
پن کا توازن
(ISO 31350-2007 وائبریشن سے استعمال شدہ معلومات۔ صنعتی پرستار۔ تیار کردہ کمپن اور توازن کے معیار کے لیے تقاضے)
کمپن پنکھے کی طرف سے پیدا ہونے والی کمپن اس کی سب سے اہم تکنیکی خصوصیات میں سے ایک ہے۔ یہ مصنوعات کے ڈیزائن اور تیاری کے معیار کی نشاندہی کرتا ہے۔ بڑھی ہوئی وائبریشن پنکھے کی غلط تنصیب، اس کی تکنیکی حالت کے خراب ہونے وغیرہ کی نشاندہی کر سکتی ہے۔ اس وجہ سے، پنکھے کی وائبریشن کو عام طور پر قبولیت کے ٹیسٹ کے دوران، شروع کرنے سے پہلے انسٹالیشن کے دوران، نیز مشین کی حالت کی نگرانی کے پروگرام کو انجام دینے کے دوران ماپا جاتا ہے۔ پنکھے کے وائبریشن ڈیٹا کو اس کے سپورٹ اور منسلک سسٹمز (ڈکٹ) کے ڈیزائن میں بھی استعمال کیا جاتا ہے۔ وائبریشن کی پیمائش عام طور پر کھلی سکشن اور ڈسچارج پورٹس کے ساتھ کی جاتی ہے، لیکن یہ یاد رکھنا چاہیے کہ پنکھے کی کمپن ایئر فلو ایروڈینامکس، گردشی رفتار اور دیگر خصوصیات میں تبدیلیوں کے ساتھ نمایاں طور پر مختلف ہو سکتی ہے۔
ISO 10816-1-97، ISO 10816-3-2002، اور ISO 31351-2007 پیمائش کے طریقے قائم کرتے ہیں اور وائبریشن سینسر کے مقامات کی وضاحت کرتے ہیں۔ اگر ڈکٹ یا پنکھے کی بنیاد پر ان کے اثرات کا اندازہ لگانے کے لیے کمپن کی پیمائش کی جاتی ہے، تو پیمائش کے پوائنٹس کا انتخاب اسی کے مطابق کیا جاتا ہے۔
پنکھے کی کمپن کی پیمائش مہنگی ہو سکتی ہے، اور بعض اوقات ان کی لاگت خود پروڈکٹ کی تیاری کی لاگت سے نمایاں طور پر بڑھ جاتی ہے۔ لہذا، فریکوئنسی بینڈز میں انفرادی مجرد کمپن اجزاء یا وائبریشن پیرامیٹرز کی قدروں پر کوئی پابندی صرف اس وقت لگائی جانی چاہیے جب ان قدروں سے تجاوز پنکھے کی خرابی کی نشاندہی کرے۔ پیمائش کے نتائج کے مطلوبہ استعمال کی بنیاد پر کمپن پیمائش پوائنٹس کی تعداد بھی محدود ہونی چاہیے۔ عام طور پر، پنکھے کی کمپن کی حالت کا اندازہ لگانے کے لیے پنکھے کے سپورٹ پر کمپن کی پیمائش کرنا کافی ہوتا ہے۔
بنیاد وہ ہے جس پر پنکھا لگایا گیا ہے اور کیا پنکھے کو ضروری مدد فراہم کرتا ہے۔ بیس کے بڑے پیمانے پر اور سختی کا انتخاب اس کے ذریعے پھیلنے والی کمپن کی افزائش کو روکنے کے لیے کیا جاتا ہے۔
سپورٹ دو قسم کے ہوتے ہیں:
- کمپلینٹ سپورٹ: ایک فین سپورٹ سسٹم ڈیزائن کیا گیا ہے تاکہ سپورٹ کی پہلی قدرتی فریکوئنسی پنکھے کی آپریٹنگ گردشی فریکوئنسی سے نمایاں طور پر کم ہو۔ سپورٹ کی تعمیل کی ڈگری کا تعین کرتے وقت، پنکھے اور سپورٹ ڈھانچے کے درمیان لچکدار داخلوں پر غور کیا جانا چاہیے۔ اسپرنگس پر پنکھے کو معطل کرکے یا لچکدار عناصر (اسپرنگس، ربڑ کے الگ تھلگ، وغیرہ) پر سپورٹ رکھ کر سپورٹ کی تعمیل کو یقینی بنایا جاتا ہے۔ سسپنشن سسٹم کی قدرتی فریکوئنسی - پنکھا عام طور پر 25% فریکوئنسی سے کم ہوتا ہے جو ٹیسٹ شدہ پنکھے کی کم از کم گردشی رفتار کے مطابق ہوتا ہے۔
- سخت سپورٹ: ایک فین سپورٹ سسٹم ڈیزائن کیا گیا ہے تاکہ سپورٹ کی پہلی قدرتی فریکوئنسی آپریٹنگ گردشی فریکوئنسی سے نمایاں طور پر زیادہ ہو۔ پرستار کی بنیاد کی سختی نسبتا ہے. یہ مشین بیرنگ کی سختی کے مقابلے میں غور کیا جانا چاہئے. بیئرنگ ہاؤسنگ وائبریشن کا بیس وائبریشن کا تناسب بیس کی تعمیل کے اثر کو نمایاں کرتا ہے۔ بیس کو سخت اور کافی بڑا سمجھا جا سکتا ہے اگر مشین کے پاؤں یا سپورٹ فریم کے قریب بیس وائبریشن کا طول و عرض (کسی بھی سمت میں) قریب ترین بیئرنگ سپورٹ (کسی بھی سمت) پر حاصل ہونے والے زیادہ سے زیادہ کمپن پیمائش کے نتیجے کے 25% سے کم ہو۔
چونکہ فیکٹری ٹیسٹنگ کے دوران پنکھے کو نصب کرنے والے عارضی بنیاد کا بڑے پیمانے پر اور سختی آپریٹنگ سائٹ پر تنصیب کے حالات سے نمایاں طور پر مختلف ہو سکتی ہے، اس لیے فیکٹری کے حالات کی حد کی قدریں گردشی فریکوئنسی رینج میں تنگ بینڈ وائبریشن پر لاگو ہوتی ہیں، اور آن سائٹ فین ٹیسٹنگ - براڈ بینڈ وائبریشن تک، مشین کی مجموعی کمپن حالت کا تعین کرنا۔ آپریٹنگ سائٹ پنکھے کی آخری تنصیب کا مقام ہے، جس کے لیے آپریٹنگ شرائط کی وضاحت کی گئی ہے۔
پرستار کے زمرے (BV زمرہ جات)
مداحوں کو ان کے متوقع استعمال کی خصوصیات کی بنیاد پر درجہ بندی کیا جاتا ہے،, درستگی کی کلاسوں کا توازن, اور تجویز کردہ کمپن پیرامیٹر کی حد کی قدریں۔ پنکھے کا ڈیزائن اور مقصد وہ معیار ہیں جو قابل قبول کے مطابق پنکھوں کی مختلف اقسام کو درجہ بندی کرنے کی اجازت دیتے ہیں۔ عدم توازن قدرتی اور ارتعاش کی سطحیں (BV-زمرے).
جدول 1 وہ زمرہ جات پیش کرتا ہے جن سے مداحوں کو ان کی درخواست کی شرائط کی بنیاد پر منسوب کیا جا سکتا ہے، جائز عدم توازن کی قدروں اور کمپن کی سطحوں کو مدنظر رکھتے ہوئے۔ پرستار کے زمرے کا تعین کارخانہ دار کے ذریعہ کیا جاتا ہے۔
جدول 1 - پرستار کے زمرے
| درخواست کی شرائط | مثالیں | بجلی کی کھپت، کلو واٹ | BV زمرہ |
| رہائشی اور دفتری جگہیں۔ | چھت اور اٹاری پنکھے، ونڈو ایئر کنڈیشنر | 0.15 یا اس سے کم | بی وی-1 |
| > 0.15 | بی وی-2 | ||
| عمارتیں اور زرعی احاطے۔ | وینٹیلیشن اور ایئر کنڈیشننگ سسٹم کے لیے پنکھے؛ سیریز کے آلات میں پرستار | برابر یا کم از کم 3.7 | بی وی-2 |
| تین نقطہ سات | بی وی-۳ | ||
| صنعتی عمل اور پاور جنریشن | بند جگہوں، بارودی سرنگوں، کنویئرز، بوائلرز، ونڈ ٹنلز، گیس کی صفائی کے نظام میں پنکھے | تین سو یا اس سے کم | بی وی-۳ |
| تین سو | آئی ایس او 10816-3 دیکھیں | ||
| نقل و حمل، بشمول سمندری جہاز | انجنوں، ٹرکوں اور کاروں کے پرستار | پندرہ یا اس سے کم | بی وی-۳ |
| پندرہ | بی وی-4 | ||
| سرنگیں۔ | وینٹیلیٹنگ سب ویز، ٹنل، گیراج کے پرستار | ساتاہتر یا اس سے کم | بی وی-۳ |
| پچھتر | بی وی-4 | ||
| کوئی بھی | بی وی-4 | ||
| پیٹرو کیمیکل پیداوار | خطرناک گیسوں کو ہٹانے کے لیے پنکھے، اور دیگر تکنیکی عمل میں استعمال ہوتے ہیں۔ | برابر یا کم از کم 37 | بی وی-۳ |
| > 37 | بی وی-4 | ||
| کمپیوٹر چپ کی پیداوار | صاف ستھرے کمرے بنانے کے لیے پرستار | کوئی بھی | بی وی-5 |
| نوٹس
1 یہ معیار صرف 300 کلوواٹ سے کم طاقت والے پنکھوں پر لاگو ہوتا ہے۔ زیادہ طاقت والے پنکھوں کے ارتعاش کا جائزہ ISO 10816-3 کے مطابق لیا جاتا ہے۔ تاہم، معیاری سیریز کے برقی موٹروں کی نامی طاقت 355 کلوواٹ تک ہو سکتی ہے۔ ایسے برقی موٹر والے پنکھوں کو اس معیار کے مطابق قبول کیا جانا چاہیے۔
2 جدول 1 بڑے قطر (عموماً 2800 سے 12500 ملی میٹر تک) کم رفتار ہلکے محوری پنکھوں پر لاگو نہیں ہوتی جو ہیٹ ایکسچینجرز، کولنگ ٹاورز وغیرہ میں استعمال ہوتے ہیں۔ ایسے پنکھوں کے لیے توازن کی درستگی کا درجہ G16 ہونا چاہیے اور پنکھے کی زمرہ BV-3 ہے۔
|
|||
جب پنکھے پر بعد میں نصب کرنے کے لیے انفرادی روٹر عناصر (چکیاں یا امپیلرز) خریدے جائیں تو ان عناصر کی توازن کی درستگی کی کلاس (جدول 2 ملاحظہ کریں) پر عمل کرنا چاہیے، اور جب پنکھے کو پوری طرح خریدا جائے تو فیکٹری کمپن کے ٹیسٹ کے نتائج (جدول 4) اور مقام پر کمپن کے نتائج (جدول 5) کو بھی مدنظر رکھنا چاہیے۔ عموماً ان خصوصیات پر پہلے ہی اتفاق ہو چکا ہوتا ہے، لہٰذا پنکھے کے انتخاب کو اس کی BV-کیٹیگری کی بنیاد پر کیا جا سکتا ہے۔
جدول 1 میں قائم کردہ زمرہ پنکھوں کے معمول کے استعمال کے لیے مخصوص ہے، لیکن جائز صورتوں میں صارف مختلف BV-زمرے کا پنکھہ طلب کر سکتا ہے۔ مشورہ دیا جاتا ہے کہ سازوسامان کی فراہمی کے معاہدے میں پنکھے کا BV-زمرہ، درستگی کا درجہ اور قابل قبول ارتعاش کی سطحیں واضح کی جائیں۔
گاہک اور تیار کنندہ کے درمیان پنکھے کی تنصیب کی شرائط کے بارے میں ایک الگ معاہدہ کیا جا سکتا ہے، تاکہ اسمبل شدہ پنکھے کی فیکٹری جانچ میں آپریٹنگ سائٹ پر منصوبہ بند تنصیب کی شرائط کو مدنظر رکھا جائے۔ اگر ایسا معاہدہ موجود نہ ہو تو فیکٹری ٹیسٹ کے لیے بنیاد کی قسم (مضبوط یا لچکدار) پر کوئی پابندی نہیں ہوگی۔
پن کا توازن

عمومی احکامات
پنکھے کے تیار کنندہ ذمہ دار ہیں توازن متعلقہ ضابطہ جاتی دستاویز کے مطابق پرستار۔ یہ معیار کی ضروریات کی بنیاد پر ہے۔ آئی ایس او 1940-1. توازن عموماً انتہائی حساس، خصوصی طور پر ڈیزائن کیے گئے توازن مشینیں, ، جس سے ایک درست جائزہ ممکن ہوتا ہے باقی ماندہ عدم توازن.
پن کی توازن کی درستگی کی کلاسیں
پن ویلز کے لیے بیلنسنگ کی درستگی کی کلاسز جدول 2 کے مطابق لاگو کی جاتی ہیں۔ پن بنانے والا اسمبلی میں متعدد اجزاء کی بیلنسنگ کر سکتا ہے، جن میں پہیے کے علاوہ شافٹ، کپلنگ، پُلی وغیرہ شامل ہو سکتے ہیں۔ اس کے علاوہ، انفرادی اسمبلی اجزاء کو بھی بیلنسنگ کی ضرورت پڑ سکتی ہے۔
جدول 2 – توازن کی درستگی کی کلاسز
|
مداحوں کی زمرہ
|
روٹر ( پہیے ) بیلنسنگ کی درستگی کا درجہ
|
|
بی وی-1
|
G16
|
|
بی وی-2
|
G16
|
|
بی وی-۳
|
جی6.3
|
|
بی وی-4
|
جی ٹو ڈاٹ فائیو
|
|
بی وی-5
|
جی ایک نقطہ صفر
|
|
نوٹ: زمرہ BV-1 کے پرستاروں میں وہ چھوٹے سائز کے پرستار بھی شامل ہو سکتے ہیں جن کا وزن 224 گرام سے کم ہو، جن کے لیے متعین کردہ توازن کی درستگی کو برقرار رکھنا مشکل ہوتا ہے۔ اس صورت میں، پرستار کے گھومنے کے محور کے حوالے سے مادّے کی تقسیم کی یکسانیت کو تیاری کی ٹیکنالوجی کے ذریعے یقینی بنایا جانا چاہیے۔
|
|
پنکھے کی کمپن کی پیمائش
ماپنے کی ضروریات
عمومی احکامات
شکل 1 تا 4 میں ہر پنکھے کے بیرنگ پر کچھ ممکنہ پیمائش کے نکات اور سمتوں کو دکھایا گیا ہے۔ جدول 4 میں دی گئی قدریں گردش کے محور کے عمود پر ہونے والی پیمائشوں سے متعلق ہیں۔ کارخانے میں کی جانے والی ٹیسٹوں اور مقام پر کی جانے والی پیمائشوں دونوں کے لیے پیمائش کے نکات کی تعداد اور مقام بنانے والے کی صوابدید یا گاہک کے ساتھ معاہدے کے مطابق طے کیے جاتے ہیں۔ یہ سفارش کی جاتی ہے کہ پیمائش فین وہیل شافٹ (امپیلر) کے بیرنگز پر کی جائے۔ اگر یہ ممکن نہ ہو تو سینسر کو ایسی جگہ نصب کرنا چاہیے جہاں اس اور بیرنگ کے درمیان سب سے کم میکانیکي رابطہ یقینی ہو۔ سینسر کو غیر سپورٹ شدہ پینلز، پنکھے کے ہاؤسنگ، انکلوژر کے عناصر، یا بیئرنگ سے براہ راست منسلک نہ ہونے والی دیگر جگہوں پر نصب نہیں کرنا چاہیے (ایسے پیمائش کے نتائج استعمال کیے جا سکتے ہیں، لیکن پنکھے کی ارتعاشی حالت کا اندازہ لگانے کے لیے نہیں، بلکہ ڈکٹ یا بیس تک منتقل ہونے والی ارتعاش کے بارے میں معلومات حاصل کرنے کے لیے – دیکھیں ISO 31351 اور ISO 5348)۔
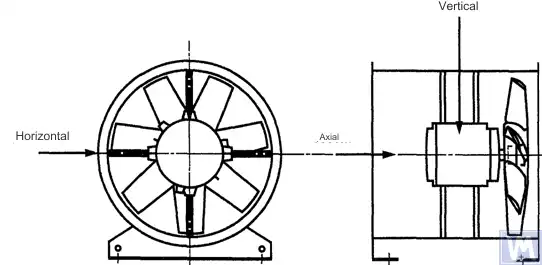
شکل 1۔ افقی طور پر نصب شدہ ایکسیل فین کے لیے تین کوآرڈینیٹ سینسر کی جگہ
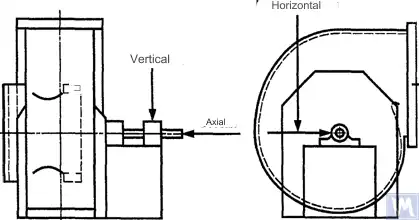
شکل 2۔ سنگل سکشن ریڈیئل فین کے لیے تین کوآرڈینیٹ سینسر کی جگہ
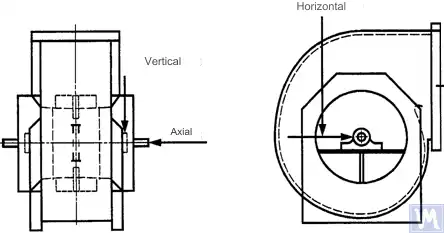
شکل 3۔ ڈبل سکشن ریڈیئل فین کے لیے تین کوآرڈینیٹ سینسر کی جگہ
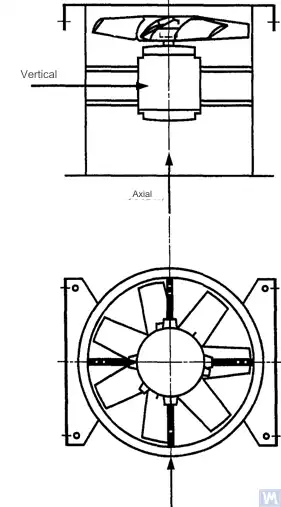
شکل 4۔ عمودی طور پر نصب شدہ ایکسیل فین کے لیے تین-متنسب سینسر کی جگہ
افقی سمت میں پیمائشیں شافٹ کے محور کے عمود پر کی جانی چاہئیں۔عمودی سمت میں پیمائشیں افقی سمتِ پیمائش کے عمود پر اور پنکھے کے شافٹ کے عمود پر کی جانی چاہئیں۔طولی سمت میں پیمائشیں شافٹ کے محور کے متوازی کی جانی چاہئیں۔
جڑت نوعیت کے سینسرز کے استعمال سے پیمائشیں
اس معیار میں دیے گئے تمام ارتعاش کے اقدار انرشیہ قسم کے سینسرز کے ذریعے کیے گئے پیمائشوں سے متعلق ہیں، جن کا سگنل بیرنگ ہاؤسنگ کی حرکت کی نقل کرتا ہے۔
استعمال کیے جانے والے سینسر یا تو ایکسلرومیٹرز ہوں گے یا رفتار سینسر۔ سینسرز کی درست تنصیب پر خاص توجہ دی جانی چاہیے: معاون سطح پر کوئی خلا نہ ہو، جھول یا گونج نہ ہو۔ ماپے گئے ارتعاش میں نمایاں تبدیلیوں سے بچنے کے لیے سینسرز اور ان کے ماؤنٹنگ سسٹم کا سائز اور وزن حد سے زیادہ بڑا نہیں ہونا چاہیے۔ سینسر کی تنصیب کے طریقہ کار اور پیمائش کے نظام کی کیلیبریشن کی وجہ سے مجموعی غلطی ماپے گئے قدر کے +/- 10% سے زیادہ نہیں ہونی چاہیے۔
غیر رابطہ سینسرز کے استعمال سے پیمائشیں
صارف اور تیار کنندہ کے درمیان معاہدے کے تحت، سلائیڈنگ بیئرنگز میں زیادہ سے زیادہ قابلِ قبول شافٹ انحراف (دیکھیں ISO 7919-1) کے تقاضے مقرر کیے جا سکتے ہیں۔ متعلقہ پیمائشیں بغیر رابطے کے سینسرز استعمال کرکے کی جا سکتی ہیں۔
اس صورت میں، پیمائش کا نظام شافٹ کی سطح کو بیئرنگ ہاؤسنگ کے حوالے سے منتقلی کا تعین کرتا ہے۔ یہ واضح ہے کہ منتقلیوں کی اجازت شدہ ایمپلی ٹیوڈ بیئرنگ کلیئرنس کی قدر سے زیادہ نہیں ہونی چاہیے۔ کلیئرنس کی قدر بیئرنگ کے سائز اور قسم، بوجھ (ریڈیئل یا ایکسیل)، اور پیمائش کی سمت پر منحصر ہوتی ہے (کچھ بیئرنگ ڈیزائنز میں بیضوی سوراخ ہوتا ہے، جس کی وجہ سے افقی سمت میں کلیئرنس عمودی سمت کے مقابلے میں زیادہ ہوتی ہے)۔ جن عوامل پر غور کرنا ضروری ہے، ان کی گوناگونی شافٹ کی منتقلی کی یکساں حدود مقرر کرنے کی اجازت نہیں دیتی، تاہم کچھ سفارشات جدول 3 میں پیش کی گئی ہیں۔ اس جدول میں دی گئی اقدار ہر سمت میں بیئرنگ کی کل ریڈیئل کلیئرنس کے فیصد کی نمائندگی کرتی ہیں۔
جدول 3 – بیرنگ کے اندر زیادہ سے زیادہ نسبتی شافٹ انحراف
| پنکھے کی ارتعاشاتی حالت | زیادہ سے زیادہ تجویز کردہ منتقلی، کلیئرنس ویلیو کا فیصد (کسی بھی محور کے ساتھ) |
| کمیشنگ/مطمئن کن حالت | 25 فیصد سے کم |
| انتباہ | +50% |
| بندش | +70% |
| 1) کسی مخصوص بیئرنگ کے ریڈیئل اور ایکسیل کلیئرنس کی قدریں اس کے سپلائر سے حاصل کی جانی چاہئیں۔ | |
دیے گئے اقدار شافٹ کی سطح پر 'غلط' انحرافات کو بھی مدنظر رکھتی ہیں۔ یہ 'غلط' انحرافات پیمائش کے نتائج میں اس لیے ظاہر ہوتے ہیں کہ شافٹ کی کمپن کے علاوہ، اگر شافٹ مڑا ہوا ہو یا اس کی شکل گول نہ ہو تو میکانی رن آؤٹس بھی ان نتائج کو متاثر کرتے ہیں۔ جب غیر رابطہ سینسر استعمال کیا جائے تو پیمائش کے نتائج میں برقی رن آؤٹس بھی شامل ہوں گے جو پیمائش کے مقام پر شافٹ کے مادے کی مقناطیسی اور برقی خصوصیات کے باعث طے پاتے ہیں۔ خیال کیا جاتا ہے کہ پنکھے کی کمیشننگ اور بعد ازاں معمول کے آپریشن کے دوران، پیمائش کے مقام پر میکانی اور برقی رن آؤٹس کے مجموعے کی حد دو اقدار میں سے زیادہ سے زیادہ سے تجاوز نہیں کرنی چاہیے: 0.0125 ملی میٹر یا پیمائش شدہ منتقلی کی قدر کا 25 فیصد۔ رن آؤٹس کو شافٹ کو آہستہ آہستہ گھما کر (25 سے 400 آر پی ایم کی رفتار سے) طے کیا جاتا ہے، جب روٹر پر عدم توازن کی وجہ سے پیدا ہونے والی قوتوں کا اثر معمولی ہوتا ہے۔ مقررہ رن آؤٹ ٹالرنس کو پورا کرنے کے لیے، شافٹ کی اضافی مشینی کاری کی ضرورت پڑ سکتی ہے۔ اگر ممکن ہو تو غیر رابطہ سینسرز کو براہ راست بیرنگ ہاؤسنگ پر نصب کرنا چاہیے۔
دیے گئے حد کے اقدار صرف اس پنکھے پر لاگو ہوتے ہیں جو اپنی نامی حالت میں کام کر رہا ہو۔ اگر پنکھے کے ڈیزائن میں متغیر گردش رفتار کے ساتھ کام کرنے کی اجازت ہو تو ارتعاش کی بلند سطحیں دیگر رفتاروں پر بھی ممکن ہیں کیونکہ ارتعاشات کا ناگزیر اثر ہوتا ہے۔
اگر پنکھے کے ڈیزائن میں انٹیک پورٹ پر ہوا کے بہاؤ کے حوالے سے بلیڈز کی پوزیشن تبدیل کرنے کی اجازت ہو تو دیے گئے اعداد و شمار بلیڈز مکمل طور پر کھلے ہونے کی صورت میں لاگو کیے جائیں۔ یہ بات قابلِ ذکر ہے کہ ہوا کے بہاؤ کا رک جانا، خاص طور پر جب بلیڈز کا زاویہ انٹیک ہوا کے بہاؤ کے مقابلے میں بڑا ہو، کمپن کی سطح میں اضافے کا باعث بن سکتا ہے۔
مداحوں کی حمایت کا نظام
انسٹالیشن کے بعد پنکھوں کی ارتعاشی حالت سپورٹ کی سختی کو مدنظر رکھتے ہوئے طے کی جاتی ہے۔ ایک سپورٹ کو سخت تصور کیا جاتا ہے اگر پنکھے–سپورٹ نظام کی پہلی قدرتی تعدد گردش کی رفتار سے زیادہ ہو۔ عام طور پر جب بڑے کنکریٹ کے بنیادوں پر نصب کیا جائے تو سپورٹ کو سخت تصور کیا جاتا ہے، اور جب ارتعاشی آئسولیٹرز پر نصب کیا جائے تو لچکدار۔ ایک اسٹیل فریم، جو اکثر پنکھے نصب کرنے کے لیے استعمال ہوتا ہے، دونوں قسم کی سپورٹ میں شمار ہو سکتا ہے۔ پنکھے کی سپورٹ کی قسم کے بارے میں شک کی صورت میں، سسٹم کی پہلی قدرتی تعدد معلوم کرنے کے لیے حساب کتاب یا تجربات کیے جا سکتے ہیں۔ بعض صورتوں میں پنکھے کی سپورٹ کو ایک سمت میں سخت اور دوسری سمت میں لچکدار سمجھا جانا چاہیے۔
فیکٹری ٹیسٹ کے دوران قابلِ اجازت پنکھے کی کمپن کی حدیں
جدول 4 میں دی گئی حدِ ارتعاش کی سطحیں اسمبل شدہ پنکھوں پر لاگو ہوتی ہیں۔ یہ فیکٹری ٹیسٹ کے دوران استعمال ہونے والی گھومنے والی تعدد کے لیے بیرنگ سپورٹس پر تنگ بینڈ ارتعاش کی رفتار کی پیمائشوں سے متعلق ہیں۔
جدول 4 – فیکٹری ٹیسٹ کے دوران کمپن کی حد کی قدریں
| مداحوں کی زمرہ | آر ایم ایس کمپن کی رفتار کی حد، ملی میٹر فی سیکنڈ | |
| مضبوط حمایت | کمپلینٹ سپورٹ | |
| بی وی-1 | 9.0 | 11.2 |
| بی وی-2 | 3.5 | 5.6 |
| بی وی-۳ | 2.8 | 3.5 |
| بی وی-4 | 1.8 | 2.8 |
| بی وی-5 | 1.4 | 1.8 |
| نوٹس
1 وائبریشن ویلوسٹی یونٹس کو نقل مکانی یا تنگ بینڈ وائبریشن کے لیے ایکسلریشن یونٹس میں تبدیل کرنے کے اصول ضمیمہ A میں بیان کیے گئے ہیں۔
2 اس جدول میں موجود اقدار کھلے انلیٹ گائیڈ وینز کے ساتھ موڈ میں چلنے والے پنکھے کے برائے نام بوجھ اور برائے نام گردشی تعدد پر لاگو ہوتی ہیں۔ لوڈنگ کی دیگر شرائط کے لیے حد کی قدروں پر مینوفیکچرر اور گاہک کے درمیان اتفاق ہونا چاہیے، لیکن یہ تجویز کیا جاتا ہے کہ وہ ٹیبلر اقدار سے 1.6 گنا سے زیادہ نہ بڑھیں۔
|
||
آن سائٹ ٹیسٹنگ کے دوران قابل اجازت پنکھے کے کمپن کی حدود
آپریٹنگ سائٹ پر کسی بھی پنکھے کی وائبریشن کا انحصار نہ صرف اس کے توازن کے معیار پر ہوتا ہے۔ تنصیب سے متعلق عوامل، جیسے کہ سپورٹ سسٹم کی ماس اور سختی، کا بھی اثر ہوگا۔ لہذا، پنکھا بنانے والا اپنی آپریٹنگ سائٹ پر پنکھے کی کمپن لیول کے لیے ذمہ دار نہیں ہے جب تک کہ اس کی وضاحت معاہدے میں نہ ہو۔
جدول 5 مختلف زمروں میں پرستاروں کے نارمل آپریشن کے لیے تجویز کردہ حد اقدار (بیرنگ ہاؤسنگز پر براڈ بینڈ وائبریشن کے لیے وائبریشن ویلوسٹی یونٹس میں) فراہم کرتا ہے۔
جدول 5 - آپریٹنگ سائٹ پر کمپن کی قدروں کو محدود کریں۔
| پنکھے کی ارتعاشاتی حالت | مداحوں کی زمرہ | آر ایم ایس کمپن کی رفتار کی حد، ملی میٹر فی سیکنڈ | |
| مضبوط حمایت | کمپلینٹ سپورٹ | ||
| کمیشننگ | بی وی-1 | 10 | 11.2 |
| بی وی-2 | 5.6 | 9.0 | |
| بی وی-۳ | 4.5 | 6.3 | |
| بی وی-4 | 2.8 | 4.5 | |
| بی وی-5 | 1.8 | 2.8 | |
| انتباہ | بی وی-1 | 10.6 | 14.0 |
| بی وی-2 | 9.0 | 14.0 | |
| بی وی-۳ | 7.1 | 11.8 | |
| بی وی-4 | 4.5 | 7.1 | |
| بی وی-5 | 4.0 | 5.6 | |
| بندش | بی وی-1 | __1) | __1) |
| بی وی-2 | __1) | __1) | |
| بی وی-۳ | 9.0 | 12.5 | |
| بی وی-4 | 7.1 | 11.2 | |
| بی وی-5 | 5.6 | 7.1 | |
| 1) زمرہ جات BV-1 اور BV-2 کے پرستاروں کے لیے شٹ ڈاؤن کی سطح کمپن پیمائش کے نتائج کے طویل مدتی تجزیہ کی بنیاد پر قائم کی گئی ہے۔ | |||
کمیشن کیے جانے والے نئے پنکھوں کی وائبریشن "کمیشننگ" کی سطح سے زیادہ نہیں ہونی چاہیے۔ جیسے جیسے پنکھا چلتا ہے، اس کی کمپن کی سطح پہننے کے عمل اور اثر انداز ہونے والے عوامل کے مجموعی اثر کی وجہ سے بڑھنے کی امید ہے۔ کمپن میں اس طرح کا اضافہ عام طور پر فطری ہے اور اس وقت تک تشویش کا باعث نہیں ہونا چاہیے جب تک کہ یہ "انتباہی" کی سطح تک نہ پہنچ جائے۔
"انتباہی" کمپن کی سطح تک پہنچنے پر، بڑھتے ہوئے کمپن کی وجوہات کی چھان بین اور اسے کم کرنے کے اقدامات کا تعین کرنا ضروری ہے۔ اس حالت میں پنکھے کا آپریشن مسلسل نگرانی کے تحت ہونا چاہئے اور اس وقت تک محدود ہونا چاہئے جس کی وجہ سے کمپن بڑھنے کی وجوہات کو ختم کرنے کے اقدامات کی نشاندہی کی جائے۔
اگر وائبریشن لیول "شٹ ڈاؤن" کی سطح تک پہنچ جائے تو، بڑھتے ہوئے کمپن کی وجوہات کو ختم کرنے کے لیے فوری طور پر اقدامات کیے جائیں، بصورت دیگر، پنکھے کو بند کر دینا چاہیے۔ وائبریشن لیول کو قابل قبول سطح پر لانے میں تاخیر بیئرنگ کو پہنچنے والے نقصان، روٹر میں دراڑیں اور پنکھے کی رہائش کے ویلڈنگ پوائنٹس پر، بالآخر پنکھے کی تباہی کا باعث بن سکتی ہے۔
پنکھے کی کمپن کی حالت کا اندازہ لگاتے وقت، وقت کے ساتھ کمپن کی سطح میں ہونے والی تبدیلیوں کی نگرانی کرنا ضروری ہے۔ کمپن کی سطح میں اچانک تبدیلی پنکھے کے فوری معائنہ اور دیکھ بھال کے اقدامات کی ضرورت کی نشاندہی کرتی ہے۔ کمپن کی تبدیلیوں کی نگرانی کرتے وقت، اس کی وجہ سے ہونے والے عبوری عمل، مثال کے طور پر، چکنا کرنے والے کی تبدیلی یا دیکھ بھال کے طریقہ کار پر غور نہیں کیا جانا چاہیے۔
اسمبلی کے طریقہ کار کا اثر
پہیوں کے علاوہ، پنکھے میں دوسرے گھومنے والے عناصر شامل ہوتے ہیں جو پنکھے کی کمپن کی سطح کو متاثر کر سکتے ہیں: ڈرائیو پلیاں، بیلٹ، کپلنگ، موٹر روٹرز، یا دیگر ڈرائیو ڈیوائسز۔ اگر آرڈر کے حالات میں ڈرائیو ڈیوائس کے بغیر پنکھے کی فراہمی کی ضرورت ہوتی ہے، تو کارخانہ دار کے لیے کمپن کی سطح کا تعین کرنے کے لیے اسمبلی ٹیسٹ کروانا غیر عملی ہو سکتا ہے۔ ایسی صورت میں، اگر مینوفیکچرر نے پنکھے کے پہیے کو متوازن کر دیا ہے، تب بھی اس بات کا کوئی یقین نہیں ہے کہ پنکھا اس وقت تک آسانی سے چلے گا جب تک کہ پنکھے کی شافٹ ڈرائیو سے منسلک نہ ہو جائے اور کمیشننگ کے دوران پوری مشین کو وائبریشن کے لیے ٹیسٹ نہ کر لیا جائے۔
عام طور پر، اسمبلی کے بعد، کمپن کی سطح کو قابل قبول سطح تک کم کرنے کے لیے اضافی توازن کی ضرورت ہوتی ہے۔ زمرہ جات BV-3، BV-4، اور BV-5 کے تمام نئے پرستاروں کے لیے، یہ تجویز کیا جاتا ہے کہ کمیشن کرنے سے پہلے اسمبل شدہ مشین کے لیے وائبریشن کی پیمائش کریں۔ یہ ایک بنیادی لائن قائم کرے گا اور مزید دیکھ بھال کے اقدامات کا خاکہ بنائے گا۔
فین مینوفیکچررز فیکٹری ٹیسٹنگ کے بعد نصب شدہ ڈرائیو پرزوں کی کمپن پر اثرات کے ذمہ دار نہیں ہیں۔
کمپن پیمائش کے اوزار اور انشانکن
پیمائش کے اوزار
پیمائش کے ٹولز اور بیلنسنگ مشینوں کی تصدیق ہونی چاہیے اور کام کی ضروریات کو پورا کرنا چاہیے۔ تصدیق کے درمیان وقفہ کا تعین پیمائش (ٹیسٹ) ٹولز کے لیے مینوفیکچرر کی سفارشات سے ہوتا ہے۔ پیمائش کے آلات کی حالت کو جانچ کی پوری مدت میں ان کے معمول کے کام کو یقینی بنانا چاہیے۔
پیمائش کے آلات کے ساتھ کام کرنے والے عملے کے پاس پیمائش کے آلات کے معیار میں ممکنہ خرابیوں اور خرابی کا پتہ لگانے کے لیے کافی مہارت اور تجربہ ہونا چاہیے۔
انشانکن
پیمائش کے تمام آلات کو معیار کے مطابق کیلیبریٹ کیا جانا چاہیے۔ انشانکن کے طریقہ کار کی پیچیدگی ایک سادہ جسمانی معائنہ سے لے کر پورے نظام کے انشانکن تک مختلف ہو سکتی ہے۔ آئی ایس او 1940-1 کے مطابق بقایا عدم توازن کا تعین کرنے کے لیے استعمال ہونے والی اصلاحی عوام کو پیمائش کے ٹولز کیلیبریٹنگ کے لیے بھی استعمال کیا جا سکتا ہے۔
دستاویزی
توازن
درخواست پر، اگر معاہدہ کی شرائط کے مطابق فراہم کی جاتی ہے، تو صارف کو فین بیلنسنگ ٹیسٹ رپورٹ فراہم کی جا سکتی ہے، جس میں درج ذیل معلومات شامل کرنے کی سفارش کی جاتی ہے:
- بیلنسنگ مشین بنانے والے کا نام، ماڈل نمبر؛
- روٹر کی تنصیب کی قسم: سپورٹ یا کینٹیلیورڈ کے درمیان؛
- توازن کا طریقہ: جامد یا متحرک؛
- روٹر اسمبلی کے گھومنے والے حصوں کا ماس؛
– ہر ایک میں باقیات کا عدم توازن اصلاح طیارہ (ہمارا استعمال کریں باقی بے توازن کیلکولیٹر (آئی ایس او 21940-11) قابلِ قبول اقدار کا تعین کرنے کے لیے;
- ہر اصلاحی جہاز میں قابل اجازت بقایا عدم توازن؛
- توازن کی درستگی کی کلاس؛
- قبولیت کا معیار: قبول / مسترد؛
- توازن کا سرٹیفکیٹ (اگر ضروری ہو)۔
- بیلنسنگ مشین بنانے والے کا نام، ماڈل نمبر؛
- روٹر کی تنصیب کی قسم: سپورٹ یا کینٹیلیورڈ کے درمیان؛
- توازن کا طریقہ: جامد یا متحرک؛
- روٹر اسمبلی کے گھومنے والے حصوں کا ماس؛
– ہر ایک میں باقیات کا عدم توازن اصلاح طیارہ (ہمارا استعمال کریں باقی بے توازن کیلکولیٹر (آئی ایس او 21940-11) قابلِ قبول اقدار کا تعین کرنے کے لیے;
- ہر اصلاحی جہاز میں قابل اجازت بقایا عدم توازن؛
- توازن کی درستگی کی کلاس؛
- قبولیت کا معیار: قبول / مسترد؛
- توازن کا سرٹیفکیٹ (اگر ضروری ہو)۔
کمپن
درخواست پر، اگر معاہدہ کی شرائط کے مطابق فراہم کی جاتی ہے، تو گاہک کو فین وائبریشن ٹیسٹ رپورٹ فراہم کی جا سکتی ہے، جس میں درج ذیل معلومات شامل کرنے کی سفارش کی جاتی ہے:
- پیمائش کے اوزار استعمال کیے جاتے ہیں؛
- کمپن سینسر منسلک کرنے کا طریقہ؛
- پنکھے کے آپریٹنگ پیرامیٹرز (ہوا کا بہاؤ، دباؤ، طاقت)؛
- پنکھے کی گردش کی فریکوئنسی؛
- سپورٹ کی قسم: سخت یا موافق؛
- ماپا کمپن:
1) وائبریشن سینسر کی پوزیشنیں اور پیمائش کے محور،
2) پیمائش کی اکائیاں اور وائبریشن ریفرنس لیول،
3) پیمائش کی فریکوئنسی رینج (تنگ یا وسیع فریکوئنسی بینڈ)؛
- قابل اجازت کمپن کی سطح
- کمپن کی سطح کی پیمائش
- قبولیت کا معیار: قبول / مسترد؛
- وائبریشن لیول سرٹیفکیٹ (اگر ضروری ہو)۔
- پیمائش کے اوزار استعمال کیے جاتے ہیں؛
- کمپن سینسر منسلک کرنے کا طریقہ؛
- پنکھے کے آپریٹنگ پیرامیٹرز (ہوا کا بہاؤ، دباؤ، طاقت)؛
- پنکھے کی گردش کی فریکوئنسی؛
- سپورٹ کی قسم: سخت یا موافق؛
- ماپا کمپن:
1) وائبریشن سینسر کی پوزیشنیں اور پیمائش کے محور،
2) پیمائش کی اکائیاں اور وائبریشن ریفرنس لیول،
3) پیمائش کی فریکوئنسی رینج (تنگ یا وسیع فریکوئنسی بینڈ)؛
- قابل اجازت کمپن کی سطح
- کمپن کی سطح کی پیمائش
- قبولیت کا معیار: قبول / مسترد؛
- وائبریشن لیول سرٹیفکیٹ (اگر ضروری ہو)۔
بیلنسنگ مشین پر مداحوں کو بیلنس کرنے کے طریقے
B.1. ڈائریکٹ ڈرائیو فین
B.1.1. عمومی دفعات
فین وہیل، جو اسمبلی کے دوران براہِ راست موٹر شافٹ پر نصب کی جاتی ہے، کو موٹر شافٹ کی طرح کی وے کے اثر کو مدِ نظر رکھتے ہوئے اسی اصول کے مطابق متوازن کیا جانا چاہیے۔
پچھلے سالوں میں تیار کردہ موٹرز کو مکمل کی وے استعمال کرکے متوازن کیا جا سکتا تھا۔ فی الحال موٹر شافٹوں کو ISO 31322 کے مطابق نصف کی وے استعمال کرکے متوازن کیا جاتا ہے اور اسے حرف H سے نشان زد کیا جاتا ہے (دیکھیں ISO 31322)۔
B.1.2. مکمل کی وے کے ساتھ متوازن موٹرز
پنکھے کا پہیہ، جو موٹر کے شافٹ پر مکمل کی وے کے ساتھ نصب ہے، ٹیپرڈ آربر پر بغیر کی کے متوازن کیا جانا چاہیے۔
B.1.3. آدھی کی وے کے ساتھ متوازن موٹرز
موتور کے شافٹ پر نصب پنکھے کے پہیے کو آدھے کی وے کے ساتھ متوازن کرنے کے لیے درج ذیل اختیارات ممکن ہیں:
الف) اگر پہیے کا ہب اسٹیل کا ہو تو بیلنس کرنے کے بعد اس میں کی وے کاٹیں۔
ب) آدھی چابی کو کی وے میں داخل کرکے ایک مخروطی شافٹ پر توازن برقرار رکھنا؛
ج) ایک آربر پر ایک یا زیادہ کی وےز (دیکھیں B.3) کے ساتھ مکمل چابیاں استعمال کرتے ہوئے توازن۔
الف) اگر پہیے کا ہب اسٹیل کا ہو تو بیلنس کرنے کے بعد اس میں کی وے کاٹیں۔
ب) آدھی چابی کو کی وے میں داخل کرکے ایک مخروطی شافٹ پر توازن برقرار رکھنا؛
ج) ایک آربر پر ایک یا زیادہ کی وےز (دیکھیں B.3) کے ساتھ مکمل چابیاں استعمال کرتے ہوئے توازن۔
B.2. دوسرے شافٹ سے چلنے والے پنکھے
جہاں ممکن ہو، تمام گھومتے ہوئے اجزاء بشمول پنکھے کے شافٹ اور پولی کو ایک واحد یونٹ کے طور پر متوازن کیا جانا چاہیے۔ اگر یہ غیر عملی ہو تو شافٹ کے لیے استعمال ہونے والے اسی کی وے کے حساب کے قاعدے کے مطابق آربر (دیکھیں B.3) پر متوازن کیا جانا چاہیے۔
بی۔۳۔ آربر
وہ شافٹ جس پر بیلنسنگ کے دوران پنکھے کا پہیہ نصب کیا جاتا ہے، درج ذیل شرائط کو پورا کرنا چاہیے:
الف) جتنا ممکن ہو ہلکا ہو؛
ب) مناسب دیکھ بھال اور باقاعدہ معائنوں کے ذریعے ایک متوازن حالت میں ہونا؛
c) ترجیحاً ایسا ہونا چاہیے کہ اسے ٹیپر کیا گیا ہو تاکہ ہب ہول اور آربر کے ابعاد میں برداشت کی حدوں کے باعث پیدا ہونے والی مرکزیت کی کمی کی غلطیاں کم ہو جائیں۔ اگر آربر کو ٹیپر کیا گیا ہو تو عدم توازن کی حسابات میں اصلاحی سطحوں کی بیرنگز کے حوالے سے حقیقی پوزیشن کو مدنظر رکھا جانا چاہیے۔
الف) جتنا ممکن ہو ہلکا ہو؛
ب) مناسب دیکھ بھال اور باقاعدہ معائنوں کے ذریعے ایک متوازن حالت میں ہونا؛
c) ترجیحاً ایسا ہونا چاہیے کہ اسے ٹیپر کیا گیا ہو تاکہ ہب ہول اور آربر کے ابعاد میں برداشت کی حدوں کے باعث پیدا ہونے والی مرکزیت کی کمی کی غلطیاں کم ہو جائیں۔ اگر آربر کو ٹیپر کیا گیا ہو تو عدم توازن کی حسابات میں اصلاحی سطحوں کی بیرنگز کے حوالے سے حقیقی پوزیشن کو مدنظر رکھا جانا چاہیے۔
اگر سلنڈر نما آربر استعمال کرنا ضروری ہو تو اس میں کی وے کاٹا جانا چاہیے، جس میں مکمل چابی ڈالی جاتی ہے تاکہ آربر سے پنکھے کے پہیے تک ٹارک منتقل کیا جا سکے۔
ایک اور آپشن یہ ہے کہ شافٹ کے قطر کے مخالف سروں پر دو کی وے کاٹے جائیں، تاکہ الٹے بیلنسنگ طریقے کا استعمال ممکن ہو سکے۔ اس طریقہ کار میں درج ذیل مراحل شامل ہیں۔ سب سے پہلے، پہیے کا عدم توازن ناپنے کے لیے ایک کی وے میں پوری چابی اور دوسری میں آدھی چابی داخل کریں۔ پھر پہیے کو آربر کے حوالے سے 180° گھما کر دوبارہ اس کا عدم توازن ناپیں۔ دونوں عدم توازن کی قدروں کے درمیان فرق آربر اور یونیورسل ڈرائیو جوائنٹ کے باقی ماندہ عدم توازن کی وجہ سے ہوتا ہے۔ حقیقی روٹر عدم توازن کی قدر حاصل کرنے کے لیے، ان دونوں پیمائشوں کے فرق کا نصف لیں۔
پنکھے کی کمپن کے ذرائع
پنکھے کے اندر کمپن کے بہت سے ذرائع ہوتے ہیں، اور مخصوص تعدد پر کمپن براہِ راست مشین کی مخصوص ڈیزائن خصوصیات سے منسلک ہو سکتی ہے۔ یہ ضمیمہ صرف زیادہ تر پنکھوں میں مشاہدہ کیے جانے والے سب سے عام کمپن کے ذرائع کا احاطہ کرتا ہے۔ عمومی اصول یہ ہے کہ سپورٹ سسٹم میں کسی بھی قسم کی ڈھیلا پن پنکھے کی کمپن کی حالت میں خرابی کا باعث بنتی ہے۔
پنکھے کا عدم توازن
یہ پنکھے کی کمپن کا بنیادی ذریعہ ہے؛ اس کی خصوصیت گردش کی تعدد پر کمپن کے جزو کی موجودگی ہے (پہلا ہارمونکعدم توازن کی وجہ یہ ہے کہ گھومنے والی ماس کا محور گردش کے محور سے غیر مرکزی یا جھکا ہوا ہوتا ہے۔ یہ غیر مساوی ماس کی تقسیم، ہب ہول اور شافٹ کے ابعاد میں برداشت کی مجموعی مقدار، شافٹ کے مڑنے، یا ان عوامل کے امتزاج کی وجہ سے ہو سکتا ہے۔ عدم توازن سے پیدا ہونے والی کمپن بنیادی طور پر شعاعی سمت میں عمل کرتی ہے۔.
عارضی شافٹ مڑ جانے کا سبب غیر یکساں میکانی حرارتی پیداوار ہو سکتا ہے – گھومتے اور ساکن اجزاء کے درمیان رگڑ کی وجہ سے – یا برقی نوعیت کا۔ مستقل مڑ جانے کا سبب مواد کی خصوصیات میں تبدیلیاں یا جب پنکھے اور موٹر کو الگ الگ نصب کیا جائے تو شافٹ اور پنکھے کے پہیے کی غیر ہم محوری ہو سکتی ہے۔
آپریشن کے دوران، ہوا سے ذرات کے جمع ہونے کی وجہ سے پنکھے کے پہیے میں عدم توازن بڑھ سکتا ہے۔ جارحانہ ماحول میں کام کرنے پر، پہیے کے غیر یکساں گھساؤ یا زنگ لگنے کی وجہ سے عدم توازن پیدا ہو سکتا ہے۔
عدم توازن کو مناسب سطحوں میں اضافی توازن کے ذریعے درست کیا جا سکتا ہے، لیکن توازن کے عمل سے پہلے عدم توازن کے اسباب کی نشاندہی کر کے انہیں دور کرنا چاہیے اور مشین کی ارتعاشی استحکام کی جانچ کرنی چاہیے۔
پنکھے اور موٹر کا غیر ہم محوری
یہ نقص اس وقت پیدا ہو سکتا ہے جب موٹر اور پنکھے کے شافٹ بیلٹ ڈرائیو یا لچکدار جوڑ کے ذریعے منسلک ہوں۔ غیر ہمراہی کو بعض اوقات مخصوص کمپن کی تعدد کے اجزاء سے پہچانا جا سکتا ہے، جو عموماً گھومنے کی تعدد کے پہلے اور دوسرے ہارمونکس ہوتے ہیں۔ شافٹوں کے متوازی غیر ہمراہی کی صورت میں کمپن بنیادی طور پر شعاعی سمت میں ہوتی ہے، جبکہ اگر شافٹ کسی زاویے پر ایک دوسرے کو قطع کرتے ہوں تو طولی کمپن غالب ہو سکتی ہے۔
اگر شافٹوں کو زاویے پر جوڑا جائے اور سخت جوڑ استعمال کیے جائیں تو مشین میں متبادل قوتیں کام کرنا شروع کر دیتی ہیں، جس سے شافٹوں اور جوڑوں کے گھسنے میں اضافہ ہو جاتا ہے۔ اس اثر کو لچکدار جوڑ استعمال کرنے سے نمایاں طور پر کم کیا جا سکتا ہے۔
ہوائی حرکیاتی تحریک کے باعث پنکھے کی کمپن
اهتزاز کی تحریک پنکھے کے پہیے کے ڈیزائن کے جامد اجزاء جیسے رہنما بلیڈز، موٹر یا بیئرنگ سپورٹس کے ساتھ تعامل، غیر درست گیپ ویلیوز، یا غیر مناسب انداز میں ڈیزائن کی گئی ہوا کی اندراج اور اخراج کی ساختوں کی وجہ سے پیدا ہو سکتی ہے۔ ان ذرائع کی ایک مخصوص خصوصیت یہ ہے کہ پہیے کی گھومنے کی تعدد سے منسلک دورانیاتی ارتعاش ہوا کے ساتھ پہیے کے بلیڈز کے تعامل میں بے ترتیب اتار چڑھاؤ کے پس منظر میں ظاہر ہوتا ہے۔ ارتعاش کو … پر مشاہدہ کیا جا سکتا ہے۔ بلیڈ فریکوئنسی ہارمونکس, جو پہیے کی گھومنے کی تعدد اور پہیے کے بلیڈز کی تعداد کا حاصل ضرب ہے۔.
ہوا کے بہاؤ کی ایرودینامک عدم استحکام، جو بلیڈ کی سطح پر رک جانے اور بعد ازاں گردشی طوفان بننے کی وجہ سے پیدا ہوتی ہے، وسیع بینڈ کمپن کا سبب بنتی ہے، جس کے طیفی خاکے کی شکل پنکھے کے بوجھ کے مطابق بدلتے رہتی ہے۔
ہوائی مزاحمتی شور کی خصوصیت یہ ہے کہ یہ پہیے کی گردش کی تعدد سے وابستہ نہیں ہوتا اور گردش کی تعدد کے ضمنی ہارمونکس (یعنی گردش کی تعدد سے کم تعددوں) پر پیدا ہو سکتا ہے۔ اس صورت میں پنکھے کے ہاؤسنگ اور نالیوں میں نمایاں کمپن دیکھی جا سکتی ہے۔
اگر پنکھے کے ایرودینامک نظام کو اس کی خصوصیات کے مطابق درست طور پر ترتیب نہ دیا جائے تو اس میں تیز جھٹکے پیدا ہو سکتے ہیں۔ یہ جھٹکے کان سے آسانی سے سنے جا سکتے ہیں اور پنکھے کے معاون نظام تک دھکوں کی صورت میں منتقل ہو جاتے ہیں۔
اگر مذکورہ بالا اسباب بلیڈ کی کمپن کا باعث بنیں تو اس کی نوعیت کا تعین ڈھانچے کے مختلف حصوں میں سینسرز نصب کرکے کیا جا سکتا ہے۔
تیل کی تہہ میں گھومنے کی وجہ سے پنکھے میں کمپن
سلائیڈنگ بیئرنگز کی چکنائی کی تہہ میں پیدا ہونے والی گونج ایک مخصوص تعدد پر دیکھی جاتی ہے جو روٹر کی گھومنے کی تعدد سے قدرے کم ہوتی ہے، جب تک کہ پنکھ پہلی تنقیدی رفتار سے زیادہ رفتار پر نہ چلے۔ دوسری صورت میں پہلی تنقیدی رفتار پر تیل کے ٹکڑے کی عدم استحکام دیکھی جائے گی، اور بعض اوقات اس اثر کو ارتدادی گونج کہا جاتا ہے۔
برقی نوعیت کے پنکھے کی کمپن کے ذرائع
موٹر روٹر کی غیر یکساں حرارت اس کے مڑنے کا سبب بن سکتی ہے، جس سے عدم توازن پیدا ہوتا ہے (جو پہلے ہارمونک پر ظاہر ہوتا ہے)۔
غیر ہم آہنگ موٹر کے معاملے میں، اگر کسی جزو کی تعدد گھومنے کی تعدد کو روٹر پلیٹس کی تعداد سے ضرب دے کر حاصل ہونے والی تعدد کے برابر ہو تو یہ اسٹاٹر پلیٹس سے متعلق نقائص کی نشاندہی کرتا ہے، اور اس کے برعکس، اگر جزو کی تعدد گھومنے کی تعدد کو روٹر پلیٹس کی تعداد سے ضرب دے کر حاصل ہونے والی تعدد کے برابر ہو تو یہ روٹر پلیٹس سے متعلق نقائص کی نشاندہی کرتا ہے۔
بہت سے برقی نوعیت کے ارتعاشاتی اجزاء اس بات سے پہچانے جاتے ہیں کہ جب بجلی کی فراہمی بند کی جاتی ہے تو وہ فوراً غائب ہو جاتے ہیں۔
بیلٹ ڈرائیو کی تحریک کی وجہ سے پنکھے میں کمپن
عمومی طور پر بیلٹ ڈرائیوز سے متعلق دو قسم کے مسائل ہوتے ہیں: جب ڈرائیو کے عمل پر بیرونی نقائص کا اثر پڑتا ہے اور جب نقائص خود بیلٹ میں ہوتے ہیں۔
پہلے معاملے میں، اگرچہ بیلٹ کمپن کر رہا ہے، یہ دوسرے ذرائع سے لگنے والی جبری قوتوں کی وجہ سے ہے، لہٰذا بیلٹ تبدیل کرنے سے مطلوبہ نتائج حاصل نہیں ہوں گے۔ ایسے قوتوں کے عام ذرائع ڈرائیو سسٹم میں عدم توازن، پولی کی غیر مرکزیت، غیر ہم راہنگی، اور ڈھیلے ہوئے میکینیکل کنکشنز ہیں۔ لہٰذا بیلٹس تبدیل کرنے سے پہلے کمپن کا تجزیہ کیا جانا چاہیے تاکہ تحریک کے ماخذ کی شناخت کی جا سکے۔
اگر بیلٹ بیرونی قوتوں کے تحت جواب دیتی ہیں تو ان کی ارتعاش کی تعدد غالباً تحریک کی تعدد کے برابر ہوگی۔ اس صورت میں تحریک کی تعدد کو اسٹروبوسکوپک لیمپ کے ذریعے طے کیا جا سکتا ہے، اسے اس طرح ایڈجسٹ کرکے کہ بیلٹ لیمپ کی روشنی میں ساکن نظر آئے۔
متعدد بیلٹ ڈرائیو کے معاملے میں، بیلٹ کے غیر مساوی تناؤ سے منتقل ہونے والی کمپن میں نمایاں اضافہ ہو سکتا ہے۔
وہ کیس جہاں کمپن کے ذرائع خود بیلٹیں ہوتی ہیں، ان کا تعلق ان کے جسمانی نقائص سے ہوتا ہے: دراڑیں، سخت اور نرم مقامات، بیلٹ کی سطح پر میل کچیل، سطح سے مواد کا غائب ہونا وغیرہ۔ وی بیلٹس کے لیے، ان کی چوڑائی میں تبدیلی سے بیلٹ پُلی کے راستے پر اوپر نیچے سرکتی ہے، جس سے اس کے تناؤ میں تبدیلی کے باعث کمپن پیدا ہوتی ہے۔
اگر کمپن کا ماخذ خود بیلٹ ہو تو کمپن کی تعددیں عموماً بیلٹ کی گھومنے کی تعدد کے ہارمونک ہوتی ہیں۔ ایک مخصوص صورت میں، تحریک کی تعدد عیب کی نوعیت اور پُلیوں کی تعداد، بشمول ٹینشنرز، پر منحصر ہوتی ہے۔
کچھ صورتوں میں کمپن کی شدت غیر مستحکم ہو سکتی ہے۔ یہ خاص طور پر کثیر بیلٹ ڈرائیوز کے لیے درست ہے۔
مکینیکل اور برقی نقائص کمپن کے ذرائع ہیں، جو بعد میں ہوائی شور میں تبدیل ہو جاتے ہیں۔ مکینیکل شور پنکھے یا موٹر کے عدم توازن، بیئرنگ کے شور، محور کی سیدھ، ڈکٹ کی دیوار اور ہاؤسنگ پینل کی کمپن، ڈیمپر بلیڈ کی کمپن، بلیڈ، ڈیمپر، پائپ اور سپورٹ کی کمپن، نیز ساخت کے ذریعے مکینیکل کمپن کی منتقلی سے منسلک ہو سکتا ہے۔ برقی شور مختلف اقسام کی برقی توانائی کی تبدیلی سے متعلق ہے: 1) مقناطیسی قوتیں مقناطیسی بہاؤ کی کثافت، قطبوں کی تعداد اور شکل، اور ہوا کے وقفے کی هندسی ساخت سے متعین ہوتی ہیں؛ 2) بے ترتیب برقی شور برشوں، آرکنگ، برقی چنگاریوں وغیرہ سے پیدا ہوتا ہے۔
ہوائی حرکی شور گرداب کی تشکیل، دباؤ کی لہروں، ہوا کے مزاحمت وغیرہ سے منسلک ہو سکتا ہے، اور اس کی نوعیت براڈ بینڈ اور نرو بینڈ دونوں ہو سکتی ہے۔ براڈ بینڈ شور مندرجہ ذیل وجوہات کی بنا پر پیدا ہو سکتا ہے: a) ہوا کے بہاؤ کے راستے میں بلیڈز، ڈیمپرز اور دیگر رکاوٹیں؛ b) پنکھے کی مجموعی گردش، بیلٹ، شگاف وغیرہ؛ c) ہوا کے بہاؤ کی سمت یا ڈکٹ کے عرضِ قطع میں اچانک تبدیلیاں، بہاؤ کی رفتار میں فرق، سرحدی اثرات کی وجہ سے بہاؤ کا علیحدہ ہونا، بہاؤ کی دباؤ کے اثرات وغیرہ۔ ناروبینڈ شور مندرجہ ذیل وجوہات کی بنا پر پیدا ہو سکتا ہے: ا) گونج (آرگن پائپ اثر، تاروں کی کمپن، پینل، ساختی عناصر کی کمپن وغیرہ)؛ ب) تیز کناروں پر گرداب کی تشکیل (ہوا کے کالم کی تحریک)؛ ج) گردش (سائرن اثر، دراڑیں، سوراخ، گھومتے حصوں پر سلاٹس)۔
ساخت کے مختلف مکینیکل عناصر کے درمیان رابطے سے پیدا ہونے والے اثرات ہتھوڑے کے بلو، تھنڈر رول، گونجنے والے خالی خانے وغیرہ سے پیدا ہونے والی آواز کی طرح ہی شور پیدا کرتے ہیں۔ گیئر کے دانتوں کے اثرات اور بیلٹ کی ناقص تالیوں سے اثر کی آوازیں سنی جا سکتی ہیں۔ امپیکٹ امپلز اس قدر مبہم ہو سکتے ہیں کہ متواتر اثرات کو عارضی عمل سے الگ کرنے کے لیے خاص تیز رفتار ریکارڈنگ کے آلات کی ضرورت ہوتی ہے۔ وہ علاقہ جہاں بہت سے اثرات مرتب ہوتے ہیں، ان کی چوٹیوں کا سپرمپوزیشن ایک مستقل ہم اثر پیدا کرتا ہے۔
فین سپورٹ کی قسم پر کمپن کا انحصار
اس کے ہموار، پریشانی سے پاک آپریشن کے لیے پنکھے کی مدد یا فاؤنڈیشن ڈیزائن کا صحیح انتخاب ضروری ہے۔ پنکھے، موٹر اور دیگر ڈرائیو ڈیوائسز کو انسٹال کرتے وقت گھومنے والے اجزاء کی سیدھ کو یقینی بنانے کے لیے، اسٹیل کا فریم یا مضبوط کنکریٹ بیس استعمال کیا جاتا ہے۔ بعض اوقات سپورٹ کنسٹرکشن پر بچت کرنے کی کوشش مشین کے اجزاء کی مطلوبہ سیدھ کو برقرار رکھنے میں ناکامی کا باعث بنتی ہے۔ یہ خاص طور پر ناقابل قبول ہے جب کمپن سیدھ میں ہونے والی تبدیلیوں کے لیے حساس ہو، خاص طور پر ان مشینوں کے لیے جو دھاتی بندھنوں سے جڑے ہوئے الگ الگ حصوں پر مشتمل ہوں۔
جس بنیاد پر بنیاد رکھی گئی ہے وہ پنکھے اور موٹر وائبریشن کو بھی متاثر کر سکتی ہے۔ اگر فاؤنڈیشن کی قدرتی فریکوئنسی پنکھے یا موٹر کی گردشی فریکوئنسی کے قریب ہے تو، پنکھے کے آپریشن کے دوران فاؤنڈیشن گونجے گی۔ یہ فاؤنڈیشن، ارد گرد کے فرش، اور پنکھے کے سپورٹ پر کئی پوائنٹس پر کمپن کی پیمائش کرکے پتہ لگایا جا سکتا ہے۔ اکثر گونج کے حالات میں، عمودی کمپن جزو افقی سے نمایاں طور پر بڑھ جاتا ہے۔ فاؤنڈیشن کو سخت بنا کر یا اس کی کمیت کو بڑھا کر کمپن کو کم کیا جا سکتا ہے۔ یہاں تک کہ اگر عدم توازن اور غلط فہمی کو ختم کر دیا جائے، زبردستی قوتوں کو کم کرنے کی اجازت دے کر، اہم کمپن کی پیشگی شرائط اب بھی موجود ہو سکتی ہیں۔ اس کا مطلب یہ ہے کہ اگر پنکھا، اس کے تعاون کے ساتھ، گونج کے قریب ہے، قابل قبول کمپن اقدار کو حاصل کرنے کے لیے ایسی مشینوں کے لیے عام طور پر درکار شافٹ کی سیدھ میں زیادہ درست توازن اور زیادہ درست شافٹ الائنمنٹ کی ضرورت ہوگی۔ یہ صورت حال ناپسندیدہ ہے اور سپورٹ یا کنکریٹ بلاک کے بڑے پیمانے پر اور/یا سختی میں اضافہ کرنے سے گریز کیا جانا چاہیے۔
وائبریشن کنڈیشن مانیٹرنگ اینڈ ڈائیگناسٹک گائیڈ
مشین وائبریشن کنڈیشن مانیٹرنگ کا بنیادی اصول (اس کے بعد کنڈیشن کہا جاتا ہے) یہ ہے کہ مناسب طریقے سے منصوبہ بند پیمائش کے نتائج کا مشاہدہ کیا جائے تاکہ کمپن کی سطح میں اضافے کے رجحان کی نشاندہی کی جا سکے اور ممکنہ مسائل کے تناظر میں اس پر غور کیا جا سکے۔ نگرانی ان حالات میں لاگو ہوتی ہے جہاں نقصان آہستہ آہستہ بڑھتا ہے، اور میکانزم کی حالت کی خرابی قابل پیمائش جسمانی علامات کے ذریعے ظاہر ہوتی ہے۔
جسمانی نقائص کی نشوونما کے نتیجے میں پنکھے کی کمپن کو کچھ وقفوں پر مانیٹر کیا جا سکتا ہے، اور جب کمپن کی سطح میں اضافے کا پتہ چل جاتا ہے، تو مشاہدے کی فریکوئنسی کو بڑھایا جا سکتا ہے، اور حالت کا تفصیلی تجزیہ کیا جا سکتا ہے۔ اس صورت میں، کمپن کی تبدیلیوں کی وجوہات کو کمپن فریکوئنسی تجزیہ کی بنیاد پر شناخت کیا جا سکتا ہے، جو نقصان کے شدید ہونے سے بہت پہلے ضروری اقدامات کا تعین کرنے اور ان کے نفاذ کی منصوبہ بندی کرنے کی اجازت دیتا ہے۔ عام طور پر، اقدامات کو ضروری سمجھا جاتا ہے جب کمپن کی سطح بیس لائن کی سطح کے مقابلے میں 1.6 گنا یا 4 ڈی بی بڑھ جاتی ہے۔
حالت کی نگرانی کا پروگرام کئی مراحل پر مشتمل ہوتا ہے، جسے مختصراً درج ذیل بنایا جا سکتا ہے۔
- a) پنکھے کی حالت کی شناخت کریں اور بیس لائن وائبریشن لیول کا تعین کریں (یہ مختلف تنصیب کے طریقوں وغیرہ کی وجہ سے فیکٹری ٹیسٹ کے دوران حاصل کردہ سطح سے مختلف ہو سکتا ہے)؛
- b) کمپن پیمائش پوائنٹس کا انتخاب کریں؛
- c) مشاہدے (پیمائش) تعدد کا تعین کریں؛
- d) معلومات کے اندراج کا طریقہ کار قائم کرنا؛
- e) پنکھے کی کمپن حالت کا اندازہ لگانے کے معیار کا تعین کریں، مطلق کمپن اور کمپن کی تبدیلیوں کے لیے قدروں کو محدود کریں، اسی طرح کی مشینوں کو چلانے کے تجربے کا خلاصہ کریں۔
چونکہ پنکھے عام طور پر بغیر کسی دشواری کے اس رفتار پر کام کرتے ہیں جو اہم تک نہیں پہنچتی ہے، اس لیے ہلکی رفتار یا بوجھ میں تبدیلی کے ساتھ وائبریشن لیول کو نمایاں طور پر تبدیل نہیں ہونا چاہیے، لیکن یہ نوٹ کرنا ضروری ہے کہ جب پنکھا متغیر گردشی رفتار کے ساتھ کام کرتا ہے، تو کمپن کی قائم کردہ حد کی اقدار لاگو ہوتی ہیں۔ زیادہ سے زیادہ آپریٹنگ گردشی رفتار تک۔ اگر زیادہ سے زیادہ گردش کی رفتار کو کمپن کی قائم کردہ حد کے اندر نہیں پہنچایا جا سکتا ہے، تو یہ ایک سنگین مسئلہ کی موجودگی کی نشاندہی کر سکتا ہے اور اس کے لیے خصوصی تحقیقات کی ضرورت ہے۔
ضمیمہ سی میں فراہم کردہ کچھ تشخیصی سفارشات پنکھے کے آپریشن کے تجربے پر مبنی ہیں اور ان کا مقصد کمپن بڑھنے کی وجوہات کا تجزیہ کرتے وقت ترتیب وار اطلاق کے لیے ہے۔
کسی مخصوص پنکھے کی وائبریشن کا معیاری اندازہ لگانے اور مزید کارروائیوں کے لیے رہنما خطوط کا تعین کرنے کے لیے، ISO 10816-1 کے ذریعے قائم وائبریشن کنڈیشن زون کی حدود کو استعمال کیا جا سکتا ہے۔
یہ توقع کی جاتی ہے کہ نئے شائقین کے لیے، ان کی وائبریشن لیولز ٹیبل 3 میں دی گئی قدروں کی حد سے نیچے ہوں گی۔ یہ قدریں ISO 10816-1 کے مطابق کمپن کی حالت کے زون A کی حد سے مطابقت رکھتی ہیں۔ وارننگ اور شٹ ڈاؤن لیولز کے لیے تجویز کردہ اقدار مخصوص قسم کے مداحوں پر جمع کی گئی معلومات کے تجزیہ کی بنیاد پر قائم کی جاتی ہیں۔
تعمیل کی معلومات
حوالہ بین الاقوامی معیارات جو اس معیار میں معیاری حوالہ جات کے طور پر استعمال ہوتے ہیں
ٹیبل H.1
|
حوالہ بین ریاستی معیار کا عہدہ
|
حوالہ بین الاقوامی معیار کا عہدہ اور عنوان اور حوالہ بین ریاستی معیار کے ساتھ تعمیل کی اس کی ڈگری کا مشروط عہدہ
|
|
آئی ایس او ۱۹۴۰-۱-۲۰۰۷
|
آئی ایس او 1940-1:1986۔ تھرتھراہٹ۔ سخت روٹرز کے توازن کے معیار کے تقاضے حصہ 1۔ قابل اجازت عدم توازن (IDT) کا تعین
|
|
آئی ایس او ۵۳۴۸-۲۰۰۲
|
ISO 5348:1999۔ کمپن اور شاک۔ ایکسلرومیٹر کی مکینیکل ماؤنٹنگ (IDT)
|
|
آئی ایس او ۷۹۱۹-۱-۲۰۰۲
|
ISO 7919-1:1996۔ نان ریسیپروکیٹنگ مشینوں کا کمپن۔ گھومنے والی شافٹ اور تشخیص کے معیار پر پیمائش۔ حصہ 1۔ عمومی رہنما خطوط (IDT)
|
|
آئی ایس او ۱۰۸۱۶-۱-۹۷
|
ISO 10816-1:1995۔ تھرتھراہٹ۔ غیر گھومنے والے حصوں پر کمپن کی پیمائش کے ذریعہ مشین کی حالت کا اندازہ۔ حصہ 1۔ عمومی رہنما خطوط (IDT)
|
|
آئی ایس او ۱۰۸۱۶-۳-۲۰۰۲
|
ISO 10816-3:1998۔ تھرتھراہٹ۔ غیر گھومنے والے حصوں پر کمپن کی پیمائش کے ذریعہ مشین کی حالت کا اندازہ۔ حصہ 3. 15 کلو واٹ سے زیادہ کی برائے نام طاقت اور 120 سے 15000 rpm کی برائے نام رفتار کے ساتھ صنعتی مشینیں، ان سیٹو پیمائش (IDT)
|
|
آئی ایس او ۱۰۹۲۱-۹۰
|
ISO 5801:1997۔ صنعتی پرستار۔ معیاری نالیوں کا استعمال کرتے ہوئے کارکردگی کی جانچ (NEQ)
|
|
آئی ایس او 19534-74
|
آئی ایس او 1925:2001۔ تھرتھراہٹ۔ توازن ذخیرہ الفاظ (NEQ)
|
|
آئی ایس او ۲۴۳۴۶-۸۰
|
آئی ایس او 2041:1990۔ کمپن اور شاک۔ ذخیرہ الفاظ (NEQ)
|
|
آئی ایس او ۳۱۳۲۲-۲۰۰۶ (آئی ایس او ۸۸۲۱:۱۹۸۹)
|
ISO 8821:1989۔ تھرتھراہٹ۔ توازن شافٹ اور فٹڈ پارٹس (MOD) کو متوازن کرتے وقت کی وے اثر کے لیے اکاؤنٹنگ کے لیے رہنما اصول
|
|
آئی ایس او ۳۱۳۵۱-۲۰۰۷ (آئی ایس او ۱۴۶۹۵:۲۰۰۳)
|
آئی ایس او 14695:2003۔ صنعتی پرستار۔ کمپن کی پیمائش کے طریقے (MOD)
|
|
نوٹ: اس ٹیبل میں معیار کی تعمیل کی ڈگری کے مندرجہ ذیل مشروط عہدوں کا استعمال کیا گیا ہے: IDT - ایک جیسے معیارات؛
|
|
Categories: پمپ کے گھومنے والے پرزےمثال

0 Comments