
การถ่วงสมดุลพัดลม
(ใช้ข้อมูลจาก GOST 31350-2007 “VIBRATION. INDUSTRIAL FANS. REQUIREMENTS FOR PRODUCED VIBRATION AND BALANCING QUALITY” — มาตรฐานระหว่างรัฐที่พัฒนามาจาก ISO 14694:2003 “Industrial fans — Specifications for balance quality and vibration levels”)
หมายเหตุแหล่งข้อมูล: หน้านี้อ้างอิงข้อกำหนดการสั่นสะเทือนของพัดลมและคุณภาพการถ่วงสมดุลที่เทียบเท่ากับ ISO 14694:2003 และฉบับรับรองมาตรฐาน ISO ในกลุ่ม GOST ที่เกี่ยวข้อง ซึ่งใช้เลขมาตรฐานต่างจากเลขสิ่งพิมพ์ ISO ต้นฉบับ ในกรณีที่มีการใช้คำศัพท์เก่าของ ISO 1940-1 มาตรฐานคุณภาพการถ่วงสมดุลปัจจุบันคือ ISO 21940-11 (เดิมคือ ISO 1940-1)
การสั่นสะเทือน การสั่นสะเทือนที่เกิดจากพัดลมถือเป็นคุณลักษณะทางเทคนิคที่สำคัญที่สุดประการหนึ่ง บ่งบอกถึงคุณภาพของการออกแบบและการผลิตผลิตภัณฑ์ การสั่นสะเทือนที่เพิ่มขึ้นอาจบ่งบอกถึงการติดตั้งพัดลมที่ไม่เหมาะสม การเสื่อมสภาพของสภาวะทางเทคนิค ฯลฯ ด้วยเหตุนี้ การสั่นสะเทือนของพัดลมมักจะถูกวัดในระหว่างการทดสอบการยอมรับ ระหว่างการติดตั้งก่อนการทดสอบการใช้งาน เช่นเดียวกับเมื่อดำเนินโปรแกรมตรวจสอบสภาพเครื่องจักร ข้อมูลการสั่นสะเทือนของพัดลมยังใช้ในการออกแบบส่วนรองรับและระบบที่เชื่อมต่อ (ท่อ) การวัดการสั่นสะเทือนโดยปกติจะดำเนินการโดยใช้ช่องดูดและระบายแบบเปิด แต่ควรสังเกตว่าการสั่นสะเทือนของพัดลมอาจแตกต่างกันอย่างมากตามการเปลี่ยนแปลงของอากาศพลศาสตร์ของการไหลของอากาศ ความเร็วในการหมุน และคุณลักษณะอื่นๆ
GOST ISO 10816-1-97 (ISO 10816-1:1995), GOST ISO 10816-3-2002 (ISO 10816-3:1998), และ GOST 31351-2007 (ISO 14695:2003) กำหนดวิธีการวัดและตำแหน่งติดตั้งเซ็นเซอร์การสั่นสะเทือน หากมีการวัดการสั่นสะเทือนเพื่อประเมินผลกระทบต่อท่อลมหรือฐานพัดลม จุดวัดจะถูกเลือกให้เหมาะสมตามนั้น
การวัดการสั่นสะเทือนของพัดลมอาจมีค่าใช้จ่ายสูง และบางครั้งอาจสูงกว่าต้นทุนการผลิตผลิตภัณฑ์เองอย่างมาก ดังนั้น ข้อจำกัดใด ๆ สำหรับค่าขององค์ประกอบการสั่นสะเทือนแบบไม่ต่อเนื่องแต่ละตัวหรือพารามิเตอร์การสั่นสะเทือนในย่านความถี่ ควรกำหนดขึ้นเฉพาะเมื่อการเกินค่าดังกล่าวบ่งชี้ว่าพัดลมขัดข้องเท่านั้น จำนวนจุดวัดการสั่นสะเทือนควรถูกจำกัดตามวัตถุประสงค์ของการใช้ผลการวัดด้วย โดยทั่วไป การวัดการสั่นสะเทือนที่ส่วนรองรับพัดลมก็เพียงพอสำหรับการประเมินสถานะการสั่นสะเทือนของพัดลม
ฐานคือส่วนที่ติดตั้งพัดลมและส่วนที่ให้การสนับสนุนที่จำเป็นสำหรับพัดลม เลือกมวลและความแข็งของฐานเพื่อป้องกันการขยายการสั่นสะเทือนที่ส่งผ่านฐาน
ส่วนรองรับมีสองประเภท:
- ส่วนรองรับแบบยืดหยุ่น: ระบบรองรับพัดลมที่ออกแบบให้ความถี่ธรรมชาติอันดับแรกของส่วนรองรับต่ำกว่าความถี่การหมุนขณะทำงานของพัดลมอย่างมาก เมื่อกำหนดระดับความยืดหยุ่นของส่วนรองรับ ควรคำนึงถึงชิ้นแทรกยืดหยุ่นระหว่างพัดลมกับโครงสร้างรองรับ ความยืดหยุ่นของส่วนรองรับทำได้โดยแขวนพัดลมบนสปริงหรือวางส่วนรองรับบนองค์ประกอบยืดหยุ่น (สปริง ตัวแยกยาง ฯลฯ) ความถี่ธรรมชาติของระบบช่วงล่าง – พัดลม โดยทั่วไปน้อยกว่า 25% ของความถี่ที่สอดคล้องกับความเร็วรอบต่ำสุดของพัดลมที่ทดสอบ
- ส่วนรองรับแบบแข็ง: ระบบรองรับพัดลมที่ออกแบบให้ความถี่ธรรมชาติอันดับแรกของส่วนรองรับสูงกว่าความถี่การหมุนขณะทำงานอย่างมาก ความแข็งของฐานพัดลมเป็นค่าเชิงสัมพัทธ์ และควรพิจารณาเปรียบเทียบกับความแข็งของตลับลูกปืนของเครื่องจักร อัตราส่วนระหว่างการสั่นสะเทือนของตัวเรือนตลับลูกปืนกับการสั่นสะเทือนของฐานแสดงถึงอิทธิพลของความยืดหยุ่นของฐาน ฐานสามารถถือว่าแข็งและมีมวลเพียงพอได้ หากแอมพลิจูดการสั่นสะเทือนของฐาน (ในทิศทางใดก็ตาม) ใกล้กับฐานรองเครื่องหรือโครงรองรับ มีค่าน้อยกว่า 25% ของผลการวัดการสั่นสะเทือนสูงสุดที่ได้จากส่วนรองรับตลับลูกปืนที่ใกล้ที่สุด (ในทิศทางใดก็ตาม)
เนื่องจากมวลและความแข็งของฐานชั่วคราวที่ติดตั้งพัดลมในระหว่างการทดสอบจากโรงงานอาจแตกต่างกันอย่างมากจากเงื่อนไขการติดตั้งที่สถานที่ปฏิบัติงาน ค่าขีดจำกัดของเงื่อนไขโรงงานจะนำไปใช้กับการสั่นสะเทือนของแถบความถี่แคบในช่วงความถี่การหมุน และสำหรับ การทดสอบพัดลมนอกสถานที่ – เพื่อการสั่นสะเทือนแบบบรอดแบนด์ เพื่อกำหนดสถานะการสั่นสะเทือนโดยรวมของเครื่อง สถานที่ปฏิบัติงานคือตำแหน่งการติดตั้งสุดท้ายของพัดลม ซึ่งมีการกำหนดเงื่อนไขการทำงานไว้
หมวดหมู่พัดลม (หมวดหมู่ BV)
พัดลมถูกจัดประเภทตามลักษณะการใช้งานที่ตั้งใจไว้, ชั้นความแม่นยำของการถ่วงสมดุล, และค่าขีดจำกัดพารามิเตอร์การสั่นสะเทือนที่แนะนำ การออกแบบและวัตถุประสงค์ของพัดลมเป็นเกณฑ์ที่ใช้ในการจัดประเภทพัดลมหลายประเภทตามที่ยอมรับได้ ความไม่สมดุล ค่าและระดับการสั่นสะเทือน (BV-categories).
ตารางที่ 1 นำเสนอประเภทพัดลมที่สามารถระบุได้ตามเงื่อนไขการใช้งาน โดยพิจารณาจากค่าความไม่สมดุลและระดับการสั่นสะเทือนที่อนุญาต ประเภทพัดลมถูกกำหนดโดยผู้ผลิต
ตารางที่ 1 – หมวดหมู่พัดลม
| เงื่อนไขการใช้งาน | ตัวอย่าง | กำลังไฟฟ้าที่ใช้, kW | หมวด BV |
| พื้นที่ที่อยู่อาศัยและสำนักงาน | พัดลมเพดานและห้องใต้หลังคา, เครื่องปรับอากาศแบบหน้าต่าง | ≤ 0.15 | บีวี-1 |
| > 0.15 | บีวี-2 | ||
| อาคารและสถานที่เกษตรกรรม | พัดลมสำหรับระบบระบายอากาศและปรับอากาศ; พัดลมในอุปกรณ์แบบติดตั้งเป็นชุด | ≤ 3.7 | บีวี-2 |
| > 3.7 | บีวี-3 | ||
| กระบวนการทางอุตสาหกรรมและการผลิตไฟฟ้า | พัดลมในพื้นที่ปิด เหมือง สายพานลำเลียง หม้อไอน้ำ อุโมงค์ลม ระบบทำความสะอาดแก๊ส | ≤ 300 | บีวี-3 |
| > 300 | ดู ISO 10816-3 | ||
| การขนส่งรวมทั้งเรือเดินทะเล | พัดลมบนหัวรถจักร รถบรรทุก และรถยนต์ | ≤ 15 | บีวี-3 |
| > 15 | บีวี-4 | ||
| อุโมงค์ | พัดลมระบายอากาศสำหรับรถไฟใต้ดิน อุโมงค์ อู่ซ่อมรถ | ≤ 75 | บีวี-3 |
| > 75 | บีวี-4 | ||
| ใดๆ | บีวี-4 | ||
| การผลิตปิโตรเคมี | พัดลมสำหรับกำจัดก๊าซอันตราย และใช้ในกระบวนการทางเทคโนโลยีอื่นๆ | ≤ 37 | บีวี-3 |
| > 37 | บีวี-4 | ||
| การผลิตชิปคอมพิวเตอร์ | พัดลมสำหรับสร้างห้องสะอาด | ใดๆ | บีวี-5 |
| หมายเหตุ
1 มาตรฐานนี้พิจารณาเฉพาะพัดลมที่มีกำลังไฟฟ้าน้อยกว่า 300 กิโลวัตต์เท่านั้น การประเมินการสั่นสะเทือนของพัดลมที่มีกำลังไฟฟ้ามากกว่าเป็นไปตามมาตรฐาน ISO 10816-3 อย่างไรก็ตาม มอเตอร์ไฟฟ้าแบบมาตรฐานซีรีส์อาจมีกำลังไฟฟ้าที่กำหนดสูงถึง 355 กิโลวัตต์ พัดลมที่ใช้มอเตอร์ไฟฟ้าดังกล่าวควรได้รับการยอมรับตามมาตรฐานนี้
2 ตารางที่ 1 ไม่ใช้กับพัดลมแกนเบาความเร็วต่ำขนาดเส้นผ่านศูนย์กลางใหญ่ (โดยทั่วไป 2800 ถึง 12500 mm) ที่ใช้ในเครื่องแลกเปลี่ยนความร้อน หอหล่อเย็น ฯลฯ ชั้นความแม่นยำการถ่วงสมดุลสำหรับพัดลมดังกล่าวควรเป็น G16 และหมวดพัดลม – BV-3
|
|||
เมื่อซื้อชิ้นส่วนโรเตอร์แต่ละชิ้น (ล้อหรือใบพัด) เพื่อติดตั้งในภายหลังบนพัดลม ควรปฏิบัติตามระดับความแม่นยำในการปรับสมดุลของชิ้นส่วนเหล่านี้ (ดูตารางที่ 2) และเมื่อซื้อพัดลมทั้งชุด ควรพิจารณาผลการทดสอบการสั่นสะเทือนจากโรงงาน (ตารางที่ 4) และการสั่นสะเทือนในสถานที่ (ตารางที่ 5) ด้วย โดยทั่วไปแล้ว คุณลักษณะเหล่านี้จะได้รับการตกลงกันไว้แล้ว ดังนั้นการเลือกพัดลมจึงสามารถทำได้โดยอิงจากหมวดหมู่ BV ของพัดลม
หมวดที่กำหนดไว้ในตารางที่ 1 เป็นหมวดทั่วไปสำหรับการใช้งานพัดลมตามปกติ แต่ในกรณีที่มีเหตุผลสมควร ลูกค้าอาจร้องขอพัดลมที่มีหมวด BV แตกต่างออกไปได้ ขอแนะนำให้ระบุหมวด BV ของพัดลม ชั้นความแม่นยำการถ่วงสมดุล และระดับการสั่นสะเทือนที่ยอมรับได้ไว้ในสัญญาจัดหาอุปกรณ์
สามารถทำข้อตกลงแยกต่างหากระหว่างลูกค้าและผู้ผลิตเกี่ยวกับเงื่อนไขการติดตั้งพัดลม เพื่อให้การทดสอบพัดลมที่ประกอบเสร็จแล้วในโรงงานคำนึงถึงเงื่อนไขการติดตั้งที่วางแผนไว้ ณ สถานที่ปฏิบัติงานได้ ในกรณีที่ไม่มีข้อตกลงดังกล่าว จะไม่มีข้อจำกัดเกี่ยวกับประเภทของฐาน (แบบแข็งหรือแบบยืดหยุ่น) สำหรับการทดสอบในโรงงาน
การถ่วงสมดุลพัดลม
บทบัญญัติทั่วไป
ผู้ผลิตพัดลมรับผิดชอบ การถ่วงสมดุล พัดลมตามเอกสารกำกับดูแลที่เกี่ยวข้อง มาตรฐานนี้อิงตามข้อกำหนดของ ISO 1940-1. การปรับสมดุลมักดำเนินการบนอุปกรณ์ที่มีความไวสูงและออกแบบมาเป็นพิเศษ เครื่องปรับสมดุล, ทำให้สามารถประเมินได้อย่างถูกต้อง ความไม่สมดุลคงเหลือ.
ชั้นความแม่นยำการถ่วงสมดุลของพัดลม
ชั้นความแม่นยำในการถ่วงสมดุลสำหรับล้อพัดลมจะถูกนำไปใช้ตามตารางที่ 2 ผู้ผลิตพัดลมสามารถทำการถ่วงสมดุลสำหรับองค์ประกอบหลายอย่างในชุดประกอบ ซึ่งอาจรวมถึงล้อ, เพลา, ข้อต่อ, รอก ฯลฯ นอกเหนือจากล้อแล้ว องค์ประกอบในการประกอบแต่ละชิ้นอาจต้องการการถ่วงสมดุลด้วยเช่นกัน
ตารางที่ 2 – ชั้นความแม่นยำการถ่วงสมดุล
|
หมวดพัดลม
|
ชั้นความแม่นยำการถ่วงสมดุลของโรเตอร์ (ล้อ)
|
|
บีวี-1
|
G16
|
|
บีวี-2
|
G16
|
|
บีวี-3
|
G6.3
|
|
บีวี-4
|
G2.5
|
|
บีวี-5
|
G1.0
|
|
หมายเหตุ: พัดลมในหมวดหมู่ BV-1 สามารถรวมถึงพัดลมขนาดเล็กที่มีน้ำหนักน้อยกว่า 224 กรัม ซึ่งยากที่จะรักษาความแม่นยำในการปรับสมดุลตามที่ระบุไว้ ในกรณีนี้ ความสม่ำเสมอของการกระจายมวลสัมพันธ์กับแกนหมุนของพัดลมควรได้รับการประกันโดยเทคโนโลยีการผลิต
|
|
การวัดการสั่นสะเทือนของพัดลม
ข้อกำหนดการวัด
บทบัญญัติทั่วไป
Figures 1 – 4 แสดงจุดวัดและทิศทางที่เป็นไปได้บางส่วนบนตลับลูกปืนพัดลมแต่ละตัว ค่าที่ให้ไว้ใน table 4 อ้างอิงการวัดในทิศทางตั้งฉากกับแกนหมุน จำนวนและตำแหน่งของจุดวัดทั้งสำหรับการทดสอบจากโรงงานและการวัดหน้างานกำหนดโดยดุลยพินิจของผู้ผลิตหรือโดยข้อตกลงกับลูกค้า แนะนำให้วัดบนตลับลูกปืนของเพลาล้อพัดลม (impeller) หากทำไม่ได้ ควรติดตั้งเซ็นเซอร์ในตำแหน่งที่มีการเชื่อมต่อเชิงกลกับตลับลูกปืนสั้นที่สุด ไม่ควรติดตั้งเซ็นเซอร์บนแผงที่ไม่มีการรองรับ ตัวเรือนพัดลม องค์ประกอบของฝาครอบ หรือจุดอื่นที่ไม่ได้เชื่อมต่อกับตลับลูกปืนโดยตรง (ผลการวัดดังกล่าวสามารถใช้ได้ แต่ไม่ใช่เพื่อประเมินสภาพการสั่นสะเทือนของพัดลม ใช้เพื่อรับข้อมูลการสั่นสะเทือนที่ส่งไปยังท่อลมหรือฐานเท่านั้น – ดู ISO 14695 (GOST 31351) และ ISO 5348)
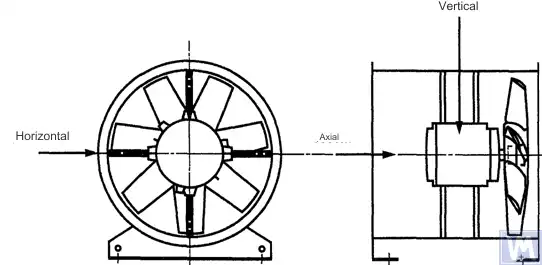
รูปที่ 1. ตำแหน่งของเซ็นเซอร์สามแกนสำหรับพัดลมแกนที่ติดตั้งในแนวนอน
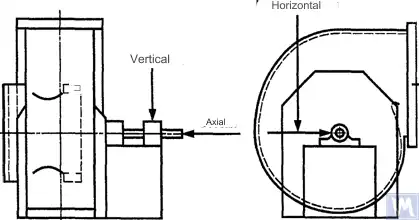
รูปที่ 2. ตำแหน่งของเซ็นเซอร์สามแกนสำหรับพัดลมแรงเหวี่ยงแบบดูดทางเดียว
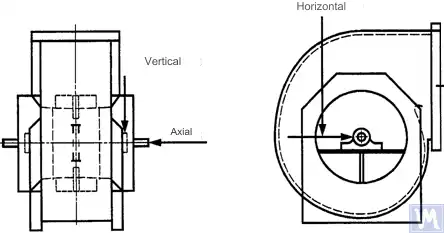
รูปที่ 3. ตำแหน่งของเซ็นเซอร์สามแกนสำหรับพัดลมแรงเหวี่ยงแบบดูดสองทาง
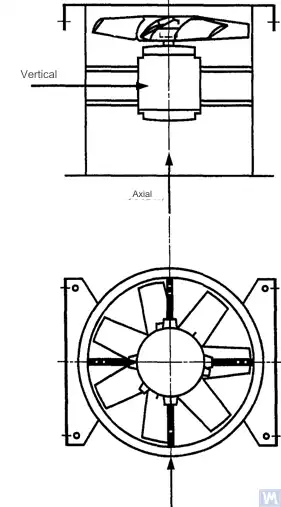
รูปที่ 4. ตำแหน่งของเซ็นเซอร์สามพิกัดสำหรับพัดลมแกนตั้งที่ติดตั้งในแนวตั้ง
การวัดในทิศทางแนวนอนควรดำเนินการในมุมฉากกับแกนเพลา การวัดในทิศทางแนวตั้งควรดำเนินการในมุมฉากกับทิศทางการวัดแนวนอนและตั้งฉากกับเพลาพัดลม การวัดในทิศทางตามยาวควรดำเนินการขนานกับแกนเพลา
การวัดโดยใช้เซ็นเซอร์ประเภทความเฉื่อย
ค่าการสั่นสะเทือนทั้งหมดที่ระบุในมาตรฐานนี้อ้างอิงจากการวัดโดยใช้เซ็นเซอร์ประเภทความเฉื่อย ซึ่งสัญญาณของเซ็นเซอร์จะจำลองการเคลื่อนไหวของตัวเรือนตลับลูกปืน
เซ็นเซอร์ที่ใช้สามารถเป็นได้ทั้งเครื่องวัดความเร่งหรือเครื่องวัดความเร็ว ควรให้ความสนใจเป็นพิเศษกับการติดตั้งเซ็นเซอร์ให้ถูกต้อง: โดยไม่มีช่องว่างบนพื้นผิวรองรับ, ไม่มีการแกว่งและการสั่นสะเทือน การติดตั้งเซ็นเซอร์และระบบติดตั้งไม่ควรมีขนาดใหญ่หรือมีน้ำหนักมากเกินไปเพื่อหลีกเลี่ยงการเปลี่ยนแปลงที่สำคัญในแรงสั่นสะเทือนที่วัดได้ ความผิดพลาดทั้งหมดที่เกิดจากวิธีการติดตั้งเซ็นเซอร์และการปรับเทียบระบบวัดไม่ควรเกิน +/- 10% ของค่าที่วัดได้
การวัดโดยใช้เซ็นเซอร์แบบไม่สัมผัส
ตามข้อตกลงระหว่างผู้ใช้และผู้ผลิต ข้อกำหนดสำหรับค่าการเคลื่อนที่สูงสุดที่อนุญาตของเพลา (ดู ISO 7919-1) ภายในตลับลูกปืนแบบเลื่อนอาจถูกกำหนดขึ้น การวัดที่เกี่ยวข้องสามารถดำเนินการได้โดยใช้เซ็นเซอร์แบบไม่สัมผัส
ในกรณีนี้ ระบบการวัดจะกำหนดการเคลื่อนที่ของผิวหน้าเพลาเมื่อเทียบกับตัวเรือนแบริ่ง เป็นที่ชัดเจนว่าค่าการเคลื่อนที่สูงสุดที่อนุญาตไม่ควรเกินค่าความห่างของแบริ่ง ค่าความห่างนี้ขึ้นอยู่กับขนาดและประเภทของแบริ่ง, แรงที่กระทำ (แรงรัศมีหรือแรงตามแนวแกน), และทิศทางการวัด (บางการออกแบบของแบริ่งมีรูเป็นรูปวงรี ซึ่งค่าความห่างในแนวนอนจะมากกว่าในแนวตั้ง) ความหลากหลายของปัจจัยที่ต้องพิจารณาทำให้ไม่สามารถกำหนดขีดจำกัดการเคลื่อนที่ของเพลาได้เป็นมาตรฐานเดียวกัน แต่มีคำแนะนำบางประการที่นำเสนอไว้ในตาราง 3 ค่าที่ระบุไว้ในตารางนี้เป็นเปอร์เซ็นต์ของค่าความเผื่อรัศมีทั้งหมดในตลับลูกปืนในแต่ละทิศทาง
ตารางที่ 3 – การเคลื่อนที่สัมพัทธ์สูงสุดของเพลาภายในตลับลูกปืน
| สถานะการสั่นสะเทือนของพัดลม | ค่าการกระจัดสูงสุดที่แนะนำ เป็นเปอร์เซ็นต์ของค่าระยะเคลียรันซ์ (ตามแกนใด ๆ) |
| สภาวะระหว่างการเดินเครื่อง/สภาวะน่าพอใจ | น้อยกว่า 25% |
| คำเตือน | +50% |
| ปิดระบบ | +70% |
| 1) ค่าความเผื่อรัศมีและความเผื่อแกนสำหรับตลับลูกปืนแต่ละชนิดควรได้รับจากผู้จัดจำหน่าย | |
ค่าที่ระบุไว้ได้คำนึงถึงการเคลื่อนที่ที่ "ไม่ถูกต้อง" ของผิวแกนแล้ว การเคลื่อนที่ที่ "ไม่ถูกต้อง" เหล่านี้ปรากฏในผลการวัดเนื่องจากนอกเหนือจากการสั่นสะเทือนของแกนแล้ว การวิ่งคลาดเคลื่อนทางกลยังส่งผลต่อผลลัพธ์เหล่านี้ด้วยหากแกนมีการงอหรือมีรูปร่างที่ไม่กลม เมื่อใช้เซ็นเซอร์แบบไม่สัมผัส ผลการวัดจะรวมถึงการวิ่งออกทางไฟฟ้าที่เกิดจากคุณสมบัติทางแม่เหล็กและไฟฟ้าของวัสดุแกนที่จุดวัดด้วย เชื่อว่าในระหว่างการทดสอบการทำงานและการใช้งานปกติของพัดลมในช่วงเวลาต่อมา ช่วงรวมของการวิ่งออกทางกลไกและไฟฟ้าที่จุดวัดไม่ควรเกินค่าใดค่าหนึ่งระหว่าง 0.0125 มม. หรือ 25% ของค่าการเคลื่อนที่ที่วัดได้ การวัดค่าการวิ่งนอกศูนย์ (Runout) กำหนดโดยการหมุนเพลาอย่างช้า ๆ (ที่ความเร็ว 25 ถึง 400 รอบต่อนาที) เมื่อผลกระทบของแรงที่เกิดจากความไม่สมดุลบนโรเตอร์มีน้อยมาก เพื่อให้เป็นไปตามค่าความทนทานที่กำหนด อาจจำเป็นต้องทำการกลึงเพลาเพิ่มเติม หากเป็นไปได้ ควรติดตั้งเซ็นเซอร์แบบไม่สัมผัสโดยตรงกับตัวเรือนแบริ่ง
ค่าขีดจำกัดที่กำหนดใช้ได้เฉพาะกับพัดลมที่ทำงานในโหมดปกติเท่านั้น หากการออกแบบพัดลมอนุญาตให้ทำงานด้วยความเร็วรอบที่เปลี่ยนแปลงได้ ระดับการสั่นสะเทือนที่สูงขึ้นอาจเกิดขึ้นได้ที่ความเร็วอื่น ๆ เนื่องจากอิทธิพลที่ไม่อาจหลีกเลี่ยงได้ของการสั่นสะเทือนที่เกิดจากการสั่นสะเทือนร่วม
หากการออกแบบพัดลมอนุญาตให้เปลี่ยนตำแหน่งใบพัดสัมพันธ์กับการไหลของอากาศที่ทางเข้า ควรใช้ค่าที่กำหนดไว้สำหรับสภาวะที่ใบพัดเปิดเต็มที่ ควรสังเกตว่าการหยุดไหลของอากาศ โดยเฉพาะอย่างยิ่งที่มุมใบพัดใหญ่เมื่อเทียบกับการไหลของอากาศเข้า สามารถนำไปสู่ระดับการสั่นสะเทือนที่เพิ่มขึ้นได้
ระบบรองรับพัดลม
สถานะการสั่นสะเทือนของพัดลมหลังการติดตั้งถูกกำหนดโดยพิจารณาจากความแข็งของการรองรับ การรองรับจะถือว่ามีความแข็งหากความถี่ธรรมชาติครั้งแรกของระบบ "พัดลม – การรองรับ" สูงกว่าความเร็วในการหมุน โดยทั่วไปเมื่อติดตั้งบนฐานคอนกรีตขนาดใหญ่ การรองรับสามารถถือว่ามีความแข็งได้ และเมื่อติดตั้งบนตัวแยกการสั่นสะเทือน – จะถือว่ามีความยืดหยุ่น โครงเหล็กซึ่งมักใช้สำหรับติดตั้งพัดลม อาจเป็นประเภทการรองรับใดประเภทหนึ่งจากสองประเภท หากมีข้อสงสัยเกี่ยวกับประเภทการรองรับของพัดลม สามารถทำการคำนวณหรือทดสอบเพื่อหาความถี่ธรรมชาติครั้งแรกของระบบได้ ในบางกรณี ควรพิจารณาให้การรองรับพัดลมมีความแข็งในทิศทางหนึ่งและมีความยืดหยุ่นในอีกทิศทางหนึ่ง
ขีดจำกัดของการสั่นสะเทือนที่อนุญาตของพัดลมระหว่างการทดสอบในโรงงาน
ระดับการสั่นสะเทือนสูงสุดที่กำหนดไว้ในตารางที่ 4 ใช้กับพัดลมที่ประกอบเสร็จแล้ว ระดับเหล่านี้เกี่ยวข้องกับการวัดความเร็วการสั่นสะเทือนแบบแถบแคบที่จุดรองรับตลับลูกปืน สำหรับความถี่การหมุนที่ใช้ในการทดสอบที่โรงงาน
ตารางที่ 4 – ค่าขีดจำกัดการสั่นสะเทือนระหว่างการทดสอบในโรงงาน
| หมวดพัดลม | ค่าขีดจำกัดความเร็วการสั่นสะเทือน RMS, mm/s | |
| การรองรับที่แข็งแรง | ส่วนรองรับแบบยืดหยุ่น | |
| บีวี-1 | 9.0 | 11.2 |
| บีวี-2 | 3.5 | 5.6 |
| บีวี-3 | 2.8 | 3.5 |
| บีวี-4 | 1.8 | 2.8 |
| บีวี-5 | 1.4 | 1.8 |
| หมายเหตุ
1 กฎสำหรับการแปลงหน่วยความเร็วการสั่นสะเทือนเป็นหน่วยการเคลื่อนที่หรือความเร่งสำหรับการสั่นสะเทือนย่านแคบมีระบุไว้ในภาคผนวก A
2 ค่าในตารางนี้ใช้กับโหลดที่กำหนดและความถี่ในการหมุนที่กำหนดของพัดลมที่ทำงานในโหมดที่มีใบพัดนำทางทางเข้าแบบเปิด ค่าขีดจำกัดสำหรับเงื่อนไขการโหลดอื่นๆ ควรได้รับการตกลงร่วมกันระหว่างผู้ผลิตและลูกค้า แต่ขอแนะนำว่าค่าเหล่านี้ไม่เกินค่าตารางมากกว่า 1.6 เท่า
|
||
ขีดจำกัดของการสั่นสะเทือนของพัดลมที่อนุญาตในระหว่างการทดสอบที่ไซต์งาน
การสั่นสะเทือนของพัดลมใด ๆ ณ สถานที่ใช้งานไม่ได้ขึ้นอยู่เพียงคุณภาพการถ่วงสมดุลเท่านั้น ปัจจัยที่เกี่ยวข้องกับการติดตั้ง เช่น มวลและความแข็งของระบบรองรับ ก็มีผลเช่นกัน ดังนั้น ผู้ผลิตพัดลมจึงไม่รับผิดชอบต่อระดับการสั่นสะเทือนของพัดลม ณ สถานที่ใช้งาน เว้นแต่จะระบุไว้ในสัญญา
ตารางที่ 5 ให้ค่าขีดจำกัดที่แนะนำ (ในหน่วยความเร็วการสั่นสะเทือนสำหรับการสั่นสะเทือนแบบบรอดแบนด์บนตัวเรือนแบริ่ง) สำหรับการทำงานปกติของพัดลมในประเภทต่างๆ
ตารางที่ 5 – ค่าขีดจำกัดการสั่นสะเทือน ณ สถานที่ใช้งาน
| สถานะการสั่นสะเทือนของพัดลม | หมวดพัดลม | ค่าขีดจำกัดความเร็วการสั่นสะเทือน RMS, mm/s | |
| การรองรับที่แข็งแรง | ส่วนรองรับแบบยืดหยุ่น | ||
| การว่าจ้าง | บีวี-1 | 10 | 11.2 |
| บีวี-2 | 5.6 | 9.0 | |
| บีวี-3 | 4.5 | 6.3 | |
| บีวี-4 | 2.8 | 4.5 | |
| บีวี-5 | 1.8 | 2.8 | |
| คำเตือน | บีวี-1 | 10.6 | 14.0 |
| บีวี-2 | 9.0 | 14.0 | |
| บีวี-3 | 7.1 | 11.8 | |
| บีวี-4 | 4.5 | 7.1 | |
| บีวี-5 | 4.0 | 5.6 | |
| ปิดระบบ | บีวี-1 | __1) | __1) |
| บีวี-2 | __1) | __1) | |
| บีวี-3 | 9.0 | 12.5 | |
| บีวี-4 | 7.1 | 11.2 | |
| บีวี-5 | 5.6 | 7.1 | |
| 1) ระดับการปิดเครื่องสำหรับพัดลมประเภท BV-1 และ BV-2 ได้รับการกำหนดขึ้นจากการวิเคราะห์ผลการวัดการสั่นสะเทือนในระยะยาว | |||
การสั่นสะเทือนของพัดลมใหม่ที่กำลังดำเนินการไม่ควรเกินระดับ "การว่าจ้าง" ในขณะที่พัดลมทำงาน ระดับการสั่นสะเทือนของมันคาดว่าจะเพิ่มขึ้นเนื่องจากกระบวนการสึกหรอและผลสะสมของปัจจัยที่มีอิทธิพล การสั่นสะเทือนที่เพิ่มขึ้นดังกล่าวโดยทั่วไปเป็นเรื่องปกติและไม่ควรทำให้เกิดความกังวลจนกว่าจะถึงระดับ "คำเตือน"
เมื่อถึงระดับการสั่นสะเทือน "เตือน" จำเป็นต้องตรวจสอบสาเหตุของการสั่นสะเทือนที่เพิ่มขึ้นและกำหนดมาตรการเพื่อลดการสั่นสะเทือน การทำงานของพัดลมในสถานะนี้ควรอยู่ภายใต้การตรวจสอบอย่างต่อเนื่องและจำกัดเวลาที่จำเป็นในการระบุมาตรการเพื่อกำจัดสาเหตุของการสั่นสะเทือนที่เพิ่มขึ้น
หากระดับการสั่นสะเทือนถึงระดับ "ปิดเครื่อง" จะต้องดำเนินมาตรการเพื่อกำจัดสาเหตุของการสั่นสะเทือนที่เพิ่มขึ้นทันที มิฉะนั้นควรหยุดพัดลม การเลื่อนระดับการสั่นสะเทือนให้อยู่ในระดับที่ยอมรับได้อาจทำให้เกิดความเสียหายต่อแบริ่ง การแตกร้าวในโรเตอร์ และที่จุดเชื่อมของตัวเรือนพัดลม ซึ่งท้ายที่สุดส่งผลให้พัดลมเสียหาย
เมื่อประเมินสถานะการสั่นสะเทือนของพัดลม จำเป็นต้องติดตามการเปลี่ยนแปลงของระดับการสั่นสะเทือนเมื่อเวลาผ่านไป ระดับการสั่นสะเทือนที่เปลี่ยนแปลงกะทันหันบ่งชี้ถึงความจำเป็นในการตรวจสอบพัดลมและมาตรการบำรุงรักษาทันที เมื่อตรวจสอบการเปลี่ยนแปลงของการสั่นสะเทือน ไม่ควรพิจารณากระบวนการเปลี่ยนผ่านที่เกิดจาก เช่น การเปลี่ยนน้ำมันหล่อลื่นหรือขั้นตอนการบำรุงรักษา
อิทธิพลของขั้นตอนการประกอบ
นอกจากล้อแล้ว พัดลมยังมีองค์ประกอบการหมุนอื่นๆ ที่อาจส่งผลต่อระดับการสั่นสะเทือนของพัดลม เช่น รอกขับ สายพาน ข้อต่อ โรเตอร์มอเตอร์ หรืออุปกรณ์ขับเคลื่อนอื่นๆ หากเงื่อนไขการสั่งซื้อจำเป็นต้องมีการจ่ายพัดลมโดยไม่มีอุปกรณ์ขับเคลื่อน ผู้ผลิตอาจทำการทดสอบการประกอบเพื่อกำหนดระดับการสั่นสะเทือน ในกรณีเช่นนี้ แม้ว่าผู้ผลิตจะปรับล้อพัดลมให้สมดุลแล้ว แต่ก็ไม่แน่นอนว่าพัดลมจะทำงานได้อย่างราบรื่นจนกว่าเพลาพัดลมจะเชื่อมต่อกับชุดขับเคลื่อน และเครื่องทั้งหมดได้รับการทดสอบการสั่นสะเทือนระหว่างการทดสอบเดินเครื่อง
โดยปกติหลังจากการประกอบแล้ว จำเป็นต้องมีการปรับสมดุลเพิ่มเติมเพื่อลดระดับการสั่นสะเทือนให้อยู่ในระดับที่ยอมรับได้ สำหรับพัดลมใหม่ทุกประเภท BV-3, BV-4 และ BV-5 ขอแนะนำให้วัดการสั่นสะเทือนสำหรับเครื่องจักรที่ประกอบแล้วก่อนการทดสอบเดินเครื่อง สิ่งนี้จะสร้างพื้นฐานและร่างมาตรการบำรุงรักษาเพิ่มเติม
ผู้ผลิตพัดลมจะไม่รับผิดชอบต่อผลกระทบต่อการสั่นสะเทือนของชิ้นส่วนขับเคลื่อนที่ติดตั้งหลังการทดสอบจากโรงงาน
เครื่องมือวัดการสั่นสะเทือนและการสอบเทียบ
เครื่องมือวัด
เครื่องมือวัดและเครื่องปรับสมดุลที่ใช้ต้องได้รับการตรวจสอบและตรงตามข้อกำหนดของงาน ช่วงเวลาระหว่างการตรวจสอบจะกำหนดโดยคำแนะนำของผู้ผลิตสำหรับเครื่องมือวัด (ทดสอบ) สภาพของเครื่องมือวัดต้องรับประกันการทำงานตามปกติตลอดระยะเวลาการทดสอบ
บุคลากรที่ทำงานกับเครื่องมือวัดจะต้องมีทักษะและประสบการณ์เพียงพอในการตรวจจับความผิดปกติที่อาจเกิดขึ้นและการเสื่อมสภาพของคุณภาพของเครื่องมือวัด
การสอบเทียบ
เครื่องมือวัดทั้งหมดจะต้องได้รับการสอบเทียบตามมาตรฐาน ความซับซ้อนของขั้นตอนการสอบเทียบอาจแตกต่างกันตั้งแต่การตรวจสอบทางกายภาพอย่างง่ายไปจนถึงการสอบเทียบทั้งระบบ มวลแก้ไขที่ใช้ระบุความไม่สมดุลตกค้างตามมาตรฐาน ISO 1940-1 ยังสามารถใช้เพื่อสอบเทียบเครื่องมือวัดได้ด้วย
เอกสารประกอบ
การถ่วงสมดุล
เมื่อมีการร้องขอ และหากระบุไว้ในเงื่อนไขสัญญา สามารถจัดทำรายงานการทดสอบการถ่วงสมดุลพัดลมให้ลูกค้าได้ โดยแนะนำให้รวมข้อมูลต่อไปนี้:
– ชื่อผู้ผลิตเครื่องสมดุล หมายเลขรุ่น
– ประเภทของการติดตั้งโรเตอร์: ระหว่างส่วนรองรับหรือคานยื่นออก
– วิธีการปรับสมดุล: คงที่หรือไดนามิก
– มวลของชิ้นส่วนที่หมุนของชุดโรเตอร์
– ความไม่สมดุลคงเหลือในแต่ละ ระนาบแก้ไข (ใช้ของเรา เครื่องคำนวณความไม่สมดุลคงเหลือ (ISO 21940-11) เพื่อกำหนดค่าที่อนุญาต);
– ค่าความไม่สมดุลตกค้างที่ยอมให้ได้ในแต่ละระนาบแก้ไข;
– ชั้นความแม่นยำของการถ่วงสมดุล;
– เกณฑ์การยอมรับ: ยอมรับ/ปฏิเสธ;
– ใบรับรองการถ่วงสมดุล (ถ้าจำเป็น).
– ชื่อผู้ผลิตเครื่องสมดุล หมายเลขรุ่น
– ประเภทของการติดตั้งโรเตอร์: ระหว่างส่วนรองรับหรือคานยื่นออก
– วิธีการปรับสมดุล: คงที่หรือไดนามิก
– มวลของชิ้นส่วนที่หมุนของชุดโรเตอร์
– ความไม่สมดุลคงเหลือในแต่ละ ระนาบแก้ไข (ใช้ของเรา เครื่องคำนวณความไม่สมดุลคงเหลือ (ISO 21940-11) เพื่อกำหนดค่าที่อนุญาต);
– ค่าความไม่สมดุลตกค้างที่ยอมให้ได้ในแต่ละระนาบแก้ไข;
– ชั้นความแม่นยำของการถ่วงสมดุล;
– เกณฑ์การยอมรับ: ยอมรับ/ปฏิเสธ;
– ใบรับรองการถ่วงสมดุล (ถ้าจำเป็น).
การสั่นสะเทือน
เมื่อมีการร้องขอ หากระบุไว้ในเงื่อนไขสัญญา สามารถจัดทำรายงานการทดสอบการสั่นสะเทือนของพัดลมให้กับลูกค้าได้ ซึ่งแนะนำให้รวมข้อมูลต่อไปนี้:
– เครื่องมือวัดที่ใช้
– วิธีการติดตั้งเซ็นเซอร์การสั่นสะเทือน;
– พารามิเตอร์การทำงานของพัดลม (การไหลของอากาศ ความดัน กำลัง)
– ความถี่ในการหมุนของพัดลม
– ประเภทการรองรับ: แบบแข็งหรือแบบยืดหยุ่น;
– การสั่นสะเทือนที่วัดได้:
1) ตำแหน่งเซ็นเซอร์สั่นสะเทือนและแกนการวัด
2) หน่วยการวัดและระดับอ้างอิงการสั่นสะเทือน
3) ช่วงความถี่การวัด (แถบความถี่แคบหรือกว้าง);
– ระดับการสั่นสะเทือนที่อนุญาต
– ระดับการสั่นสะเทือนที่วัดได้
– เกณฑ์การยอมรับ: ยอมรับ/ปฏิเสธ;
– ใบรับรองระดับการสั่นสะเทือน (หากจำเป็น)
– เครื่องมือวัดที่ใช้
– วิธีการติดตั้งเซ็นเซอร์การสั่นสะเทือน;
– พารามิเตอร์การทำงานของพัดลม (การไหลของอากาศ ความดัน กำลัง)
– ความถี่ในการหมุนของพัดลม
– ประเภทการรองรับ: แบบแข็งหรือแบบยืดหยุ่น;
– การสั่นสะเทือนที่วัดได้:
1) ตำแหน่งเซ็นเซอร์สั่นสะเทือนและแกนการวัด
2) หน่วยการวัดและระดับอ้างอิงการสั่นสะเทือน
3) ช่วงความถี่การวัด (แถบความถี่แคบหรือกว้าง);
– ระดับการสั่นสะเทือนที่อนุญาต
– ระดับการสั่นสะเทือนที่วัดได้
– เกณฑ์การยอมรับ: ยอมรับ/ปฏิเสธ;
– ใบรับรองระดับการสั่นสะเทือน (หากจำเป็น)
วิธีการถ่วงสมดุลพัดลมบนเครื่องถ่วงสมดุล
ข.1. พัดลมขับตรง
ข.1.1. บทบัญญัติทั่วไป
ใบพัดซึ่งติดตั้งโดยตรงบนเพลาของมอเตอร์ในระหว่างการประกอบ ควรได้รับการปรับสมดุลตามกฎเดียวกันเพื่อคำนึงถึงผลกระทบของร่องสลักเช่นเดียวกับเพลาของมอเตอร์
มอเตอร์ที่ผลิตในปีก่อนๆ อาจถูกถ่วงสมดุลโดยใช้ร่องลิ่มเต็ม ปัจจุบันเพลามอเตอร์ถูกถ่วงสมดุลโดยใช้ร่องลิ่มครึ่งเดียว ตามที่ ISO 8821 กำหนด (รับรองเป็น GOST 31322) และทำเครื่องหมายด้วยตัวอักษร H (ดู ISO 8821)
B.1.2. มอเตอร์ที่ถ่วงสมดุลด้วยร่องสลักเต็ม
ใบพัดลมที่ติดตั้งบนเพลาของมอเตอร์ซึ่งมีการปรับสมดุลด้วยร่องเพลาเต็ม ควรปรับสมดุลโดยไม่มีคีย์บนแกนเพลาเรียว
B.1.3. มอเตอร์ที่ปรับสมดุลด้วยร่องครึ่งหนึ่ง
สำหรับล้อพัดลมที่ติดตั้งบนเพลาของมอเตอร์ซึ่งมีการปรับสมดุลด้วยร่องครึ่งหนึ่ง ตัวเลือกต่อไปนี้เป็นไปได้:
ก) หากล้อมีดุมเหล็ก ให้ตัดร่องสลักในดุมหลังจากถ่วงล้อเสร็จแล้ว
ข) ถ่วงสมดุลบนอาร์เบอร์เรียวโดยใส่ลิ่มครึ่งดอกลงในร่องสลัก;
c) ถ่วงสมดุลบนอาร์เบอร์ที่มีร่องสลักหนึ่งร่องหรือมากกว่า (ดู B.3) โดยใช้ลิ่มเต็มดอก
ก) หากล้อมีดุมเหล็ก ให้ตัดร่องสลักในดุมหลังจากถ่วงล้อเสร็จแล้ว
ข) ถ่วงสมดุลบนอาร์เบอร์เรียวโดยใส่ลิ่มครึ่งดอกลงในร่องสลัก;
c) ถ่วงสมดุลบนอาร์เบอร์ที่มีร่องสลักหนึ่งร่องหรือมากกว่า (ดู B.3) โดยใช้ลิ่มเต็มดอก
B.2. พัดลมที่ขับเคลื่อนโดยเพลาอื่น
หากเป็นไปได้ ควรปรับสมดุลของชิ้นส่วนที่หมุนทั้งหมด รวมถึงเพลาพัดลมและรอก เป็นหน่วยเดียว หากไม่สามารถทำได้ ควรปรับสมดุลบนแกน (ดู B.3) โดยใช้กฎการคำนวณร่องเดียวกันกับที่ใช้กับเพลา
B.3. อาร์เบอร์
โครงที่ติดตั้งล้อพัดลมระหว่างการปรับสมดุลต้องเป็นไปตามข้อกำหนดดังต่อไปนี้:
ก) มีน้ำหนักเบาที่สุดเท่าที่จะเป็นไปได้;
b) อยู่ในสภาพสมดุล ซึ่งได้รับการรับรองโดยการบำรุงรักษาที่เหมาะสมและการตรวจสอบเป็นประจำ
c) ควรมีลักษณะเรียวเพื่อลดข้อผิดพลาดที่เกี่ยวข้องกับความไม่สมมาตร ซึ่งเกิดจากค่าความคลาดเคลื่อนของขนาดรูของฮับและขนาดของแกน หากแกนมีลักษณะเรียว ตำแหน่งที่แท้จริงของระนาบการแก้ไขเมื่อเทียบกับตลับลูกปืนควรได้รับการพิจารณาในการคำนวณความไม่สมดุล
ก) มีน้ำหนักเบาที่สุดเท่าที่จะเป็นไปได้;
b) อยู่ในสภาพสมดุล ซึ่งได้รับการรับรองโดยการบำรุงรักษาที่เหมาะสมและการตรวจสอบเป็นประจำ
c) ควรมีลักษณะเรียวเพื่อลดข้อผิดพลาดที่เกี่ยวข้องกับความไม่สมมาตร ซึ่งเกิดจากค่าความคลาดเคลื่อนของขนาดรูของฮับและขนาดของแกน หากแกนมีลักษณะเรียว ตำแหน่งที่แท้จริงของระนาบการแก้ไขเมื่อเทียบกับตลับลูกปืนควรได้รับการพิจารณาในการคำนวณความไม่สมดุล
หากจำเป็นต้องใช้อาร์เบอร์ทรงกระบอก ควรทำร่องสลักไว้ในอาร์เบอร์นั้น และใส่ลิ่มเต็มดอกลงในร่องเพื่อส่งแรงบิดจากอาร์เบอร์ไปยังใบพัดลม
อีกทางเลือกหนึ่งคือการตัดร่องคีย์สองร่องที่ปลายด้านตรงข้ามของเส้นผ่านศูนย์กลางเพลา ซึ่งจะช่วยให้สามารถใช้การปรับสมดุลแบบย้อนกลับได้ วิธีการนี้ประกอบด้วยขั้นตอนดังต่อไปนี้ ขั้นแรก ให้วัดความไม่สมดุลของล้อโดยใส่คีย์เต็มเข้าไปในร่องคีย์หนึ่ง และใส่คีย์ครึ่งเข้าไปในอีกร่องหนึ่ง จากนั้นหมุนล้อ 180° เมื่อเทียบกับแกนเพลา แล้ววัดความไม่สมดุลอีกครั้ง ความแตกต่างระหว่างค่าความไม่สมดุลทั้งสองเกิดจากค่าความไม่สมดุลที่เหลืออยู่ของแกนและข้อต่อขับเคลื่อนสากล เพื่อให้ได้ค่าความไม่สมดุลของโรเตอร์ที่แท้จริง ให้ใช้ครึ่งหนึ่งของค่าความแตกต่างระหว่างค่าการวัดทั้งสองนี้
แหล่งที่มาของการสั่นสะเทือนของพัดลม
มีแหล่งกำเนิดการสั่นสะเทือนหลายประการภายในพัดลม และการสั่นสะเทือนที่ความถี่บางช่วงสามารถเชื่อมโยงโดยตรงกับลักษณะการออกแบบเฉพาะของเครื่องจักรได้ ภาคผนวกนี้ครอบคลุมเฉพาะแหล่งกำเนิดการสั่นสะเทือนที่พบบ่อยที่สุดซึ่งพบในพัดลมประเภทต่างๆ ส่วนใหญ่ กฎทั่วไปคือความหลวมใดๆ ในระบบรองรับจะทำให้สภาพการสั่นสะเทือนของพัดลมเสื่อมลง
ความไม่สมดุลของพัดลม
นี่คือแหล่งกำเนิดหลักของการสั่นสะเทือนของพัดลม ซึ่งมีลักษณะเด่นคือการมีองค์ประกอบของการสั่นสะเทือนที่ความถี่การหมุน (ฮาร์มอนิกลำดับที่หนึ่ง ฮาร์โมนิก). สาเหตุของความไม่สมดุลคือแกนของมวลที่หมุนอยู่นั้นเอียงหรือมีลักษณะไม่สมมาตรกับแกนหมุน ซึ่งอาจเกิดจากการกระจายตัวของมวลที่ไม่สม่ำเสมอ ผลรวมของค่าความคลาดเคลื่อนในขนาดของรูของฮับและแกน การโค้งงอของแกน หรือการรวมกันของปัจจัยเหล่านี้ การสั่นสะเทือนที่เกิดจากความไม่สมดุลจะกระทำในทิศทางรัศมีเป็นหลัก.
การโค้งงอของเพลาชั่วคราวอาจเกิดจากการให้ความร้อนทางกลที่ไม่สม่ำเสมอ – เนื่องจากแรงเสียดทานระหว่างชิ้นส่วนที่หมุนกับชิ้นส่วนที่อยู่กับที่ – หรือจากธรรมชาติทางไฟฟ้า การโค้งงอถาวรอาจเกิดจากการเปลี่ยนแปลงในคุณสมบัติของวัสดุหรือการไม่ตรงแนวของเพลาและใบพัดเมื่อติดตั้งพัดลมและมอเตอร์แยกกัน
ในระหว่างการทำงาน ความไม่สมดุลของใบพัดอาจเพิ่มขึ้นได้เนื่องจากการสะสมของอนุภาคจากอากาศ เมื่อทำงานในสภาพแวดล้อมที่มีความรุนแรง ความไม่สมดุลอาจเกิดจากการกัดกร่อนหรือการกัดกร่อนที่ไม่สม่ำเสมอของใบพัด
ความไม่สมดุลสามารถแก้ไขได้โดยการปรับสมดุลเพิ่มเติมในระนาบที่เหมาะสม แต่ก่อนที่จะดำเนินการปรับสมดุล ควรระบุแหล่งที่มาของความไม่สมดุล กำจัดออกไป และตรวจสอบความเสถียรภาพการสั่นสะเทือนของเครื่องจักรก่อน
การไม่ตรงแนวของพัดลมและมอเตอร์
ข้อบกพร่องนี้อาจเกิดขึ้นเมื่อเพลาของมอเตอร์และพัดลมเชื่อมต่อกันผ่านสายพานหรือข้อต่อยืดหยุ่น การไม่ตรงแนวอาจตรวจพบได้บางครั้งจากองค์ประกอบความถี่การสั่นสะเทือนที่มีลักษณะเฉพาะ ซึ่งมักจะเป็นฮาร์มอนิกส์ลำดับที่หนึ่งและสองของความถี่การหมุน ในกรณีของการไม่ตรงแนวแบบขนานของเพลา การสั่นสะเทือนจะเกิดขึ้นในทิศทางรัศมีเป็นหลัก ในขณะที่หากเพลาตัดกันในมุมหนึ่ง การสั่นสะเทือนตามแนวยาวอาจกลายเป็นหลัก
หากเพลาเชื่อมต่อกันในมุมเอียงและใช้ข้อต่อแบบแข็ง แรงสลับจะเริ่มทำงานในเครื่องจักร ทำให้เกิดการสึกหรอของเพลาและข้อต่อเพิ่มขึ้น ผลกระทบนี้สามารถลดลงได้อย่างมากโดยการใช้ข้อต่อแบบยืดหยุ่น
การสั่นสะเทือนของพัดลมเนื่องจากการกระตุ้นทางอากาศพลศาสตร์
การกระตุ้นการสั่นสะเทือนสามารถเกิดขึ้นได้จากการปฏิสัมพันธ์ระหว่างใบพัดของพัดลมกับองค์ประกอบที่อยู่กับที่ของการออกแบบ เช่น แผ่นนำลม มอเตอร์ หรือฐานรองรับตลับลูกปืน ค่าช่องว่างที่ไม่ถูกต้อง หรือโครงสร้างช่องรับและช่องระบายอากาศที่ออกแบบไม่เหมาะสม ลักษณะเด่นของแหล่งกำเนิดเหล่านี้คือการเกิดการสั่นสะเทือนเป็นระยะๆ ที่สัมพันธ์กับความถี่การหมุนของใบพัด ควบคู่ไปกับการเปลี่ยนแปลงแบบสุ่มของการปฏิสัมพันธ์ระหว่างใบพัดกับอากาศ การสั่นสะเทือนสามารถสังเกตได้ที่ ฮาร์มอนิกของความถี่ใบพัด, ซึ่งเป็นผลคูณของความถี่การหมุนของล้อและจำนวนใบมีดของล้อ.
ความไม่เสถียรทางอากาศพลศาสตร์ของการไหลของอากาศ ซึ่งเกิดจากการหยุดชะงักของอากาศที่ผิวใบพัดและการเกิดกระแสวนตามมา ทำให้เกิดการสั่นสะเทือนแบบกว้าง โดยลักษณะของสเปกตรัมการสั่นสะเทือนจะเปลี่ยนแปลงไปตามภาระของพัดลม
เสียงรบกวนทางอากาศพลศาสตร์มีลักษณะเฉพาะคือไม่เกี่ยวข้องกับความถี่การหมุนของล้อ และสามารถเกิดขึ้นที่ความถี่ย่อยของความถี่การหมุน (คือ ที่ความถี่ต่ำกว่าความถี่การหมุน) ในกรณีนี้ สามารถสังเกตเห็นการสั่นสะเทือนอย่างมีนัยสำคัญของตัวเรือนพัดลมและท่อได้
หากระบบอากาศพลศาสตร์ของพัดลมไม่สอดคล้องกับลักษณะของมันอย่างเหมาะสม อาจเกิดการกระแทกอย่างรุนแรงขึ้นในระบบได้ การกระแทกเหล่านี้สามารถแยกแยะได้โดยง่ายผ่านเสียง และถูกส่งผ่านเป็นแรงกระตุ้นไปยังระบบรองรับของพัดลม
หากสาเหตุที่กล่าวมาข้างต้นทำให้เกิดการสั่นสะเทือนของใบพัด ลักษณะการสั่นสะเทือนสามารถตรวจสอบได้โดยการติดตั้งเซ็นเซอร์ในส่วนต่าง ๆ ของโครงสร้าง
การสั่นสะเทือนของพัดลมเนื่องจากการหมุนวนในชั้นน้ำมัน
การเกิดการหมุนวนในชั้นน้ำมันหล่อลื่นของตลับลูกปืนแบบเลื่อนอาจสังเกตได้ที่ความถี่ลักษณะเฉพาะซึ่งต่ำกว่าความถี่การหมุนของโรเตอร์เล็กน้อย เว้นแต่พัดลมจะทำงานที่ความเร็วเกินกว่าความเร็ววิกฤตแรก ในกรณีหลังนี้ จะสังเกตเห็นความไม่เสถียรของลิ่มน้ำมันที่ความเร็ววิกฤตแรก และบางครั้งผลกระทบนี้เรียกว่าการหมุนวนแบบเรโซแนนท์
แหล่งกำเนิดการสั่นสะเทือนของพัดลมจากสาเหตุทางไฟฟ้า
การให้ความร้อนที่ไม่สม่ำเสมอของโรเตอร์มอเตอร์อาจทำให้มันโค้งงอ ส่งผลให้เกิดความไม่สมดุล (แสดงออกที่ฮาร์มอนิกแรก)
ในกรณีของมอเตอร์แบบอะซิงโครนัส การมีอยู่ของส่วนประกอบที่ความถี่เท่ากับความถี่การหมุนคูณด้วยจำนวนแผ่นโรเตอร์บ่งชี้ถึงข้อบกพร่องที่เกี่ยวข้องกับแผ่นสเตเตอร์ และในทางกลับกัน ส่วนประกอบที่ความถี่เท่ากับความถี่การหมุนคูณด้วยจำนวนแผ่นโรเตอร์บ่งชี้ถึงข้อบกพร่องที่เกี่ยวข้องกับแผ่นโรเตอร์
ส่วนประกอบการสั่นสะเทือนหลายชนิดที่มีลักษณะทางไฟฟ้าจะหายไปทันทีเมื่อปิดแหล่งจ่ายไฟ
การสั่นสะเทือนของพัดลมเนื่องจากการกระตุ้นของสายพาน
โดยทั่วไปแล้ว ปัญหาที่เกี่ยวข้องกับระบบขับเคลื่อนด้วยสายพานมีอยู่สองประเภท คือ เมื่อการทำงานของระบบขับเคลื่อนได้รับผลกระทบจากข้อบกพร่องภายนอก และเมื่อข้อบกพร่องนั้นอยู่ในสายพานเอง
ในกรณีแรก แม้ว่าสายพานจะสั่นสะเทือน แต่สาเหตุเกิดจากการกระทำของแรงจากแหล่งอื่น ดังนั้นการเปลี่ยนสายพานจะไม่ให้ผลลัพธ์ตามที่ต้องการ แหล่งกำเนิดแรงดังกล่าวที่พบบ่อย ได้แก่ ความไม่สมดุลในระบบขับเคลื่อน ความเยื้องศูนย์ของพูลเลย์ การติดตั้งที่ไม่ตรงแนว และการเชื่อมต่อทางกลที่หลวม ดังนั้น ก่อนเปลี่ยนสายพาน ควรทำการวิเคราะห์การสั่นสะเทือนเพื่อระบุแหล่งกำเนิดแรงกระตุ้น
หากสายพานตอบสนองต่อแรงบังคับภายนอก ความถี่การสั่นของสายพานจะมีแนวโน้มที่จะเท่ากับความถี่ของการกระตุ้น ในกรณีนี้ ความถี่ของการกระตุ้นสามารถกำหนดได้โดยใช้โคมไฟสโตรโบสโคปิก โดยปรับความถี่ให้สายพานดูเหมือนอยู่กับที่ในแสงของโคมไฟ
ในกรณีของระบบขับเคลื่อนหลายสายพาน ความตึงของสายพานที่ไม่เท่ากันอาจนำไปสู่การเพิ่มขึ้นอย่างมีนัยสำคัญของแรงสั่นสะเทือนที่ถูกส่งผ่าน
กรณีที่แหล่งกำเนิดการสั่นสะเทือนคือสายพานเองนั้นเกี่ยวข้องกับข้อบกพร่องทางกายภาพของสายพาน เช่น รอยแตก จุดแข็งและจุดอ่อน จุดสกปรกบนพื้นผิวของสายพาน วัสดุที่หายไปจากพื้นผิวของสายพาน เป็นต้น สำหรับสายพานวี การเปลี่ยนแปลงความกว้างของสายพานจะทำให้สายพานเคลื่อนขึ้นและลงตามรางของพูลเลย์ ซึ่งก่อให้เกิดการสั่นสะเทือนเนื่องจากการเปลี่ยนแปลงความตึงของสายพาน
หากแหล่งกำเนิดการสั่นสะเทือนคือสายพานเอง ความถี่ของการสั่นสะเทือนมักจะเป็นฮาร์มอนิกของความถี่การหมุนของสายพาน ในกรณีเฉพาะ ความถี่กระตุ้นจะขึ้นอยู่กับลักษณะของข้อบกพร่องและจำนวนของลูกรอก รวมถึงตัวปรับความตึง
ในบางกรณี แอมพลิจูดของการสั่นสะเทือนอาจไม่เสถียร เรื่องนี้พบได้บ่อยเป็นพิเศษในระบบขับเคลื่อนหลายสายพาน
ข้อบกพร่องทางกลและไฟฟ้าเป็นแหล่งกำเนิดการสั่นสะเทือน ซึ่งจะเปลี่ยนเป็นเสียงรบกวนในอากาศในภายหลัง เสียงรบกวนทางกลสามารถเกี่ยวข้องกับความไม่สมดุลของพัดลมหรือมอเตอร์ เสียงจากตลับลูกปืน การจัดแนวแกน การสั่นสะเทือนของผนังท่อและแผงตัวเครื่อง การสั่นสะเทือนของใบพัดตัวหน่วง การสั่นสะเทือนของใบพัด ตัวหน่วง ท่อ และโครงสร้างรองรับ รวมถึงการถ่ายทอดการสั่นสะเทือนทางกลผ่านโครงสร้าง เสียงรบกวนทางไฟฟ้าเกี่ยวข้องกับการแปลงพลังงานไฟฟ้าในรูปแบบต่าง ๆ ดังนี้: 1) แรงแม่เหล็กถูกกำหนดโดยความหนาแน่นของฟลักซ์แม่เหล็ก จำนวนและรูปร่างของขั้วแม่เหล็ก และรูปทรงเรขาคณิตของช่องว่างอากาศ; 2) เสียงรบกวนทางไฟฟ้าแบบสุ่มถูกกำหนดโดยแปรงถ่าน การเกิดอาร์กไฟฟ้า ประกายไฟไฟฟ้า ฯลฯ
เสียงแอโรไดนามิกสามารถเกี่ยวข้องกับการเกิดวอร์เท็กซ์ การสั่นของแรงดัน ความต้านทานอากาศ ฯลฯ และอาจมีลักษณะเป็นแถบกว้างและแถบแคบ สัญญาณรบกวนในบรอดแบนด์อาจเกิดจาก: a) ใบพัด, ตัวหน่วง, และสิ่งกีดขวางอื่น ๆ ในเส้นทางของกระแสอากาศ; b) การหมุนของพัดลมโดยรวม, สายพาน, ช่องว่าง, ฯลฯ; c) การเปลี่ยนแปลงทิศทางของกระแสอากาศหรือขนาดหน้าตัดของท่ออย่างกะทันหัน, ความแตกต่างของความเร็วของกระแสอากาศ, การแยกตัวของกระแสอากาศเนื่องจากผลกระทบจากขอบเขต, ผลกระทบจากการบีบอัดของกระแสอากาศ, ฯลฯ เสียงรบกวนแบบแบนด์แคบสามารถเกิดจาก: a) การสั่นสะเทือนแบบเรโซแนนซ์ (เช่น ผลกระทบจากท่อออร์แกน การสั่นสะเทือนของสาย การสั่นสะเทือนของแผงหรือองค์ประกอบโครงสร้าง ฯลฯ); b) การเกิดวอร์เท็กซ์บริเวณขอบคม (การกระตุ้นคอลัมน์อากาศ); c) การหมุน (เช่น ผลกระทบจากเสียงไซเรน ช่องแคบ รู ช่องบนชิ้นส่วนที่หมุน)
การกระแทกที่เกิดจากการสัมผัสกันระหว่างองค์ประกอบทางกลต่างๆ ของโครงสร้างจะทำให้เกิดเสียงที่คล้ายคลึงกับการกระแทกด้วยค้อน การม้วนฟ้าร้อง กล่องเปล่าที่สะท้อนกลับ ฯลฯ เสียงการกระแทกสามารถได้ยินได้จากการกระแทกของฟันเฟืองและการตบมือของสายพานที่ชำรุด แรงกระตุ้นการกระแทกอาจเกิดขึ้นเพียงชั่วครู่จนต้องแยกแยะแรงกระตุ้นการกระแทกเป็นระยะจากกระบวนการชั่วคราว จำเป็นต้องมีอุปกรณ์บันทึกความเร็วสูงพิเศษ บริเวณที่เกิดแรงกระตุ้นการกระแทกจำนวนมาก การซ้อนทับจุดสูงสุดจะสร้างเอฟเฟกต์ฮัมอย่างต่อเนื่อง
การพึ่งพาการสั่นสะเทือนกับประเภทการรองรับพัดลม
ทางเลือกที่ถูกต้องของตัวรองรับพัดลมหรือการออกแบบฐานรากเป็นสิ่งจำเป็นสำหรับการทำงานที่ราบรื่นและปราศจากปัญหา เพื่อให้แน่ใจว่าส่วนประกอบที่หมุนได้อยู่ในแนวเดียวกันเมื่อติดตั้งพัดลม มอเตอร์ และอุปกรณ์ขับเคลื่อนอื่นๆ จึงมีการใช้โครงเหล็กหรือฐานคอนกรีตเสริมเหล็ก บางครั้งความพยายามที่จะประหยัดโครงสร้างรองรับทำให้ไม่สามารถรักษาการจัดตำแหน่งส่วนประกอบของเครื่องจักรที่ต้องการได้ สิ่งนี้เป็นสิ่งที่ยอมรับไม่ได้โดยเฉพาะอย่างยิ่งเมื่อการสั่นสะเทือนไวต่อการเปลี่ยนแปลงการจัดตำแหน่ง โดยเฉพาะอย่างยิ่งสำหรับเครื่องจักรที่ประกอบด้วยชิ้นส่วนแยกกันที่เชื่อมต่อกันด้วยตัวยึดโลหะ
รากฐานที่ใช้วางฐานอาจส่งผลต่อการสั่นสะเทือนของพัดลมและมอเตอร์ด้วย หากความถี่ธรรมชาติของฐานรากอยู่ใกล้กับพัดลมหรือความถี่ในการหมุนของมอเตอร์ ฐานรากจะดังก้องระหว่างการทำงานของพัดลม ซึ่งสามารถตรวจจับได้โดยการวัดแรงสั่นสะเทือนหลายจุดทั่วฐานราก พื้นโดยรอบ และส่วนรองรับพัดลม บ่อยครั้งในสภาวะเรโซแนนซ์ องค์ประกอบการสั่นสะเทือนในแนวตั้งจะสูงกว่าแนวนอนอย่างมาก การสั่นสะเทือนสามารถลดได้โดยการทำให้ฐานรากแข็งขึ้นหรือเพิ่มมวล แม้ว่าความไม่สมดุลและการวางแนวที่ไม่ถูกต้องจะหมดไป ซึ่งช่วยลดแรงบังคับได้ สภาพเบื้องต้นของการสั่นสะเทือนที่สำคัญก็อาจยังคงอยู่ ซึ่งหมายความว่าหากพัดลมพร้อมส่วนรองรับอยู่ใกล้เสียงสะท้อน การบรรลุค่าการสั่นสะเทือนที่ยอมรับได้จะต้องมีความสมดุลที่แม่นยำยิ่งขึ้นและการวางแนวเพลาที่แม่นยำมากกว่าที่จำเป็นสำหรับเครื่องจักรดังกล่าวโดยทั่วไป สถานการณ์เช่นนี้ไม่เป็นที่พึงปรารถนา และควรหลีกเลี่ยงโดยการเพิ่มการรองรับหรือมวลและ/หรือความแข็งของบล็อกคอนกรีต
คู่มือการตรวจสอบและวินิจฉัยสภาพการสั่นสะเทือน
หลักการสำคัญของการตรวจสอบสภาพการสั่นสะเทือนของเครื่องจักร (ต่อไปนี้จะเรียกว่าเงื่อนไข) คือการสังเกตผลลัพธ์ของการวัดที่วางแผนไว้อย่างเหมาะสม เพื่อระบุแนวโน้มของระดับการสั่นสะเทือนที่เพิ่มขึ้น และพิจารณาจากมุมมองของปัญหาที่อาจเกิดขึ้น การติดตามผลสามารถใช้ได้ในสถานการณ์ที่ความเสียหายเกิดขึ้นอย่างช้าๆ และการเสื่อมสภาพของกลไกจะแสดงออกผ่านสัญญาณทางกายภาพที่วัดได้
การสั่นสะเทือนของพัดลมซึ่งเป็นผลมาจากการพัฒนาของข้อบกพร่องทางกายภาพนั้นสามารถตรวจสอบได้ในช่วงเวลาหนึ่ง และเมื่อตรวจพบระดับการสั่นสะเทือนที่เพิ่มขึ้น ความถี่ในการสังเกตก็จะเพิ่มขึ้น และสามารถทำการวิเคราะห์สภาพโดยละเอียดได้ ในกรณีนี้ สาเหตุของการเปลี่ยนแปลงการสั่นสะเทือนสามารถระบุได้จากการวิเคราะห์ความถี่การสั่นสะเทือน ซึ่งช่วยให้สามารถกำหนดมาตรการที่จำเป็นและวางแผนการดำเนินการได้นานก่อนที่ความเสียหายจะรุนแรง โดยปกติแล้ว มาตรการต่างๆ จะถือว่าจำเป็นเมื่อระดับการสั่นสะเทือนเพิ่มขึ้น 1.6 เท่าหรือ 4 เดซิเบล เมื่อเทียบกับระดับพื้นฐาน
โปรแกรมการตรวจติดตามสภาวะประกอบด้วยหลายขั้นตอน ซึ่งสามารถสรุปสั้นๆ ได้ดังนี้:
- ก) ระบุสภาพของพัดลมและกำหนดระดับการสั่นสะเทือนพื้นฐาน (อาจแตกต่างจากระดับที่ได้รับระหว่างการทดสอบในโรงงานเนื่องจากวิธีการติดตั้งที่แตกต่างกัน เป็นต้น)
- b) เลือกจุดวัดการสั่นสะเทือน
- c) กำหนดความถี่ในการสังเกต (การวัด)
- d) จัดทำขั้นตอนการลงทะเบียนข้อมูล
- e) กำหนดเกณฑ์ในการประเมินสถานะการสั่นสะเทือนของพัดลม ค่าจำกัดสำหรับการสั่นสะเทือนสัมบูรณ์และการเปลี่ยนแปลงการสั่นสะเทือน สรุปประสบการณ์ในการใช้งานเครื่องจักรที่คล้ายกัน
เนื่องจากโดยทั่วไปแล้วพัดลมจะทำงานโดยไม่มีปัญหาใดๆ ที่ความเร็วที่ไม่เข้าใกล้จุดวิกฤต ระดับการสั่นสะเทือนไม่ควรเปลี่ยนแปลงอย่างมีนัยสำคัญด้วยความเร็วเล็กน้อยหรือการเปลี่ยนแปลงโหลด แต่สิ่งสำคัญคือต้องทราบว่าเมื่อพัดลมทำงานด้วยความเร็วการหมุนที่แปรผัน ค่าจำกัดการสั่นสะเทือนที่กำหนดไว้จะถูกนำไปใช้ จนถึงความเร็วรอบการทำงานสูงสุด หากไม่สามารถบรรลุความเร็วการหมุนสูงสุดภายในขีดจำกัดการสั่นสะเทือนที่กำหนดไว้ อาจบ่งชี้ว่ามีปัญหาร้ายแรงและต้องมีการตรวจสอบเป็นพิเศษ
คำแนะนำในการวินิจฉัยบางประการในภาคผนวก C ขึ้นอยู่กับประสบการณ์การทำงานของพัดลม และมีไว้สำหรับการใช้งานตามลำดับเมื่อวิเคราะห์สาเหตุของการสั่นสะเทือนที่เพิ่มขึ้น
เพื่อประเมินการสั่นสะเทือนของพัดลมเฉพาะในเชิงคุณภาพและกำหนดแนวทางสำหรับการดำเนินการต่อไป คุณสามารถใช้ขอบเขตโซนสภาพการสั่นสะเทือนที่กำหนดโดย ISO 10816-1 ได้
คาดว่าสำหรับพัดลมใหม่ ระดับการสั่นสะเทือนจะต่ำกว่าค่าขีดจำกัดที่กำหนดในตารางที่ 3 ค่าเหล่านี้สอดคล้องกับขอบเขตของโซน A ของสภาวะการสั่นสะเทือนตามมาตรฐาน ISO 10816-1 ค่าที่แนะนำสำหรับระดับการเตือนและการปิดเครื่องจะกำหนดขึ้นจากการวิเคราะห์ข้อมูลที่รวบรวมเกี่ยวกับพัดลมบางประเภท
ข้อมูลการปฏิบัติตามข้อกำหนด
มาตรฐานสากลอ้างอิงที่ใช้เป็นมาตรฐานอ้างอิงในมาตรฐานนี้
ตาราง H.1
|
การกำหนดมาตรฐานอ้างอิงระหว่างรัฐ
|
การกำหนดและชื่อเรื่องของมาตรฐานอ้างอิงระหว่างประเทศและการกำหนดแบบมีเงื่อนไขของระดับการปฏิบัติตามมาตรฐานอ้างอิงระหว่างรัฐ
|
|
GOST ISO 1940-1-2007
|
ISO 1940-1:1986. การสั่นสะเทือน ข้อกำหนดสำหรับคุณภาพการถ่วงสมดุลของโรเตอร์แบบแข็ง ส่วนที่ 1 การกำหนดค่าความไม่สมดุลที่ยอมให้ได้ (IDT)
|
|
GOST ISO 5348-2002
|
ISO 5348:1999. การสั่นสะเทือนและการกระแทก การติดตั้งกลไกของมาตรความเร่ง (IDT)
|
|
GOST ISO 7919-1-2002
|
ISO 7919-1:1996. การสั่นสะเทือนของเครื่องจักรที่ไม่ลูกสูบ การวัดเพลาหมุนและเกณฑ์การประเมิน ส่วนที่ 1 แนวทางทั่วไป (IDT)
|
|
GOST ISO 10816-1-97
|
ISO 10816-1:1995. การสั่นสะเทือน การประเมินสภาพเครื่องจักรโดยการวัดการสั่นสะเทือนของชิ้นส่วนที่ไม่หมุน ส่วนที่ 1 แนวทางทั่วไป (IDT)
|
|
GOST ISO 10816-3-2002
|
ISO 10816-3:1998. การสั่นสะเทือน การประเมินสภาพเครื่องจักรโดยการวัดการสั่นสะเทือนของชิ้นส่วนที่ไม่หมุน ส่วนที่ 3 เครื่องจักรอุตสาหกรรมที่มีกำลังที่กำหนดมากกว่า 15 kW และความเร็วที่กำหนด 120 ถึง 15,000 รอบต่อนาที การวัดในแหล่งกำเนิด (IDT)
|
|
GOST 10921-90
|
ISO 5801:1997. พัดลมอุตสาหกรรม. การทดสอบประสิทธิภาพโดยใช้ท่อมาตรฐาน (NEQ)
|
|
GOST 19534-74
|
ISO 1925:2001. การสั่นสะเทือน การถ่วงสมดุล คำศัพท์ (NEQ)
|
|
GOST 24346-80
|
ISO 2041:1990. การสั่นสะเทือนและการกระแทก คำศัพท์ (NEQ)
|
|
GOST 31322-2006 (ISO 8821:1989)
|
ISO 8821:1989. การสั่นสะเทือน การถ่วงสมดุล แนวทางสำหรับการคำนึงถึงผลของร่องสลักเมื่อถ่วงสมดุลเพลาและชิ้นส่วนที่ติดตั้ง (MOD)
|
|
GOST 31351-2007 (ISO 14695:2003)
|
ISO 14695:2003. พัดลมอุตสาหกรรม. วิธีการวัดการสั่นสะเทือน (MOD)
|
|
หมายเหตุ: การกำหนดระดับการปฏิบัติตามข้อกำหนดของมาตรฐานตามเงื่อนไขต่อไปนี้จะถูกนำมาใช้ในตารางนี้: IDT – มาตรฐานที่เหมือนกัน;
|
|
0 Comments