บริการปรับสมดุล › เทอร์บไลน์และเทอร์โบชาร์จเจอร์
ดุลเทอร์บไลน์และเทอร์โบชาร์จเจอร์ — ในตำแหน่ง ด้วยความเร็วในการทำงาน
กังหันไอน้ำ กังหันก๊าซ รันเนอร์น้ำ เพลาหลักกังหันลม และโรเตอร์เทอร์โบชาร์เจอร์อุตสาหกรรมหมุนด้วยความเร็วสูงมากจนแม้ความเยื้องศูนย์ระดับไมโครกรัมก็ทำให้เกิดการสั่นสะเทือนที่ทำลายล้างได้ เราถ่วงสมดุลให้กับอุปกรณ์เหล่านี้ ในตลับลูกปืนของมันเอง ด้วยความเร็วในการทำงาน — ไม่ต้องถอดประกอบ ไม่ต้องส่งไปยังอู่ — และจัดเก็บผลลัพธ์ตามมาตรฐาน ISO 20816 และ ISO 21940-11
สรุป: โรเตอร์กังหันและเทอร์โบชาร์เจอร์อุตสาหกรรมถูกถ่วงสมดุล ในตำแหน่ง ด้วยความเร็วในการทำงานโดยใช้วิธีการสัมประสิทธิ์อิทธิพล เซ็นเซอร์ความสั่นสะเทือนบนตลับลูกปืนและแท็กโคมิเตอร์เลเซอร์วัดแอมพลิจูดและเฟส Balanset-1A คำนวณมวลแก้ไขและมุมที่แน่นอนสำหรับระนาบหนึ่งหรือสอง หลังจากติดตั้งน้ำหนักแล้ว ความสั่นสะเทือนที่เหลือจะได้รับการตรวจสอบเทียบกับขีดจำกัดโซน ISO 20816 สำหรับชั้นเทอร์บไลน์เฉพาะและ ISO 21940-11 G-grade สำหรับโรเตอร์ กระบวนการทั้งหมด — จากการวิ่งครั้งแรกถึงผลลัพธ์ที่จัดเก็บไว้ — โดยทั่วไปใช้เวลาน้อยกว่าหนึ่งกะการทำงานในเว็บไซต์
สัญญาณว่าเทอร์บไลน์หรือเทอร์โบชาร์จเจอร์ของคุณไม่สมดุล
โรเตอร์ของเทอร์บाইนความเร็วสูงขยายผลกระทบของความไม่สมดุลอย่างมากขึ้น สัญญาณเตือนเหล่านี้ไม่ควรมองข้ามไป:
เหตุใดเทอร์บาইนจึงสูญเสียการสมดุล — และมีต้นทุนเท่าใด
โรเตอร์ของเทอร์บาইนทำงานที่ความเร็วซึ่งพฤติกรรมเป็นตัวกลาง ยืดหยุ่นแทนที่จะเป็นมวลที่แข็ง — พวกมันงอเล็กน้อยภายใต้น้ำหนักของตัวเองและภายใต้การโหลดแอโรไดนามิก ดังนั้นศูนย์กลางมวลที่มีประสิทธิผลจึงเปลี่ยนไประหว่างโหมด ความไม่สมดุลสะสมผ่าน การกัดกร่อนของใบพัดและการสะสมของตะกอน ในเทอร์บาইนไอน้ำและแก๊ส ความเสียหายจากปรากฏการณ์โพรงอากาศ ในโรเตอร์ไฮดรอลิก น้ำแข็งเกาะสะสม บนใบพัดเทอร์บาইนลม และ ซีลสึกหรอ ที่เปลี่ยนมวลหมุน ในเทอร์โบชาร์จเจอร์ ตะกอบคาร์บอนและสะเถิ่นบนใบพัดไอเทอร์บีนเป็นสาเหตุหลักและสามารถพัฒนาได้ในเวลาเดินเครื่องหลายพันชั่วโมง
ต้นทุนของการไม่สนใจความไม่สมดุลของไอเทอร์บีนถึงไกลกว่าการเปลี่ยนตลับลูกปืน ความล้าของใบพัดที่เกิดจากการบังคับควบคุมสิ้นสุดการซ่อมแซมที่ขยายออกไป การถูดับตราบของซีลต้องการการกลึงที่มีความแม่นยำ และการหยุดชะงักที่บังคับครั้งเดียวในโรงไฟฟ้าที่มีภาระฐานจะมีต้นทุนเท่ากับหลายเท่าของงบประมาณการบำรุงรักษาประจำปีทั้งหมด การวัดการสั่นสะเทือนบนไซต์ตามตระกูล ISO 20816 ให้ผู้ปฏิบัติการข้อมูลวัตถุประสงค์ที่จำเป็นในการตัดสินใจระหว่างการแทรกแซงทันทีและการดำเนินการที่มีการติดตามต่อเนื่อง — ความแตกต่างระหว่างการแก้ไขที่วางแผนไว้และการหยุดชะงักที่ไม่ได้วางแผน
ทำไมการลดการสั่นสะเทือนลงครึ่งหนึ่งจึงช่วยเพิ่มอายุการใช้งานของตลับลูกปืน
วิธีการปรับสมดุลไอเทอร์บีนหรือเทอร์โบชาร์จเจอร์ — ทีละขั้นตอน
การปรับสมดุลบนไซต์ด้วย Balanset-1A ปฏิบัติตามวิธีค่าสัมประสิทธิ์อิทธิพล — ขั้นตอนเดียวกันที่คุณสามารถดำเนินการได้ด้วยตัวเองโดยใช้อุปกรณ์ ข้อกำหนดความแม่นยำสำหรับไอเทอร์บีนแน่นกว่าและโปรโตคอลความปลอดภัยมีความต้องการมากกว่าโรเตอร์อื่นๆ ส่วนใหญ่
- วัดค่าพื้นฐาน. เซนเซอร์การสั่นสะเทือนติดตั้งบนตัวเรือนตลับลูกปืนหรือตั้งฐาน เครื่องวัดความเร็วโดยเลเซอร์จับมุมเฟสของเพลา การวิ่งที่ความเร็วคงที่บันทึกแอมพลิจูดและเฟสของการสั่นสะเทือนสำหรับแต่ละระนาบการวัดและกำหนดตำแหน่งโซน ISO 20816
- เพิ่มน้ำหนักทดลอง. ตุ้มน้ำหนักทดลองที่กลึงด้วยความแม่นยำติดตั้งที่ตำแหน่งรัศมีที่รู้จักในระนาบการปรับสมดุล — โดยทั่วไปจะเป็นร่องวงกลมเกลียวหรือช่องปลายใบพัด โรเตอร์จะวิ่งอีกครั้งในความเร็วเดียวกันเพื่อให้เครื่องมือจับการตอบสนองของระบบ
- ให้เครื่องคำนวณ. Balanset-1A ใช้เมทริกซ์ค่าสัมประสิทธิ์อิทธิพลเพื่อกำหนดมวลการแก้ไขที่ถูกต้องและตำแหน่งเชิงมุมสำหรับแต่ละระนาบ โดยเป้าหมายคือการให้ได้ระดับ ISO 21940-11 G-grade ที่เข้มงวดที่สุดที่เรขาคณิตของโรเตอร์อนุญาต
- ติดตั้งน้ำหนักแก้ไข. มวลการแก้ไขติดตั้งที่ตำแหน่งที่คำนวณ และตุ้มน้ำหนักทดลองจะถูกเอาออก การเปลี่ยนแปลงมวลสุทธิถูกบันทึกไว้เพื่อการทำเอกสาร OEM และการติดตามรอยมาตรฐาน
- ตรวจสอบให้สอดคล้องกับ ISO 20816. การวิ่งครั้งสุดท้ายที่ความเร็วการทำงานยืนยันว่าแอมพลิจูดซิงโครนัส RMS แบบกว้างและ 1× อยู่ในโซนการยอมรับ ISO 20816 ที่เหมาะสม ผลลัพธ์จะบันทึกไว้ในรายงานงาน
สิ่งที่เราถ่วงสมดุล
- โรเตอร์ไอเทอร์บีนไอน้ำอุตสาหกรรม (ความดันย้อนกลับและควบแน่น)
- ส่วนเทอร์บีนก๊าซและใบพัดคอมเพรสเซอร์
- ランเนอร์ไฟฟ้าพลังน้ำ Francis, Kaplan และ Pelton
- ชุดประกอบเพลาหลักของโรงไฟฟ้าลมสาย
- ล้อกังหันและคอมเพรสเซอร์ของเทอร์โบชาร์เจอร์อุตสาหกรรม (ความเร็วรอบสูงสุดถึง ≈60 000 RPM)
- โรเตอร์ไมโครเทอร์บีนและ ORC expander
- ใบพัดคอมเพรสเซอร์เทอร์โบเบลเวอร์และความเร็วสูง
- โรเตอร์เครื่องทดสอบไอเทอร์บีนแนวแกนและแนวรัศมี
ค่าเผื่อทำให้ชดเชย & มาตรฐาน — กลุ่ม ISO 20816
ISO 20816 เป็นมาตรฐานที่ชัดเจนหลายส่วนสำหรับการประเมินการสั่นสะเทือนเชิงกลของเครื่องจักรโดยการวัดบนส่วนที่ไม่หมุน (ที่อยู่ลูกปืน เสาพื้น) ส่วนแต่ละส่วนครอบคลุมชั้นของเครื่องกังหันโดยเฉพาะและกำหนดโซนความรุนแรงสี่โซน (A–D) สำหรับความเร็ว RMS หรือการกระจัดแบนด์วิดท์กว้าง:
- ISO 20816-2 — เครื่องกังหันไอน้ำบนบกและเครื่องกำเนิดไฟฟ้าที่มีกำลังเกิน 50 MW ค่าเกณฑ์ โซน A/B มักเป็น 2.3 และ 4.5 มม./วินาที RMS; โซน D (ปิด) โดยทั่วไปคือ 7.1 มม./วินาที
- ISO 20816-4 — เครื่องกังหันแก๊สที่มีผลลัพธ์กำลังเกิน 3 MW รวมถึงหน่วยอนุพันธ์อุตสาหกรรม กำหนดข้อ จำกัด แยกต่างหากสำหรับการสั่นสะเทือนที่อยู่ลูกปืนและการกระจัดสัมพัทธ์ของเพลา
- ISO 20816-5 — เครื่องจักรไฮดรอลิก (ปั๊มและเครื่องกังหัน) ในโรงไฟฟ้า รวมถึงตัวทำงาน Francis Kaplan และ Pelton โซนการสั่นสะเทือนคำนึงถึงการกระตุ้นไฮดรอลิกตลอดจนความไม่สมดุลเชิงกล
- ISO 20816-21 — เครื่องกังหันลมบนบกและนอกชายฝั่ง ครอบคลุมการสั่นสะเทือนของลูกปืนหลัก กระปุกเกียร์ และเครื่องกำเนิดไฟฟ้า ที่ประเมินในระหว่างการทำงานปกติ
ค่าเผื่อความสมดุลของโรเตอร์สำหรับเครื่องกังหันทั้งหมดควบคุมโดย ISO 21940-11 เกรด G เครื่องกังหันความเร็วสูงมักต้องการ G 1.0 หรือ G 2.5. ISO 21940-11 ระบุเทอร์โบชาร์เจอร์ไว้ที่ G 6.3 ในตัวอย่างโรเตอร์ทั่วไป และให้กรอบการคำนวณ G-grade ไว้ ส่วนค่าคลาดเคลื่อนเฉพาะของเทอร์โบชาร์เจอร์มักกำหนดโดย OEM และอาจเข้มงวดกว่าตัวอย่าง ISO ทั่วไป การวัดด้วย Balanset-1A ของเราจะให้ข้อมูลที่คุณใช้แสดงความสอดคล้องได้ทั้งกับขีดจำกัดการยอมรับการสั่นสะเทือนของ ISO 20816 และขีดจำกัดความไม่สมดุลคงเหลือของ ISO 21940-11 ในการทำงานหน้างานครั้งเดียว
เพื่อความปลอดภัยการสั่นพ้องของใบพัด การข้ามความเร็ววิกฤติจะถูกแมปโดยใช้วิธีการแผนภาพ Campbell ของเรา เครื่องคิดเลขความถี่ใบพัดเครื่องกังหัน ให้คุณตรวจสอบว่าความถี่ธรรมชาติของใบพัดใด ๆ อยู่ในช่วงความเร็วในการทำงานหรือไม่ก่อนการใช้งานหรือหลังจากการติดตั้งใบพัดใหม่
Balanset-1A — ชุดการปรับสมดุลออนไซต์ที่สมบูรณ์ของคุณสำหรับเครื่องกังหัน
ทุกอย่างในหน้านี้ทำได้ด้วยเครื่องมือแบบพกพาเพียงเครื่องเดียว: Balanset-1A. เป็นเครื่องปรับสมดุลแบบไดนามิกสองช่องและเครื่องวิเคราะห์การสั่นสะเทือนที่ปรับสมดุลของโรเตอร์เครื่องกังหันและเทอร์โบชาร์จเจอร์ ในตำแหน่งของตนเอง ขณะทำงานด้วยความเร็วที่กำหนด, โดยใช้วิธีค่าสัมประสิทธิ์อิทธิพลแบบ 3 รัน — ซอฟต์แวร์จะคำนวณมวลและมุมแก้ไขที่แน่นอนพร้อมบันทึกรายงาน ช่องการสั่นสะเทือนครอบคลุม 5–1000 Hz ซึ่งสอดคล้องกับความเร็วรอบ 1× ประมาณ 300–60 000 RPM (ความแม่นยำดีที่สุดถึง ≈33 000 RPM / 550 Hz) ส่วนล้อเทอร์โบชาร์เจอร์แบบยานยนต์ที่หมุนที่ 100 000–300 000 RPM อยู่นอกช่วงนี้และต้องใช้อุปกรณ์ถ่วงสมดุลความเร็วสูงเฉพาะทาง

ชุดอุปกรณ์ครบชุดประกอบด้วยอะไรบ้าง
€1,975 · ชุดครบชุด, มีสินค้าในสต็อก, ใบกำกับภาษี
- หน่วยวัดอินเตอร์เฟซ (USB, 2 ช่อง)
- เครื่องวัดความเร่งการสั่นสะเทือนสองตัว (สายเคเบิล 4 เมตร, 10 เมตรเป็นตัวเลือก)
- เครื่องวัดความเร็วเลเซอร์ / เซนเซอร์เฟสแสง (50–500 mm)
- ขาตั้งแม่เหล็กสำหรับเซ็นเซอร์
- เครื่องชั่งดิจิทัลสำหรับน้ำหนักทดลอง & น้ำหนักแก้ไข
- ซอฟต์แวร์วิเคราะห์และปรับสมดุลระบบ Windows
- กล่องขนส่งพลาสติก
ชุดอุปกรณ์ครบชุด
ชุดอุปกรณ์ · เซ็นเซอร์ 2 ตัว · เลเซอร์ทาโคมิเตอร์ · ขาตั้งแม่เหล็ก · เครื่องชั่งดิจิทัล · ซอฟต์แวร์ · กระเป๋าขนส่ง ครบครันทุกสิ่งที่จำเป็นสำหรับเริ่มต้นบาลานซ์กังหันได้ทันที
ชุด OEM
ยูนิต · เซนเซอร์ 2 ตัว · ทาโคมิเตอร์เลเซอร์ · ซอฟต์แวร์ สำหรับผู้ผลิตระบบที่มีขาตั้ง เครื่องชั่ง และกระเป๋าอยู่แล้ว หรือต้องการฝังยูนิตเข้ากับเครื่องบาลานซ์
| พารามิเตอร์ | ค่า |
|---|---|
| ช่องทางการวัด | 2 (การถ่วงสมดุลแบบระนาบเดียว & สองระนาบ) |
| ช่วงความเร็วการสั่นสะเทือน | 0.2–80 mm/s RMS |
| ช่วงความถี่ | 5–1000 Hz (≤10% amplitude error above 550 Hz) |
| ความถูกต้องของการวัด | ±5% ของสเกลเต็ม |
| วิธี | สัมประสิทธิ์อิทธิพลแบบ 3-run (1 หรือ 2 ระนาบ) |
| การวิเคราะห์ | แอมพลิจูด & เฟสที่ 1×, สเปกตรัม FFT & รูปคลื่น, รายงานที่บันทึก |
| แล็ปท็อป | ไม่รวม (คอมพิวเตอร์ Windows, สามารถขอได้) |
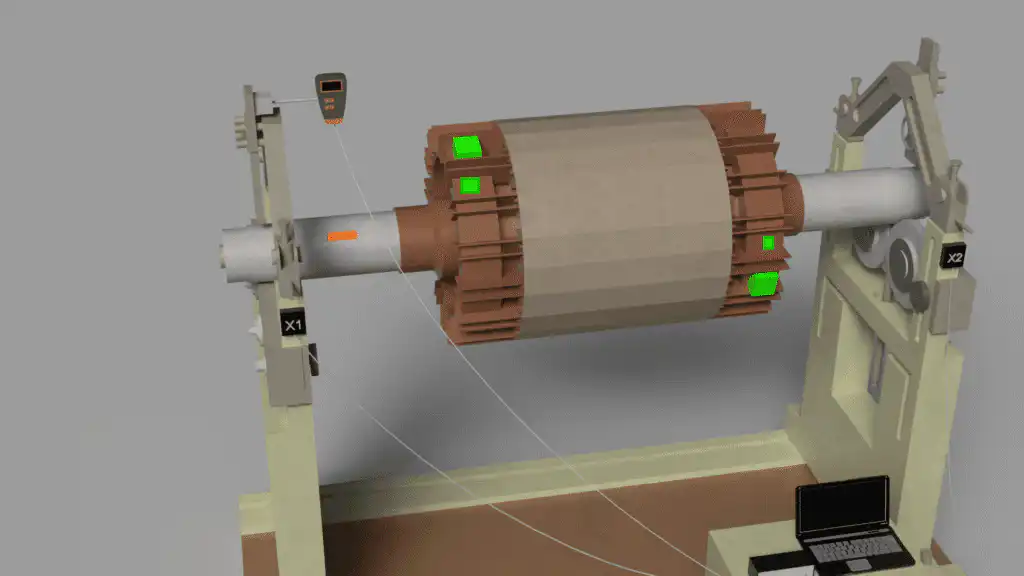
การปรับสมดุลเครื่องกังหัน & เทอร์โบชาร์จเจอร์ในสนาม

โรเตอร์บนการตั้งค่าการปรับสมดุล
โรเตอร์เทอร์โบความเร็วสูงที่มีเครื่องมือสำหรับการปรับสมดุลออนไซต์สองระนาบด้วย Balanset-1A

การวัดการสั่นสะเทือนที่ลูกปืน
เซ็นเซอร์และเลเซอร์แทโครที่ลูกปืนจับภาพ 1×แอมพลิจูดและเฟสที่ความเร็วในการทำงาน
การสมดุลสนามกับเครื่องสมดุล — อันไหนเหมาะสม?
| เกณฑ์ | การปรับสมดุลภาคสนาม (Balanset-1A) | เครื่องสมดุลโรเตอร์ในอู่ซ่อม |
|---|---|---|
| ต้องถอดโรเตอร์ออก | ไม่ — สมดุลในตำแหน่งการทำงาน | ใช่ — ถอดประกอบเต็มรูปแบบ |
| สภาวะการทำงานจริง | ใช่ — ความเร็วจริง เบียร์สนับสนุนจริง | ไม่ — ความเร็วต่ำ การสนับสนุนแตกต่างกัน |
| เวลาหยุดทำงาน | ชั่วโมงถึงหนึ่งกะ | หลายวันถึงหลายสัปดาห์ |
| ผลกระทบของโรเตอร์ยืดหยุ่นถูกจับภาพ | ใช่ — การดัดตัวที่ความเร็วรวมอยู่ | ไม่ — ไม่มีในการทำงานอู่ซ่อมที่ความเร็วต่ำ |
| การตรวจสอบความสั่นสะเทือน ISO 20816 | รวมในขั้นตอนการทำงาน | ขั้นตอนแยกต่างหากหลังการประกอบใหม่ |
| การแก้ไขสองระนาบ | ใช่ (ระนาบทั้งสองพร้อมกัน) | ใช่ |
| พกพาได้ — ที่ใดที่หนึ่ง | ใช่ — พอดีในกระเป๋าถือพกพา | อู่ซ่อมแบบอยู่กับที่เท่านั้น |
| ค่าใช้จ่ายต่องานโดยทั่วไป | ต่ำ (ไม่มีการขนส่ง ไม่มีเครนทั้ง) | สูง (โลจิสติกส์ + เวลาอู่ซ่อม) |
เครื่องคิดเลขฟรีสำหรับโรเตอร์เทอร์บาइน
คำถามที่พบบ่อยเกี่ยวกับการสมดุลเทอร์บาइน
สามารถสมดุลโรเตอร์เทอร์บาइนในสถานที่ได้หรือต้องใช้เครื่องสมดุลหรือไม่
ส่วนใดของ ISO 20816 ที่ใช้กับเทอร์บาइนของฉัน
ชาร์จเจอร์แรงดันควรต้องการระดับการสมดุลใด
เทอร์บาइนของฉันหยุดการทำงานเนื่องจากความสั่นสะเทือนเกินพิกัดหลังจากการซ่อมแซมครั้งใหญ่ทุกครั้ง—เหตุใด
สามารถ Balanset-1A วัดความสั่นสะเทือนของฮাวซิ่งจุดรองรับตาม ISO 20816 ได้หรือไม่
ฉันจะทราบได้อย่างไรว่าจะสมดุลในระนาบเดียวหรือสองระนาบ
เรียนรู้ทฤษฎี
ประเมินและสมดุลของคุณ—ตามมาตรฐาน ISO
Balanset-1A วัดการสั่นสะเทือนที่ตัวเรือนแบริ่งตามมาตรฐาน ISO 20816 และทำการสมดุลระนาบสองระนาบในสนามตามมาตรฐาน ISO 21940-11 — ให้คุณทั้งการวินิจฉัยและการแก้ไขในเครื่องมือแบบพกพาเพียงชิ้นเดียว พร้อมผลลัพธ์ที่จัดทำเป็นเอกสารสำหรับทุกงาน