Mjerenje relativne vibracije rotora pomoću beskontaktnih senzora linearnog pomaka
S Balanset-1A Možete izmjeriti relativno vibracija od rotor koristeći nekontaktne linearne enkodere.
1.1 Odabir vrste senzora i postavki
Ovisno o zadatku, za mjerenja se mogu koristiti senzori vibracija ili senzori pomaka. Za odabir vrste senzora potrebno je na ploči “Sensor type” (na dnu glavnog prozora) staviti kvačicu u polje “Vibro” ili “Linear”.
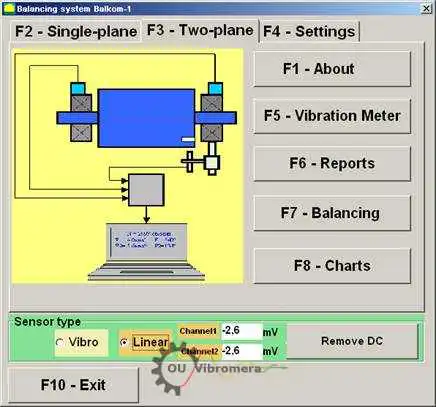
Slika 1. Glavni radni prozor programa Balanset.T
Before starting the measurement it is necessary to make sure that the conversion coefficients of the sensors are set correctly. For this purpose press the button “F4-Settings” in the main working window of the program (see Fig. 1) and go to the settings window designed for entering conversion coefficients (see Fig. 2).
U radnom prozoru prikazanom na slici 2 u odgovarajuća polja treba unijeti pretvorbene koeficijente linearnog i vibracijskog senzora. Ti su koeficijenti navedeni u tehničkoj dokumentaciji instrumenta. Obično ih nije potrebno mijenjati.
Za linearne pomak Za senzore korištene u komplektu instrumenta Balanset-1A, pretvorbeni koeficijenti su redom jednaki:
- Kprl1= 0,94 mV/μm (konverzijski koeficijent senzora 1. kanala);
- Kprl2 = 0,94 mV/μm (konverzijski koeficijent senzora drugog kanala)
For proper operation, the linear encoder must be installed at a certain distance from the surface of the object of measurement. The nominal clearance between the surface and the end of the sensor is 3.5 mm. In this case there is a constant voltage of 2.48 volts at the sensor output. This voltage will be shown in the fields “Channel1” and “Channel2” for the first and second channels respectively.
To compensate it you must press the button “Remove DC”. A small residual offset will not interfere with the measurement.
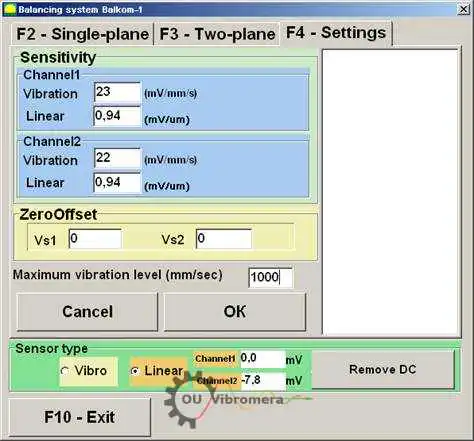
Slika 2. Radni prozor za unos koeficijenata pretvorbe i odabir vrste korištenih senzora
Pažnja! Navedeni nominalni zazori i pretvorbeni faktori linearnog enkodera odnose se na rotore od čelika. Za rotore od drugih metala (bakra, bronce, aluminija) nominalni zazor i koeficijenti pretvorbe senzora moraju se eksperimentalno odrediti od strane korisnika provođenjem kalibracije.
To save the changed parameters press “OK” button. The new parameters will be saved in a file and used for further measurements.
1.2 Mjerenje radijalnog odskoka rotora
Radijalno odstupanje rotora može se mjeriti beskontaktnim sondama sonde za blizinu u dvije ravnine prema shemi prikazanoj na slici 3. Kako bi se izmjerila i prikazala vremenska funkcija i spektar radijalnog odstupanja rotora, po potrebi je potrebno provesti niz pripremnih radnji, uključujući:
- – select diametrical sections of the rotor, in which the measurements will be carried out;
- postaviti nekontaktne senzore linearnog pomaka 5 i 6 i faza senzor faznog kuta 7 na postolju stroja pomoću posebnih uređaja (npr. magnetskih stativa);
- – connect proximity sensors of linear motion to connectors X1 and X2, and phase angle sensor to connector X3 of the measuring unit;
- – set a nominal measuring gap ∆ between the rotor surface and the sensing element for each linear encoder (for the rotor made of steel ∆ = 3.5 mm);
- – place on the rotor the reflective mark required for triggering for the phase angle sensor 7 and check the sensor triggering;
- Povežite mjernu jedinicu s računalom.
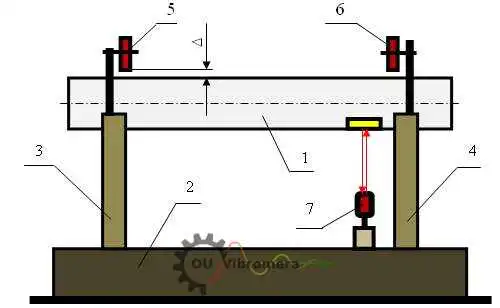
Slika 3. Mjerenje radijalnog odstupanja rotora
If you press the button “F8 – Charts” in the main working window (see Fig. 1), the computer display shows the working window “Graphs” (see Fig. 5), designed to build different kinds of graphs of radial run-out of the rotor.
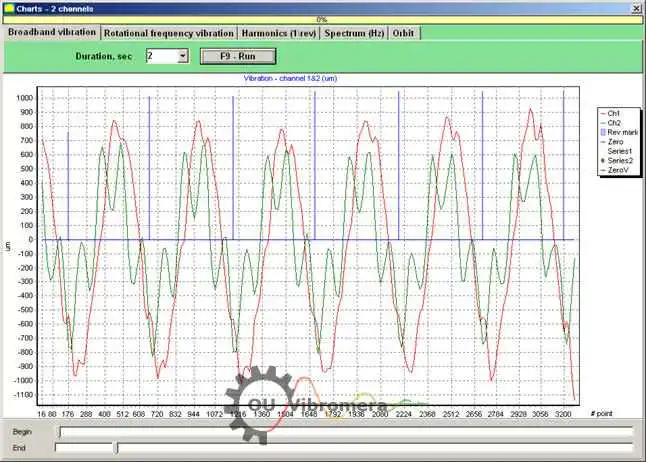
Fig. 5. The working window of the “Charts” mode
Gumbi u ovom prozoru izrađuju sljedeće grafikone:
- When you press the “Broadband vibration” button in this window, the time function of the rotor radial runout is displayed.
- If the “Rotation frequency vibration” button is pressed, the time function of the reciprocal component of the rotor radial runout is displayed.
- If you press the button “Harmonics (1/rev)”, the display will show a decomposition graph of the rotor runout into a harmonic series. The first harmonic corresponds to the value of vibration at the reverse rotor frequency (1x), the second one – at the double frequency (2x), etc.
- By pressing the button “Spectrum (Hz)” the display shows the spectrum of the radial run-out of the rotor.
- By pressing the button “Orbit” the graph of rotor orbit (precession) is displayed.
1.3 Izgradnja grafa orbite rotora
Konstrukcija grafa orbite rotora može se izvesti prema shemi prikazanoj na slici 6.

Fig. 6. Scheme of rotor orbit measurement 1a – rotor (end view); 1b – rotor (side view); 2, 3 – non-contact sensors; 4 – reflection mark of phase angle sensor.
Kako bi se obavilo mjerenje i izgradio odgovarajući grafikon, potrebno je provesti niz pripremnih operacija, uključujući:
- – install the non-contact linear encoders 2 and 3 in one of the diametrical sections of the rotor at an angle of 90° to each other, provided that the measuring axis of encoder 2 must coincide with the X axis, and the measuring axis of encoder 3 must coincide with the Y axis;
- postavite nominalni mjerni zazor ∆x (∆y) između površine rotora i osjetnog elementa svakog linearnog enkodera (za čelik ∆ = 3.5 mm);
- – set the phase angle sensor (not shown in the scheme) in the X – Z plane, coinciding with the installation plane of non-contact sensor 2;
- postaviti reflektirajući znak 4 na rotoru 1 u ravnini X–Z, što je potrebno za rad senzora faznog kuta;
- – connect non-contact linear encoders 2 and 3 to connectors X1 and X2, and phase angle encoder to connector X3 of the measuring unit;
- Povežite mjernu jedinicu s računalom.
Za početak mjerenja orbite rotora u glavnom radnom prozoru (vidi sl. 1) pritisnite gumb “F8 – Grafovi” i prijeđite u radni prozor “Grafovi” (vidi sl. 5), koji je namijenjen za izradu različitih vrsta grafikona radijalne razmaka rotora. U ovom radnom prozoru morate pritisnuti gumb “Orbit”, nakon čega se na zaslonu računala pojavljuje radni prozor u kojem se provodi potreban ciklus mjerenja (vidi sl. 7).

Sl. 7. Graf orbite rotora. Softver Balanset.
Za nastavak rada u navedenom radnom prozoru (vidi sl. 7) morate uključiti rotaciju rotora i pritiskom na tipku “F9 – RUN” izvršiti mjerenje trenutačnih vrijednosti radijalnog izbijanja rotora Sxi i Syi tijekom razdoblja jednakog jednom okretaju rotora.
Polje trenutačnih vrijednosti Sxi i Syi dobivenih tijekom mjerenja koristi se za crtanje orbite kontroliranog rotora (svaka i-ta točka orbite ima koordinate Sxi, Syi). Trenutačna veličina radijalnog pomaka izračunava se formulom:
S∑i = √ (Sxi² + Syi²) (1)
gdje je S∑i trenutačna vrijednost veličine radijalnog pomaka (duljina radijus-vektora orbite rotora), izračunata za i-tu točku grafa;
- Sxi – trenutačna vrijednost radijalnog izbijanja rotora, izmjerena duž osi X senzorom 2 (vidi sl. 6) u i-toj točki;
- Syi – trenutačna vrijednost radijalnog izbijanja rotora, izmjerena duž osi Y senzorom 3 (vidi sl. 6) u i-toj točki.