Med Balanset-1A kan du måle den relative vibration af rotoren ved hjælp af berøringsfri lineære enkodere.
1.1 Valg af sensortype og indstilling.
Afhængigt af opgaven kan enten vibrationssensorer eller forskydningssensorer bruges til målingerne.
For at vælge sensortype skal man på panelet "Sensortype" (nederst i hovedvinduet) sætte et mærke i feltet "Vibro" eller "Lineær".
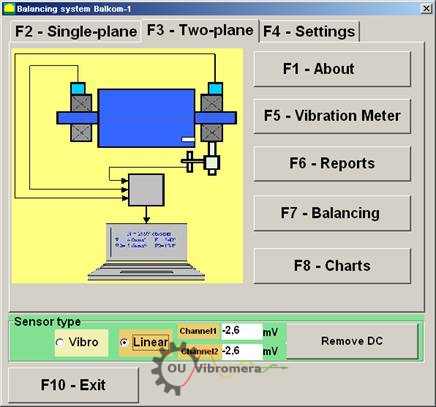
Fig. 1. Det vigtigste arbejdsvindue i Balanset-programmet.T
Før målingen startes, er det nødvendigt at sikre, at sensorernes konverteringskoefficienter er indstillet korrekt. Til dette formål skal du trykke på knappen "F4-Settings" i programmets hovedarbejdsvindue (se fig. 1) og gå til indstillingsvinduet, der er designet til at indtaste konverteringskoefficienter (se fig. 2).
I arbejdsvinduet vist i fig. 2 skal konverteringskoefficienterne for lineære sensorer og vibrationssensorer indtastes i de tilsvarende felter. Disse koefficienter er angivet i instrumentpasset. Normalt behøver du ikke at ændre dem.
For de lineære forskydningssensorer, der bruges i sættet til Balanset-1A-instrumentet, er konverteringskoefficienterne henholdsvis lig med:
Kprl1= 0,94 mV/μm (konverteringskoefficient for sensoren i den første kanal);
Kprl2 = 0,94 mV/μm (konverteringskoefficient for sensoren i den 2. kanal.
For at fungere korrekt skal den lineære encoder installeres i en vis afstand fra måleobjektets overflade. Den nominelle afstand mellem overfladen og enden af sensoren er 3,5 mm. I dette tilfælde er der en konstant spænding på 2,48 volt på sensorens udgang. Denne spænding vil blive vist i felterne "Channel1" og "Channel2" for henholdsvis den første og den anden kanal.
For at kompensere for det skal du trykke på knappen "Fjern DC". En lille resterende forskydning vil ikke forstyrre målingen.
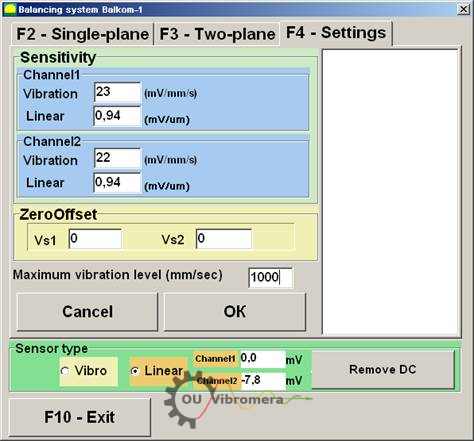
Fig. 2. Arbejdsvindue til indtastning af konverteringskoefficienter og valg af type af anvendte sensorer
Giv agt!
De specificerede værdier for nominel frigang og omregningsfaktorerne for de lineære enkodere er angivet for rotorer fremstillet af stål.
For rotorer fremstillet af andre metaller (kobber, bronze, aluminium) skal den nominelle frigang og sensorernes konverteringskoefficienter bestemmes eksperimentelt af brugeren ved at udføre kalibrering.
Tryk på knappen "OK" for at gemme de ændrede parametre. De nye parametre gemmes i en fil og bruges til yderligere målinger.
1.2 Måling af rotorens radiale udløb.
Rotorens radiale udløb kan måles med berøringsfri prober i to planer i henhold til skemaet vist i fig. 3.
For at måle og plotte tidsfunktionen og rotorudløbsspektret, hvis det er nødvendigt, skal der udføres en række forberedende operationer, herunder:
- Vælg diametrale sektioner af rotoren, hvor målingerne skal udføres;
- at installere berøringsfri lineære forskydningssensorer 5 og 6 og fasevinkelsensor 7 på maskinens seng ved hjælp af specielle anordninger (f.eks. magnetiske stativer);
- Tilslut nærhedssensorer for lineær bevægelse til stik X1 og X2, og fasevinkelsensoren til stik X3 på måleenheden;
- Indstil et nominelt målegab ∆ mellem rotoroverfladen og sensorelementet for hver lineær enkoder (for rotoren lavet af stål er ∆ = 3,5 mm);
- placer det refleksmærke på rotoren, der kræves til udløsning af fasevinkelsensoren 7, og kontroller, at sensoren udløses;
- tilslut måleenheden til computeren.
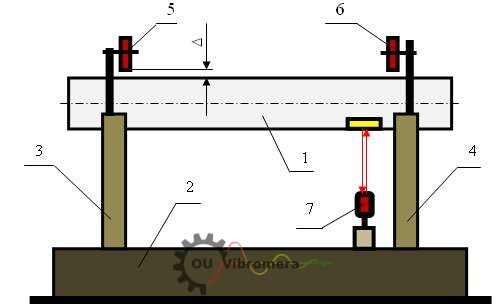
Fig. 3. Måling af rotorens radiale udløb
Hvis du trykker på knappen "F8 - Diagrammer" i hovedarbejdsvinduet (se fig. 1), viser computerskærmen arbejdsvinduet "Grafer" (se fig. 5), der er designet til at bygge forskellige slags grafer over rotorens radiale udløb.
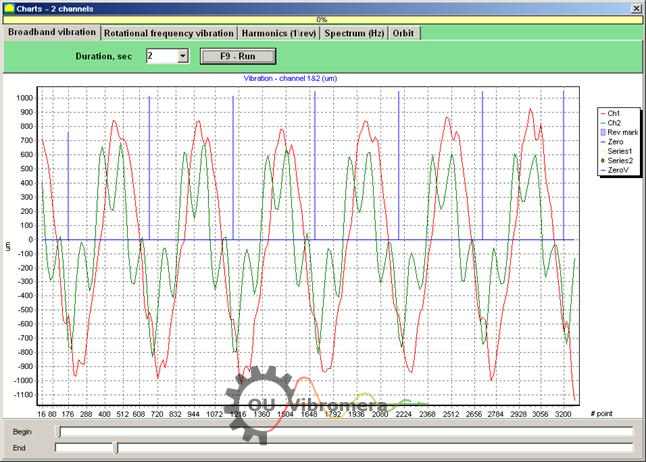
Fig. 5. Arbejdsvinduet i tilstanden "Diagrammer"
Når du trykker på knappen "Bredbåndsvibration" i dette vindue, vises tidsfunktionen for rotorens radiale udløb.
Hvis der trykkes på knappen "Rotationsfrekvensvibration", vises tidsfunktionen for den reciprokke komponent af rotorens radiale udløb.
Hvis du trykker på knappen "Harmonics (1/rev)", vil displayet vise en nedbrydningsgraf af rotorens udløb i en harmonisk serie. Den første harmoniske svarer til vibrationsværdien ved den modsatte rotorfrekvens (1x), den anden - ved den dobbelte frekvens (2x) osv.
Ved at trykke på knappen "Spectrum (Hz)" viser displayet spektret for rotorens radiale udløb.
Ved at trykke på knappen "Orbit" vises grafen for rotorens bane (præcession).
1.3 Konstruktion af rotorbanegrafen.
Konstruktion af rotorbanegrafen kan udføres i henhold til skemaet vist i fig. 6.

Fig. 6. Skema for måling af rotorens bane Skema over måling af rotorens bane 1a - rotor (endebillede); 1b - rotor (sidebillede); 2, 3 - berøringsfri sensorer; 4 - refleksionsmærke for fasevinkelsensor.
For at foretage en måling og opbygge en tilsvarende graf er det nødvendigt at udføre en række forberedende operationer, herunder:
- Monter de berøringsfri lineære enkodere 2 og 3 i en af rotorens diametrale sektioner i en vinkel på 90° i forhold til hinanden, forudsat at enkoder 2's måleakse skal falde sammen med X-aksen, og enkoder 3's måleakse skal falde sammen med Y-aksen;
- Indstil den nominelle måleafstand ∆x (∆u) mellem rotoroverfladen og sensorelementet på hver lineær enkoder (for stål ∆ = 3,5 mm);
- Indstil fasevinkelsensoren (ikke vist i skemaet) i X-Z-planet, som falder sammen med installationsplanet for den berøringsfri sensor 2;
- sætte et reflekterende mærke 4 på rotoren 1 i X - Z-planet, hvilket er nødvendigt for fasevinkelsensorens funktion;
- Tilslut de berøringsfrie lineære enkodere 2 og 3 til stik X1 og X2, og fasevinkelenkoderen til stik X3 på måleenheden;
- tilslut måleenheden til computeren.
Sådan starter du målingen af rotorens bane i hovedvinduet (se fig. 1)
Tryk på knappen "F8 - Diagrammer" og gå til arbejdsvinduet "Grafer" (se fig. 5), som er designet til at bygge forskellige slags grafer over rotorens radiale udløb.
I dette arbejdsvindue skal du trykke på knappen "Orbit", hvorefter arbejdsvinduet vises på computerskærmen, hvor den nødvendige cyklus af målinger foretages (se fig. 7).
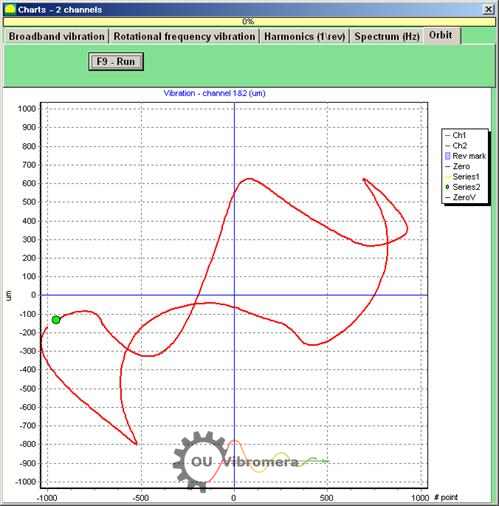
Fig.7. Graf over rotorens bane. Balanset software.
For at fortsætte arbejdet i det specificerede arbejdsvindue (se fig. 7) skal du tænde for rotorens rotation og ved at trykke på knappen "F9 - RUN" udføre måling af de øjeblikkelige værdier af rotorens radiale udløb Sxi og Sui i en periode svarende til en rotoromdrejning.
Rækken af øjeblikkelige værdier Sxi og Sui opnået under målingen bruges til at beregne banekoordinaterne for den kontrollerede rotor, hvilket udføres ved hjælp af formlen:
S∑i = √ (Sxi² + Syi²) (1)
hvor S∑i er den øjeblikkelige værdi af rotorens banekoordinat, beregnet for det i'te punkt på grafen;
Sxi - øjeblikkelig værdi af rotorens radiale udløb, målt ved koordinat X med sensor 1 i det i'te punkt;
Sxi - øjeblikkelig værdi af rotorens radiale udløb, målt ved koordinat Y med sensor 2 i det i'te punkt.
