Naudodami "Balanset-1A" galite matuoti rotoriaus santykinę vibraciją naudodami bekontakčius linijinius koduotojus.
1.1 Jutiklio tipo pasirinkimas ir nustatymas.
Priklausomai nuo užduoties, matavimams galima naudoti vibracijos arba poslinkio jutiklius.
Norint pasirinkti jutiklio tipą, reikia skydelyje "Jutiklio tipas" (pagrindinio lango apačioje) pažymėti laukelį "Vibro" arba "Linear".
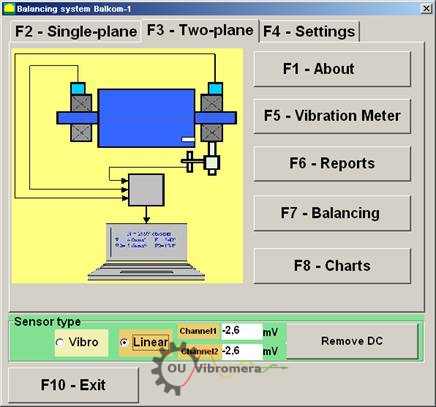
1 pav. Pagrindinis programos Balanset darbo langas.T
Prieš pradedant matuoti būtina įsitikinti, kad jutiklių perskaičiavimo koeficientai nustatyti teisingai. Tuo tikslu pagrindiniame programos darbo lange paspauskite mygtuką "F4-Settings" (žr. 1 pav.) ir pereikite į nustatymų langą, skirtą perskaičiavimo koeficientams įvesti (žr. 2 pav.).
2 pav. parodytame darbo lange atitinkamuose laukuose reikia įvesti linijinių ir vibracijos jutiklių perskaičiavimo koeficientus. Šie koeficientai nurodyti prietaiso pase. Paprastai jų keisti nereikia.
Prietaiso "Balanset-1A" rinkinyje naudojamų linijinių poslinkio jutiklių perskaičiavimo koeficientai atitinkamai yra tokie:
Kprl1 = 0,94 mV/μm (1-ojo kanalo jutiklio konversijos koeficientas);
Kprl2 = 0,94 mV/μm (2-ojo kanalo jutiklio konversijos koeficientas.
Kad linijinis daviklis veiktų tinkamai, jis turi būti sumontuotas tam tikru atstumu nuo matuojamo objekto paviršiaus. Nominalus atstumas tarp paviršiaus ir jutiklio galo yra 3,5 mm. Šiuo atveju jutiklio išėjime yra pastovi 2,48 V įtampa. Ši įtampa bus rodoma laukuose "Channel1" ir "Channel2", skirtuose atitinkamai pirmajam ir antrajam kanalui.
Norėdami jį kompensuoti, turite paspausti mygtuką "Remove DC". Nedidelis likutinis poslinkis netrukdys matuoti.
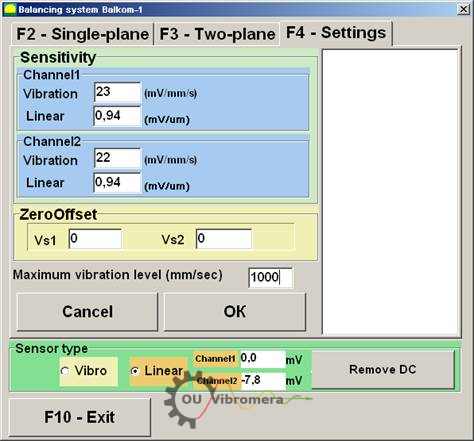
2 pav. Perskaičiavimo koeficientų įvedimo ir naudojamų jutiklių tipo pasirinkimo darbo langas
Dėmesio!
Nurodytos nominaliosios tarpinės vertės ir linijinių daviklių perskaičiavimo koeficientai pateikiami rotoriams, pagamintiems iš plieno.
Iš kitų metalų (vario, bronzos, aliuminio) pagamintų rotorių vardinį tarpą ir jutiklių perskaičiavimo koeficientus naudotojas turi nustatyti eksperimentiškai, atlikdamas kalibravimą.
Norėdami išsaugoti pakeistus parametrus, paspauskite mygtuką "OK". Nauji parametrai bus įrašyti į failą ir naudojami tolesniems matavimams.
1.2 Rotoriaus radialinio bėgimo matavimas.
Rotoriaus radialinį išsikišimą galima matuoti bekontakčiais zondais dviejose plokštumose pagal 3 pav. pateiktą schemą.
Norint išmatuoti ir nubraižyti laiko funkciją ir rotoriaus bėgimo spektrą, jei reikia, reikia atlikti keletą parengiamųjų operacijų, įskaitant:
- pasirinkite rotoriaus skersmens atkarpas, kuriose bus atliekami matavimai;
- naudojant specialius įtaisus (pvz., magnetinius trikojus) ant mašinos lovio sumontuoti bekontakčius linijinio poslinkio jutiklius 5 ir 6 bei fazinio kampo jutiklį 7;
- linijinio judėjimo artumo jutiklius prijunkite prie X1 ir X2 jungčių, o fazinio kampo jutiklį - prie matavimo įrenginio X3 jungties;
- kiekvienam linijiniam davikliui nustatykite vardinį matavimo tarpą ∆ tarp rotoriaus paviršiaus ir jutiklio (plieniniam rotoriui ∆ = 3,5 mm);
- ant rotoriaus uždėkite atspindintį ženklą, reikalingą fazės kampo jutikliui 7 sužadinti, ir patikrinkite, ar jutiklis suveikė;
- prijunkite matavimo įrenginį prie kompiuterio.
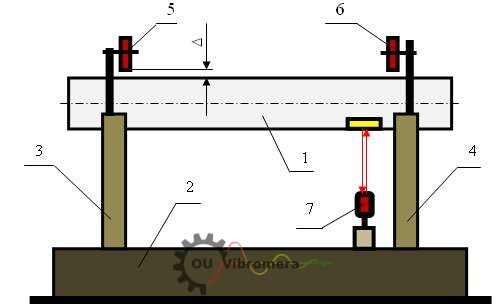
3 pav. Rotoriaus radialinio bėgimo matavimas
Pagrindiniame darbo lange (žr. 1 pav.) paspaudus mygtuką "F8 - Grafikai", kompiuterio ekrane rodomas darbo langas "Grafikai" (žr. 5 pav.), skirtas įvairių rūšių rotoriaus radialinio bėgimo grafikams sudaryti.
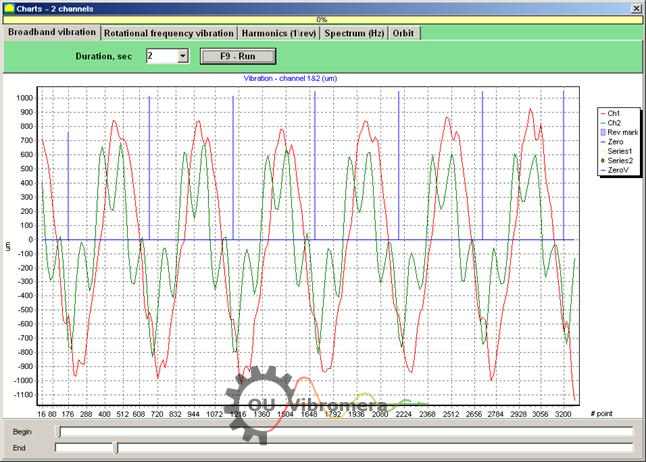
5 pav. Režimo "Diagramos" darbo langas
Šiame lange paspaudus mygtuką "Plačiajuostė vibracija", rodoma rotoriaus radialinio bėgimo laiko funkcija.
Paspaudus mygtuką "Sukimosi dažnio vibracija", rodoma rotoriaus radialinio bėgimo abipusės komponentės laiko funkcija.
Paspaudus mygtuką "Harmonikos (1/rev)", ekrane bus rodomas rotoriaus bėgimo išskaidymo į harmonikų eilę grafikas. Pirmoji harmonika atitinka virpesių vertę esant atvirkštiniam rotoriaus dažniui (1x), antroji - esant dvigubam dažniui (2x) ir t. t.
Paspaudus mygtuką "Spektras (Hz)", ekrane rodomas rotoriaus radialinio bėgimo spektras.
Paspaudus mygtuką "Orbit", rodomas rotoriaus orbitos (precesijos) grafikas.
1.3 Rotoriaus orbitos grafiko sudarymas.
Rotoriaus orbitos grafiką galima sudaryti pagal 6 pav. pateiktą schemą.

6 pav. Rotoriaus orbitos matavimo schema 1a - rotorius (galinis vaizdas); 1b - rotorius (šoninis vaizdas); 2, 3 - bekontakčiai jutikliai; 4 - fazės kampo jutiklio atspindžio ženklas.
Norint atlikti matavimą ir sudaryti atitinkamą grafiką, reikia atlikti keletą parengiamųjų veiksmų, įskaitant:
- įrengti bekontakčius linijinius daviklius 2 ir 3 vienoje iš rotoriaus skersmens sekcijų 90° kampu vienas kito atžvilgiu, jei daviklio 2 matavimo ašis turi sutapti su X ašimi, o daviklio 3 matavimo ašis turi sutapti su Y ašimi;
- nustatykite vardinį matavimo tarpą ∆x (∆u) tarp rotoriaus paviršiaus ir kiekvieno linijinio daviklio jutiklio (plienui ∆ = 3,5 mm);
- nustatykite fazinio kampo jutiklį (schemoje nepateiktas) X-Z plokštumoje, sutampančioje su bekontakčio jutiklio 2 montavimo plokštuma;
- ant rotoriaus 1 X-Z plokštumoje nustatykite atspindintį ženklą 4, kuris būtinas fazės kampo jutiklio veikimui;
- prie matavimo įrenginio X1 ir X2 jungčių prijunkite 2 ir 3 linijinius bekontakčius enkoderius, o prie X3 jungties - fazinio kampo enkoderį;
- prijunkite matavimo įrenginį prie kompiuterio.
Pagrindiniame darbo lange (žr. 1 pav.) pradėti rotoriaus orbitos matavimą
Paspauskite mygtuką "F8 - Grafikai" ir pereikite į darbo langą "Grafikai" (žr. 5 pav.), kuris skirtas sudaryti įvairių rūšių rotoriaus radialinio bėgimo grafikus.
Šiame darbo lange reikia paspausti mygtuką "Orbit", po to kompiuterio ekrane pasirodo darbo langas, kuriame atliekamas reikiamas matavimų ciklas (žr. 7 pav.).
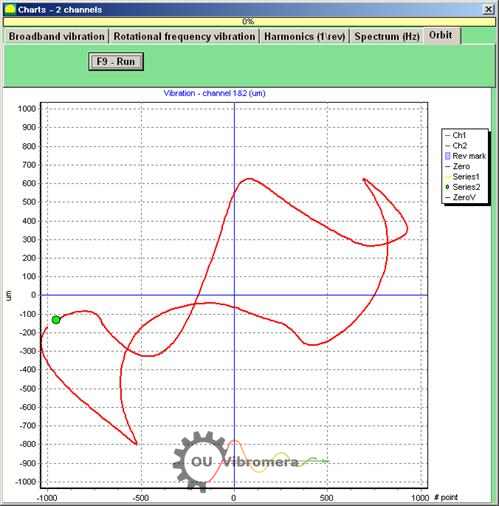
7 pav. Rotoriaus orbitos grafikas. Balanset programinė įranga.
Norėdami tęsti darbą nurodytame darbo lange (žr. 7 pav.), turite įjungti rotoriaus sukimąsi ir paspaudę mygtuką "F9 - RUN" išmatuoti momentines rotoriaus radialinio bėgimo Sxi ir Sui vertes per laikotarpį, lygų vienam rotoriaus apsisukimui.
Matavimų metu gauta momentinių verčių Sxi ir Sui aibė naudojama valdomo rotoriaus orbitos koordinatėms apskaičiuoti, o tai atliekama pagal formulę:
S∑i = √ (Sxi² + Syi²) (1)
kur S∑i - momentinė rotoriaus orbitos koordinatės vertė, apskaičiuota i-ajame grafiko taške;
Sxi - momentinė rotoriaus radialinio bėgimo vertė, išmatuota X koordinate su 1 jutikliu i-ame taške;
Sxi - momentinė rotoriaus radialinio bėgimo vertė, išmatuota pagal Y koordinatę, naudojant 2 jutiklį i-ajame taške.
