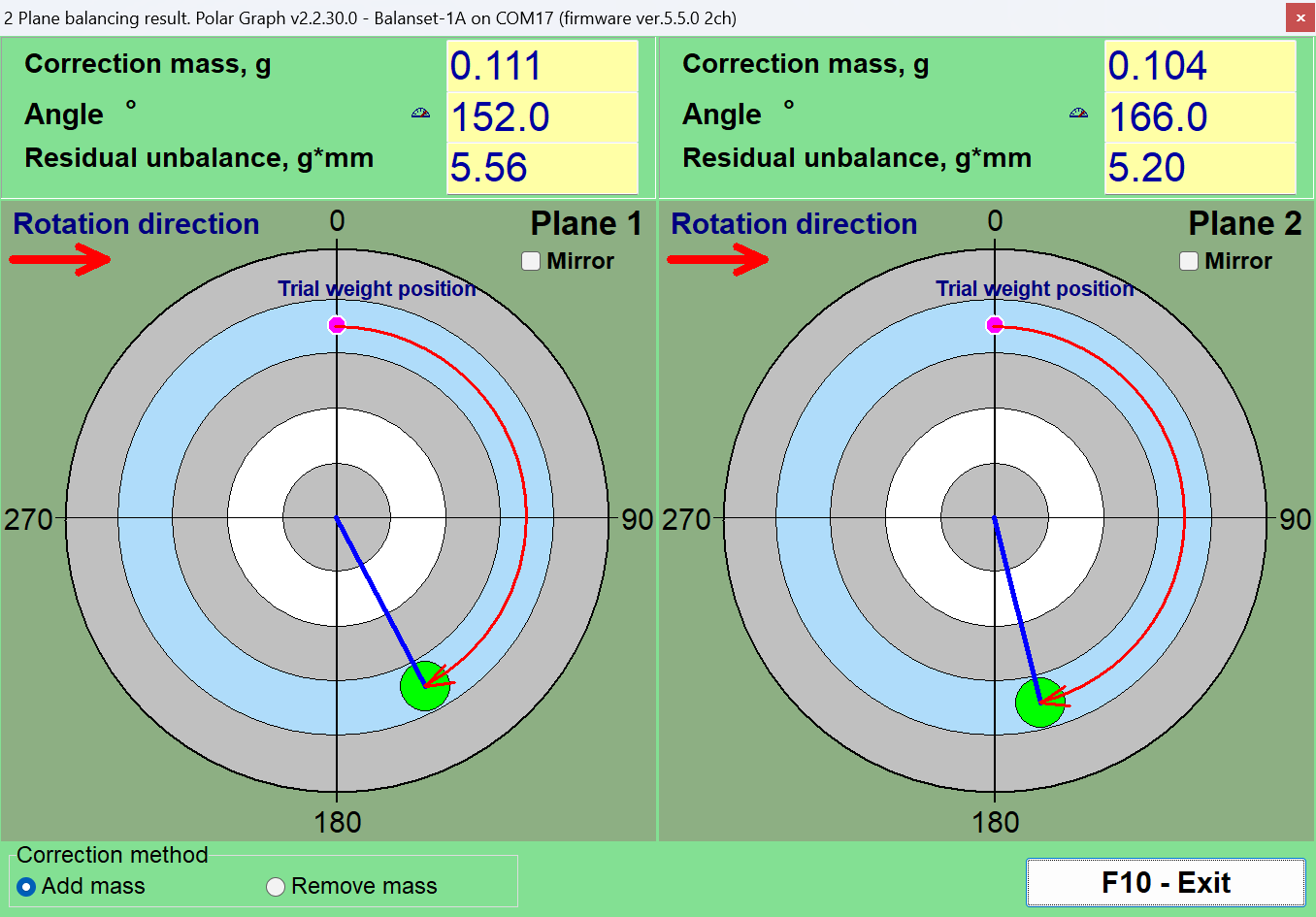
Figure 23. Polar plot of the balancing result: calculated correction masses and angles for each plane, measured from the trial weight position in the direction of rotation
Pozor! Po končanem postopku merjenja med petim zagonom uravnoteženega stroja je potrebno ustaviti vrtenje rotorja in odstraniti predhodno nameščeno poskusno utež. Šele po tem lahko nadaljujete z nameščanjem (ali odstranjevanjem) korektivnih uteži na rotorju.
Kotni položaj za dodajanje (ali odstranjevanje) korektivne uteži na rotorju v polarnem koordinatnem sistemu se meri od mesta namestitve poskusne uteži. Smer merjenja kota sovpada s smerjo vrtenja rotorja. V primeru uravnoteženja z lopaticami se lopatica uravnoteženega rotorja, ki pogojno velja za prvo lopatico, sovpada z mestom namestitve poskusne uteži. Smer oštevilčenja lopatic, prikazana na zaslonu računalnika, sledi smeri vrtenja rotorja.
In this version of the program, it is assumed by default that the corrective weight will be added to the rotor. This is indicated by the mark set in the “Add mass” field. If correcting the imbalance by removing the weight (e.g., by drilling) is necessary, set the mark in the “Remove mass” field using the mouse, after which the angular position of the corrective weight will automatically change by 180 degrees.
After installing the corrective weights on the balanced rotor, carry out the trim run (Run T) to check the effectiveness of the balancing operation. After completing the trim run, the results of the rotor's rotation frequency (Nob) in vrednosti RMS (Vo1, Vo2, Vo3, Vo4) in faze (F1, F2, F3, F4) of the vibration at the rotational frequency of the balanced rotor are saved. Simultaneously, the balancing results (see Figure 23) are updated, displaying the calculated parameters of additional corrective weights that need to be installed (or removed) on the rotor to compensate for its residual imbalance. Additionally, this workspace shows the values of the residual imbalance achieved after balancing. If the values of residual vibration and/or residual imbalance of the balanced rotor meet the tolerance requirements specified in the technical documentation, the balancing process can be completed. Otherwise, the balancing process can be continued. This method allows for correcting possible errors through successive approximations that may occur when installing (removing) the corrective weight on the balanced rotor.
If the balancing process continues, additional corrective weights must be installed (or removed) on the balanced rotor according to the calculated parameters shown in the balancing results.
The rotor balancing coefficients (dynamic influence coefficients) calculated from the results of the five calibration runs are saved in the computer's memory and can be reused with the “Load Coefficients” function when balancing rotors of the same type.
7. Priporočeni razredi točnosti uravnoteženja za toge rotorje
The grades below are the balance quality grades G of ISO 1940-1, superseded without change of values by ISO 21940-11:2016. The grade is defined as G = ena·Ω, where ena is the permissible specific residual unbalance (g·mm/kg = µm) and Ω = 2πn/60 is the service angular velocity (rad/s). The permissible residual unbalance follows as Una = 9549·G·M/n [g·mm], split between the correction planes. See our ISO 1940-1 glossary entry.
The default grade for a road-vehicle driveshaft is G 40; G 16 applies when the drawing or the OEM specification calls for special requirements. Note that residual unbalance and vibration are separate acceptance criteria: the vibration of the assembled machine is assessed to ISO 20816 (formerly ISO 10816) — see our ISO 10816-1 glossary entry.
The G-grade table applies to rigid rotors only — rotors whose service speed stays below roughly 0.5…0.7 of the first bending critical speed. Long driveshafts (2 m and above, and any shaft with an intermediate support) can approach that limit: check the shaft's first critical speed against both the service speed and the balancing speed. If the shaft is flexible at speed, use a modal / multi-speed procedure (ISO 21940-12) — a two-plane rigid-rotor correction will not hold.
Preglednica 2. Priporočeni razredi točnosti uravnoteženja za toge rotorje.

| Vrste strojev (rotorji) | Razred natančnosti uravnoteženja | Balance quality grade G = ena·Ω, mm/s |
|---|---|---|
| Pogonske ročične gredi (strukturno neuravnotežene) za velike nizkohitrostne ladijske dizelske motorje (hitrost bata manj kot 9 m/s) | G 4000 | 4000 |
| Pogonske ročične gredi (strukturno uravnotežene) za velike nizkohitrostne ladijske dizelske motorje (hitrost bata manj kot 9 m/s) | G 1600 | 1600 |
| Pogonske ročične gredi (strukturno neuravnotežene) na izolatorjih vibracij | G 630 | 630 |
| Pogonske ročične gredi (strukturno neuravnotežene) na togih nosilcih | G 250 | 250 |
| Batni motorji, sestavljeni za osebne avtomobile, tovornjake in lokomotive | G 100 | 100 |
| Pogonske ročične gredi (strukturno uravnotežene) na izolatorjih vibracij | G 40 | 40 |
| Car wheels, wheel rims, wheel sets, drive shafts (cardan shafts) | G 40 | 40 |
| Kmetijski stroji | G 16 | 16 |
| Pogonske ročične gredi (uravnotežene) na togih nosilcih | G 16 | 16 |
| Drobilniki | G 16 | 16 |
| Drive shafts (propeller / cardan shafts) with special requirements | G 16 | 16 |
| Plinske turbine za zrakoplove | G 6.3 | 6.3 |
| Centrifuge (separatorji, usedalniki) | G 6.3 | 6.3 |
| Elektromotorji in generatorji (z višino gredi najmanj 80 mm) z največjo nazivno hitrostjo vrtenja do 950 min-1 | G 6.3 | 6.3 |
| Elektromotorji z višino gredi manj kot 80 mm | G 6.3 | 6.3 |
| Ventilatorji | G 6.3 | 6.3 |
| Zobniški pogoni | G 6.3 | 6.3 |
| Stroji za splošne namene | G 6.3 | 6.3 |
| Stroji za rezanje kovin | G 6.3 | 6.3 |
| Stroji za izdelavo papirja | G 6.3 | 6.3 |
| Črpalke | G 6.3 | 6.3 |
| Turbinski polnilniki | G 6.3 | 6.3 |
| Vodne turbine | G 6.3 | 6.3 |
| Kompresorji | G 6.3 | 6.3 |
| Računalniško krmiljeni pogoni | G 2.5 | 2.5 |
| Elektromotorji in generatorji (z višino gredi najmanj 80 mm) z največjo nazivno hitrostjo vrtenja nad 950 min-1 | G 2.5 | 2.5 |
| Plinske in parne turbine | G 2.5 | 2.5 |
| Pogoni strojev za rezanje kovin | G 2.5 | 2.5 |
| Tekstilni stroji | G 2.5 | 2.5 |
| Pogoni za avdio in video opremo | G 1 | 1 |
| Pogoni brusilnih strojev | G 1 | 1 |
| Vretena in pogoni za zelo natančno opremo | G 0.4 | 0.4 |
Pogosto zastavljena vprašanja o uravnoteženju pogonske gredi
Kaj je uravnoteženje pogonske gredi?
Uravnoteženje pogonske gredi je postopek odpravljanja morebitnega neravnovesja mase v pogonski gredi, tako da se ta vrti gladko brez povzročanja vibracij. To vključuje merjenje, kje je gred na eni strani težja, in nato dodajanje ali odstranjevanje majhnih količin teže (na primer z varjenjem uteži za uravnoteženje), da se odpravi to neravnovesje. Uravnotežena pogonska gred deluje enakomerno, kar preprečuje prekomerne vibracije in obrabo komponent vozila.
Zakaj je uravnoteženje pogonske gredi pomembno?
Neuravnotežena pogonska gred lahko povzroči močne vibracije, zlasti pri določenih hitrostih, in lahko povzroči ropotanje med pospeševanjem ali prestavljanjem. Sčasoma lahko te vibracije poškodujejo ležaje, univerzalne zglobe in druge komponente pogonskega sklopa. Uravnoteženje pogonske gredi odpravi te vibracije, kar zagotavlja bolj gladko vožnjo, zmanjšuje obremenitev delov in preprečuje drago škodo ali izpade.
Kateri so pogosti simptomi neuravnotežene pogonske gredi?
Tipični simptomi neuravnotežene ali okvarjene pogonske gredi vključujejo opazne vibracije ali tresenje v tleh vozila ali na sedežu, zlasti ko se hitrost povečuje. Pri prestavljanju prestav ali med pospeševanjem in zaviranjem lahko slišite tudi trkanje ali ropotanje. V nekaterih primerih se lahko kardanski zglob zaradi neuravnoteženosti pregreje. Če opazite te znake, je verjetno, da je treba pogonsko gred uravnotežiti ali popraviti.
Kako uravnotežiti pogonsko gred?
Drive shaft balancing is usually done using a specialized balancing machine. The drive shaft is mounted and spun at high speed while sensors detect any imbalance. A technician then attaches small weights to the drive shaft (or removes material) at specific positions based on the machine's readings. This process is repeated until the drive shaft rotates without significant vibration. Modern systems like the Balanset-4A can guide this process and calculate exactly where and how much weight to add for precise balancing.
Zaključek
Skratka, pravilno uravnoteženje pogonske gredi je bistvenega pomena za varnost, zmogljivost in prihranek stroškov. By detecting and correcting imbalance, you prevent unnecessary wear on parts, avoid damaging breakdowns, and maintain optimal machine performance. Modern balancing systems like our Balanset-1A and Balanset-4A devices make the process efficient, helping even small workshops achieve professional results.
Če se soočate z vztrajnimi vibracijami kardanske gredi ali potrebujete zanesljivo rešitev za uravnoteženje, ne odlašajte in ukrepajte. Uporabite korake, opisane v tem priročniku, ali se za pomoč posvetujte z našimi strokovnjaki. S pravilnim pristopom in opremo lahko zagotovite, da bo vaša kardanska gred delovala nemoteno in zanesljivo še vrsto let. Pišite nam če želite izvedeti več ali raziskati najboljšo opremo za uravnoteženje pogonske gredi za vaše potrebe.







0 Comments