Com o Balanset-1A, é possível medir a vibração relativa do rotor usando codificadores lineares sem contato.
1.1 Seleção do tipo de sensor e configuração.
Dependendo da tarefa, os sensores de vibração ou de deslocamento podem ser usados para medições.
Para selecionar o tipo de sensor, é necessário colocar uma marca no campo "Vibro" ou "Linear" no painel "Tipo de sensor" (na parte inferior da janela principal).
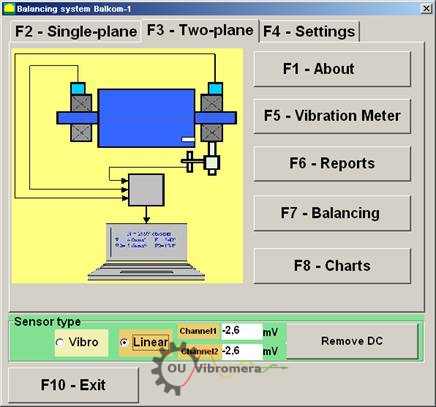
Fig. 1. A janela principal de trabalho do programa Balanset.
Antes de iniciar a medição, é necessário certificar-se de que os coeficientes de conversão dos sensores estejam definidos corretamente. Para isso, pressione o botão "F4-Settings" (Configurações) na janela principal de trabalho do programa (consulte a Fig. 1) e acesse a janela de configurações projetada para inserir os coeficientes de conversão (consulte a Fig. 2).
Na janela de trabalho mostrada na Fig. 2, nos campos correspondentes, os coeficientes de conversão dos sensores lineares e de vibração devem ser inseridos. Esses coeficientes são especificados no passaporte do instrumento. Normalmente, não é necessário alterá-los.
Para os sensores de deslocamento linear usados no conjunto do instrumento Balanset-1A, os coeficientes de conversão são respectivamente iguais a:
Kprl1= 0,94 mV/μm (coeficiente de conversão do sensor do 1º canal);
Kprl2 = 0,94 mV/μm (coeficiente de conversão do sensor do segundo canal).
Para uma operação adequada, o codificador linear deve ser instalado a uma certa distância da superfície do objeto de medição. A folga nominal entre a superfície e a extremidade do sensor é de 3,5 mm. Nesse caso, há uma tensão constante de 2,48 volts na saída do sensor. Essa tensão será mostrada nos campos "Channel1" e "Channel2" para o primeiro e o segundo canais, respectivamente.
Para compensar isso, pressione o botão "Remove DC". Um pequeno desvio residual não interferirá na medição.
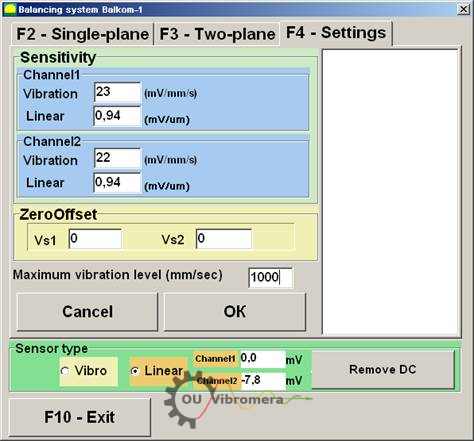
Fig. 2. Janela de trabalho para inserir os coeficientes de conversão e selecionar o tipo de sensores usados
Atenção!
Os valores especificados de folga nominal e os fatores de conversão dos codificadores lineares são fornecidos para rotores feitos de aço.
Para rotores feitos de outros metais (cobre, bronze, alumínio), a folga nominal e os coeficientes de conversão dos sensores devem ser determinados experimentalmente pelo usuário por meio de calibração.
Para salvar os parâmetros alterados, pressione o botão "OK". Os novos parâmetros serão salvos em um arquivo e usados para medições posteriores.
1.2 Medição da excentricidade radial do rotor.
A excentricidade radial do rotor pode ser medida com sondas sem contato em dois planos, de acordo com o esquema mostrado na fig. 3.
Para medir e plotar a função de tempo e o espectro de excentricidade do rotor, se necessário, várias operações preparatórias devem ser realizadas, inclusive:
- selecione as seções diametrais do rotor, nas quais as medições serão realizadas;
- para instalar os sensores de deslocamento linear sem contato 5 e 6 e o sensor de ângulo de fase 7 na base da máquina usando dispositivos especiais (por exemplo, tripés magnéticos);
- Conecte os sensores de proximidade de movimento linear aos conectores X1 e X2, e o sensor de ângulo de fase ao conector X3 da unidade de medição;
- Defina uma folga nominal de medição ∆ entre a superfície do rotor e o elemento sensor para cada codificador linear (para o rotor feito de aço, ∆ = 3,5 mm);
- Coloque no rotor a marca reflexiva necessária para o acionamento do sensor de ângulo de fase 7 e verifique o acionamento do sensor;
- Conecte a unidade de medição ao computador.
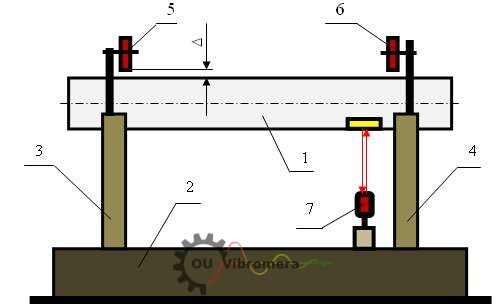
Fig. 3. Medição da excentricidade radial do rotor
Se você pressionar o botão "F8 - Charts" (F8 - Gráficos) na janela principal de trabalho (consulte a Fig. 1), o monitor do computador mostrará a janela de trabalho "Graphs" (Gráficos) (consulte a Fig. 5), projetada para criar diferentes tipos de gráficos de excentricidade radial do rotor.
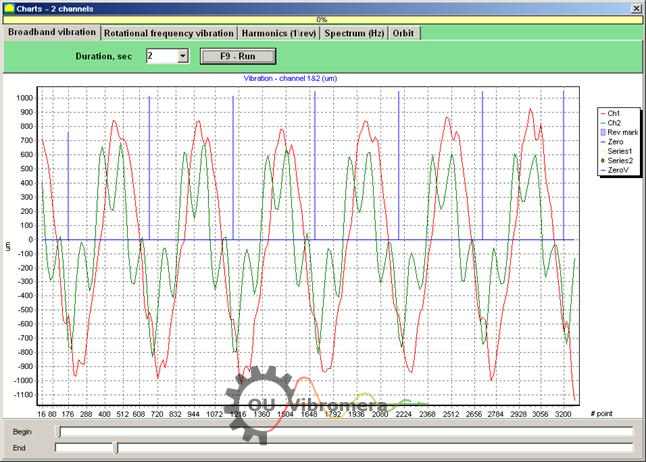
Fig. 5. A janela de trabalho do modo "Charts" (Gráficos)
Quando você pressiona o botão "Broadband vibration" (Vibração de banda larga) nessa janela, a função de tempo do desvio radial do rotor é exibida.
Se o botão "Rotation frequency vibration" (Vibração da frequência de rotação) for pressionado, a função de tempo do componente recíproco da excentricidade radial do rotor será exibida.
Se você pressionar o botão "Harmonics (1/rev)", o visor mostrará um gráfico de decomposição do desvio do rotor em uma série harmônica. O primeiro harmônico corresponde ao valor da vibração na frequência inversa do rotor (1x), o segundo - na frequência dupla (2x), etc.
Ao pressionar o botão "Spectrum (Hz)", o visor mostra o espectro da excentricidade radial do rotor.
Ao pressionar o botão "Orbit" (Órbita), o gráfico da órbita do rotor (precessão) é exibido.
1.3 Construção do gráfico da órbita do rotor.
A construção do gráfico da órbita do rotor pode ser realizada de acordo com o esquema mostrado na Fig. 6.

Fig. 6. Esquema da medição da órbita do rotor 1a - rotor (vista final); 1b - rotor (vista lateral); 2, 3 - sensores sem contato; 4 - marca de reflexão do sensor de ângulo de fase.
Para fazer uma medição e construir um gráfico correspondente, é necessário realizar várias operações preparatórias, incluindo:
- Instale os codificadores lineares sem contato 2 e 3 em uma das seções diametrais do rotor em um ângulo de 90° entre si, desde que o eixo de medição do codificador 2 coincida com o eixo X e o eixo de medição do codificador 3 coincida com o eixo Y;
- Defina a folga nominal de medição ∆x (∆u) entre a superfície do rotor e o elemento sensor de cada codificador linear (para aço, ∆ = 3,5 mm);
- Coloque o sensor de ângulo de fase (não mostrado no esquema) no plano X - Z, coincidindo com o plano de instalação do sensor sem contato 2;
- definir uma marca reflexiva 4 no rotor 1 no plano X - Z, o que é necessário para a operação do sensor de ângulo de fase;
- Conecte os codificadores lineares sem contato 2 e 3 aos conectores X1 e X2, e o codificador de ângulo de fase ao conector X3 da unidade de medição;
- Conecte a unidade de medição ao computador.
Para começar a medir a órbita do rotor na janela principal de trabalho (consulte a Fig. 1)
Pressione o botão "F8 - Charts" (F8 - Gráficos) e vá para a janela de trabalho "Graphs" (Gráficos) (consulte a Fig. 5), que foi projetada para criar diferentes tipos de gráficos de excentricidade radial do rotor.
Nessa janela de trabalho, é necessário pressionar o botão "Orbit" (Órbita), após o que a janela de trabalho é exibida na tela do computador, na qual é feito o ciclo necessário de medições (consulte a Fig. 7).
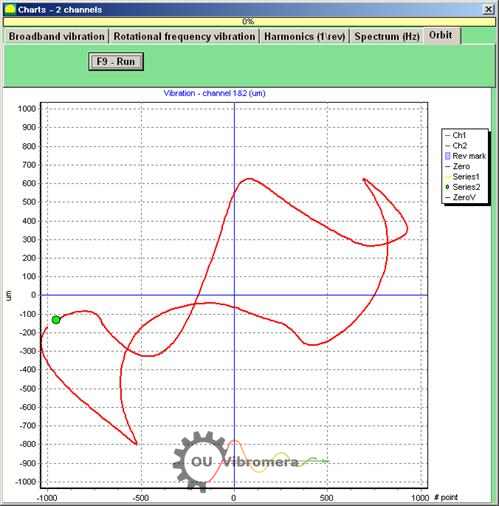
Fig.7. Gráfico da órbita do rotor. Software Balanset.
Para continuar o trabalho na janela de trabalho especificada (consulte a Fig. 7), você deve ligar a rotação do rotor e, pressionando o botão "F9 - RUN", realizar a medição dos valores instantâneos do desvio radial do rotor Sxi e Sui por um período igual a uma rotação do rotor.
A matriz de valores instantâneos Sxi e Sui obtidos durante a medição é usada para calcular as coordenadas da órbita do rotor controlado, o que é feito pela fórmula:
S∑i = √ (Sxi² + Syi²) (1)
em que S∑i é o valor instantâneo da coordenada da órbita do rotor, calculado para o i-ésimo ponto do gráfico;
Sxi - valor instantâneo do desvio radial do rotor, medido pela coordenada X com o sensor 1 no i-ésimo ponto;
Sxi - valor instantâneo do desvio radial do rotor, medido pela coordenada Y com o sensor 2 no i-ésimo ponto.
