非接触型直線変位センサーを用いたローターの相対振動の測定
を使用すると、 バランセット-1A の相対振動を測定できます 振動 の ローター 非接触式リニアエンコーダを使用する。
1.1 センサーの種類の選定と設定
測定対象に応じて、振動センサーまたは変位センサーのいずれかを使用できます。センサーの種類を選択するには、メインウィンドウ下部の「センサータイプ」パネルにある「Vibro」または「Linear」の欄にチェックを入れる必要があります。
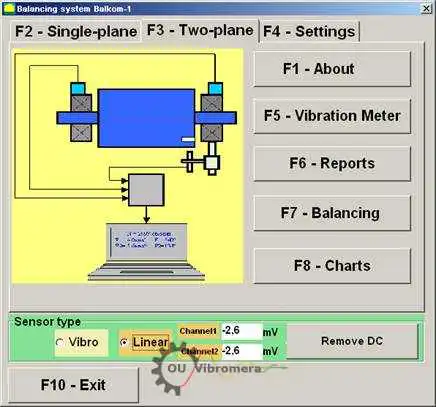
図1.Balansetプログラムのメイン・ウィンドウ。
測定を開始する前に、センサーの変換係数が正しく設定されていることを確認する必 要があります。このためには、プログラムのメイン作業ウィンドウ(図1参照)で "F4-Settings "ボタンを押し、変換係数を入力するために設計された設定ウィンドウ(図2参照)に進みます。
図 2 に示す作業ウィンドウの対応するフィールドに、リニアセンサと振動センサの変換係 数を入力します。これらの係数は計器のパスポートで指定されています。通常は変更する必要はありません。
リニア 変位 Balanset-1A装置のセットで使用されるセンサーについて、変換係数はそれぞれ以下の通りである:
- Kprl1= 0.94 mV/μm(第1チャンネルのセンサーの変換係数);
- Kprl2 = 0.94 mV/μm(第2チャンネルのセンサーの変換係数。
リニアエンコーダを正しく動作させるためには、測定対象物の表面から一定の距離をおいて設置する必要があります。表面とセンサーの端部間の公称クリアランスは3.5mmです。この場合、センサー出力には2.48ボルトの定電圧が発生します。この電圧は、第 1 チャンネルと第 2 チャンネルの "Channel1 "と "Channel2 "にそれぞれ表示されます。
これを補正するには、"Remove DC "ボタンを押す必要があります。わずかな残留オフセットが測定に支障をきたすことはありません。
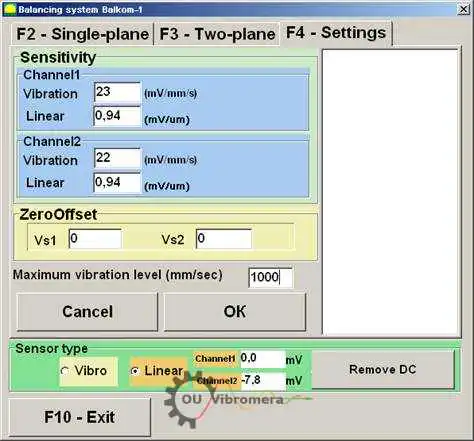
図2.変換係数を入力し、使用するセンサーの種類を選択するための作業ウィンドウ
注意! リニアエンコーダの公称クリアランスおよび変換係数の指定値は、鋼製のローターを対象としたものです。その他の金属(銅、青銅、アルミニウム)製のローターについては、ユーザーが校正を行うことにより、公称クリアランスおよびセンサーの変換係数を実験的に決定する必要があります。
変更したパラメーターを保存するには、「OK」ボタンを押します。新しいパラメータはファイルに保存され、以降の測定に使用されます。
1.2 ローターの半径方向振れの測定
ロータの半径方向振れは、非接触式で測定できます 近接プローブ 図3に示す構成に従って、2つの平面上で測定を行う。時間関数およびロータの振れスペクトルを測定・プロットするには、必要に応じて、以下の準備作業を行う必要がある:
- - 測定が行われるローターの直径部分を選択する;
- 非接触式リニア変位センサー5および6を取り付けるため、 位相 専用器具(磁気三脚など)を使用して、機械ベッド上の角度センサー7を固定する;
- 直線運動用近接センサーを測定ユニットのコネクタX1およびX2に接続し、位相角センサーをコネクタX3に接続する;
- - 各リニアエンコーダのロータ表面と検出エレメント間の公称測定ギャップ∆を設定します(スチール製ロータの場合∆ = 3.5mm);
- 位相角センサー7のトリガ動作に必要な反射マークをローターに配置し、センサーのトリガ動作を確認してください;
- 測定ユニットをコンピュータに接続してください。
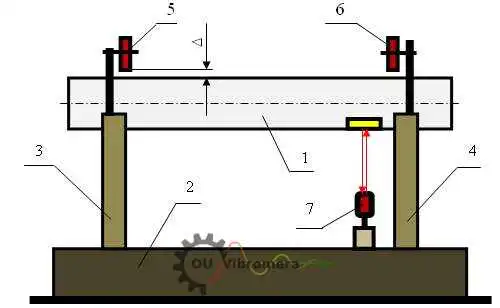
図3.ローターの半径方向振れの測定
メイン作業ウィンドウ(図1参照)で "F8 - Charts "ボタンを押すと、コンピュータ・ディスプレイには "Graphs "ウィンドウ(図5参照)が表示され、ローターの半径方向振れの様々なグラフを作成することができます。
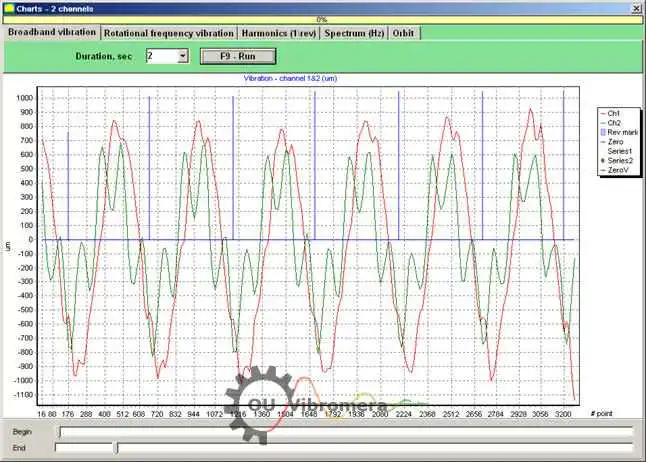
図5.チャート」モードの作業ウィンドウ
このウィンドウのボタンをクリックすると、以下のグラフが作成されます:
- このウィンドウで「広帯域振動」ボタンを押すと、ローター半径方向の振れの時間関数が表示されます。
- 回転数振動」ボタンを押すと、ローター半径方向振れの逆数成分の時間関数が表示されます。
- 高調波(1/rev) "ボタンを押すと、ローターの振れを高調波系列に分解したグラフが表示されます。最初のハーモニクスはローターの逆周波数(1x)での振動の値に対応し、2番目のハーモニクスは2倍の周波数(2x)での振動の値に対応します。
- Spectrum (Hz)" ボタンを押すと、ローターの半径方向の振れのスペクトルが表示されます。
- Orbit "ボタンを押すと、ローターの軌道(歳差運動)のグラフが表示されます。
1.3 ローター軌道図の作成
ローター軌道グラフの作成は、図6に示すスキームに従って行うことができる。

図6.1a-ローター(端面図)、1b-ローター(側面図)、2、3-非接触センサー、4-位相角センサーの反射マーク。
測定を行い、それに対応するグラフを作成するためには、以下のような多くの準備作業を行う必要がある:
- - 非接触リニアエンコーダ2および3を、ロータの直径方向断面の一方に、互いに90°の角度で設置する。ただし、エンコーダ2の測定軸はX軸と一致し、エンコーダ3の測定軸はY軸と一致しなければならない;
- ローター表面と各リニアエンコーダの検出素子との間に、公称測定ギャップ ∆x (∆y) を設定します(鋼の場合 ∆ = 3.5 mm)。
- - X-Z平面に位相角センサー(スキームには示されていない)をセットし、非接触センサー2の設置平面と一致させる;
- 位相角センサーの動作に必要な、X–Z面上のローター1に反射マーカー4を設置する;
- - 非接触リニアエンコーダ 2 と 3 を測定ユニットのコネクタ X1 と X2 に、位相角エンコーダをコネクタ X3 に接続します;
- 測定ユニットをコンピュータに接続してください。
メイン作業ウィンドウ(図1参照)でローターの軌道測定を開始するには、「F8 – Charts」ボタンを押して、ローターの半径方向振れに関する各種グラフを作成するための作業ウィンドウ「Graphs」(図5参照)に移動します。 この作業ウィンドウで「Orbit」ボタンを押すと、コンピュータ画面に作業ウィンドウが表示され、そこで必要な測定サイクルが実行されます(図7参照)。

図7.ローター軌道のグラフ。Balansetソフトウェア。
指定された作業ウィンドウ(図 7 参照)で作業を続行するには、ローター回転を開始し、“F9 – RUN” ボタンを押して、ローター 1 回転に等しい期間のローター瞬時半径振れ値 Sxi および Syi を測定する必要があります。
測定中に取得された瞬時値 Sxi および Syi の配列は、管理対象ローターの軌道をプロットするために使用されます(軌道上の各 i 番目の点は座標 Sxi, Syi を持ちます)。瞬時半径変位量は次式で計算されます。
S∑i = √ (Sxi² + Syi²) (1)
ここで S∑i は半径変位量の瞬時値(ローター軌道の半径ベクトル長)であり、グラフの i 番目の点について計算されます。
- Sxi – i 番目の点において、センサー 2(図 6 参照)で X 軸方向に測定されたローターの瞬時半径振れ値;
- Syi – i 番目の点において、センサー 3(図 6 参照)で Y 軸方向に測定されたローターの瞬時半径振れ値。