За допомогою Balanset-1A ви можете вимірювати відносну вібрацію ротора за допомогою безконтактних лінійних енкодерів.
1.1 Вибір типу датчика та налаштування.
Залежно від завдання, для вимірювань можуть використовуватися або датчики вібрації, або датчики переміщення.
Для вибору типу датчика необхідно на панелі "Тип датчика" (внизу головного вікна) поставити позначку в полі "Вібраційний" або "Лінійний".
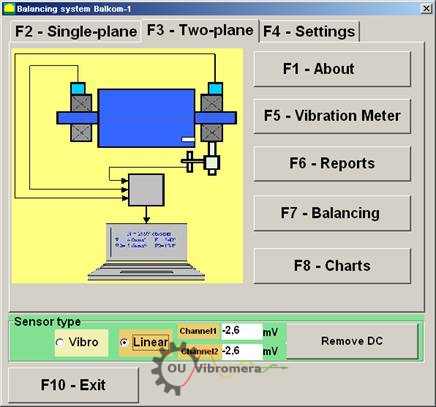
Рис. 1. Головне робоче вікно програми Balanset.T
Перед початком вимірювання необхідно переконатися, що коефіцієнти перетворення датчиків встановлені правильно. Для цього в головному робочому вікні програми (див. рис. 1) натисніть кнопку "F4-Настройки" і перейдіть у вікно налаштувань, призначене для введення коефіцієнтів перетворення (див. рис. 2).
У робочому вікні, зображеному на рис. 2, у відповідні поля слід ввести коефіцієнти перетворення лінійного та вібраційного датчиків. Ці коефіцієнти вказані в паспорті приладу. Зазвичай змінювати їх не потрібно.
Для датчиків лінійних переміщень, що використовуються в комплекті приладу "Балансет-1А", коефіцієнти перетворення відповідно дорівнюють:
Kprl1= 0,94 мВ/мкм (коефіцієнт перетворення датчика 1-го каналу);
Kprl2 = 0,94 мВ/мкм (коефіцієнт перетворення датчика 2-го каналу.
Для правильної роботи лінійний енкодер повинен бути встановлений на певній відстані від поверхні об'єкта вимірювання. Номінальний зазор між поверхнею і торцем датчика становить 3,5 мм. В цьому випадку на виході датчика буде постійна напруга 2,48 вольт. Ця напруга буде відображатися в полях "Канал1" і "Канал2" для першого і другого каналів відповідно.
Для його компенсації необхідно натиснути кнопку "Remove DC". Невелике залишкове зміщення не буде заважати вимірюванню.
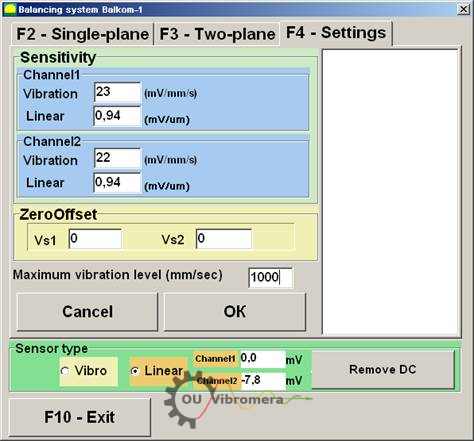
Рис. 2. Робоче вікно для введення коефіцієнтів перерахунку та вибору типу використовуваних датчиків
Струнко!
Зазначені значення номінального зазору і коефіцієнти перетворення лінійних енкодерів наведені для роторів, виготовлених зі сталі.
Для роторів з інших металів (мідь, бронза, алюміній) номінальний зазор і коефіцієнти перетворення датчиків повинні бути визначені користувачем експериментально шляхом проведення калібрування.
Для збереження змінених параметрів натисніть кнопку "ОК". Нові параметри будуть збережені у файлі і використані для подальших вимірювань.
1.2 Вимірювання радіального биття ротора.
Радіальне биття ротора можна виміряти безконтактними датчиками в двох площинах за схемою, показаною на рис. 3.
Для того, щоб виміряти і побудувати функцію часу і спектр биття ротора, при необхідності, необхідно виконати ряд підготовчих операцій, в тому числі:
- виберіть діаметральні перерізи ротора, в яких будуть проводитися вимірювання;
- встановити безконтактні датчики лінійних переміщень 5 і 6 та датчик фазового кута 7 на станину верстата за допомогою спеціальних пристосувань (наприклад, магнітних штативів);
- підключіть датчики наближення лінійного переміщення до роз'ємів X1 і X2, а датчик фазового кута - до роз'єму X3 вимірювального блоку;
- встановити номінальний вимірювальний зазор ∆ між поверхнею ротора та чутливим елементом для кожного лінійного енкодера (для ротора зі сталі ∆ = 3,5 мм);
- розмістіть на роторі світловідбиваючу мітку, необхідну для спрацьовування датчика фазового кута 7, і перевірте спрацьовування датчика;
- підключіть вимірювальний пристрій до комп'ютера.
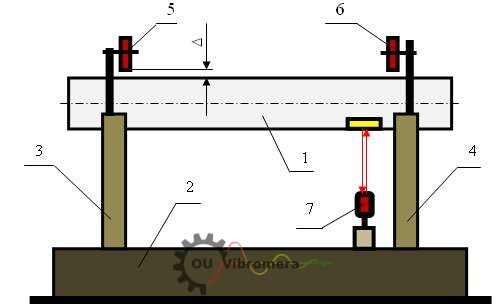
Рис. 3. Вимірювання радіального биття ротора
Якщо в головному робочому вікні (див. рис. 1) натиснути кнопку "F8 - Графіки", то на дисплеї комп'ютера з'явиться робоче вікно "Графіки" (див. рис. 5), призначене для побудови різного роду графіків радіального биття ротора.
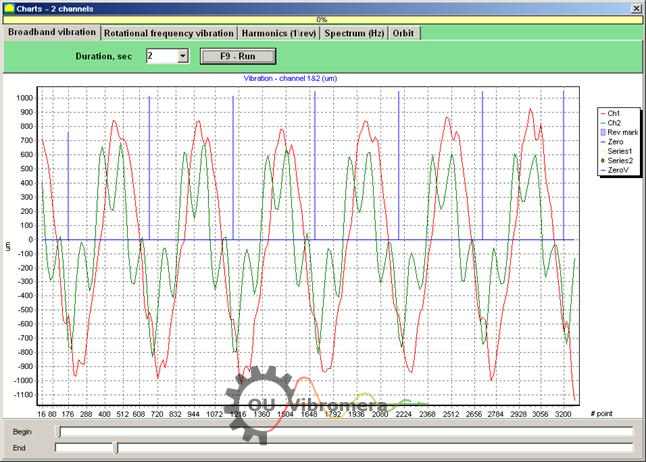
Рис. 5. Робоче вікно режиму "Графіки"
При натисканні кнопки "Широкосмугова вібрація" в цьому вікні відображається часова функція радіального биття ротора.
При натисканні кнопки "Вібрація частоти обертання" відображається часова функція зворотної складової радіального биття ротора.
Якщо натиснути кнопку "Harmonics (1/rev)", на дисплеї з'явиться графік розкладання вибігу ротора в ряд гармонік. Перша гармоніка відповідає значенню вібрації на зворотній частоті ротора (1x), друга - на подвоєній частоті (2x) і т.д.
При натисканні кнопки "Спектр (Гц)" на дисплеї відображається спектр радіального биття ротора.
При натисканні кнопки "Орбіта" відображається графік орбіти ротора (прецесії).
1.3 Побудова графіка орбіти ротора.
Побудову графіка орбіти ротора можна виконати за схемою, показаною на рис. 6.

Рис. 6. Схема вимірювання орбіти ротора 1а - ротор (вигляд з торця); 1б - ротор (вигляд збоку); 2, 3 - безконтактні датчики; 4 - мітка відбиття датчика фазового кута.
Для того, щоб провести вимірювання та побудувати відповідний графік, необхідно виконати ряд підготовчих операцій, серед яких:
- встановити безконтактні лінійні енкодери 2 і 3 в одному з діаметральних перерізів ротора під кутом 90° один до одного за умови, що вісь вимірювання енкодера 2 повинна співпадати з віссю X, а вісь вимірювання енкодера 3 - з віссю Y;
- встановити номінальний вимірювальний зазор ∆x (∆u) між поверхнею ротора та чутливим елементом кожного лінійного енкодера (для сталі ∆ = 3,5 мм);
- встановити датчик фазового кута (на схемі не показано) в площині X - Z, що збігається з площиною встановлення безконтактного датчика 2;
- встановити відбиваючу мітку 4 на роторі 1 в площині X - Z, яка необхідна для роботи датчика фазового кута;
- підключіть безконтактні лінійні енкодери 2 і 3 до роз'ємів X1 і X2, а енкодер фазового кута - до роз'єму X3 вимірювального блоку;
- підключіть вимірювальний пристрій до комп'ютера.
Для початку вимірювання орбіти ротора в головному робочому вікні (див. рис. 1)
Натискаємо кнопку "F8 - Графіки" і переходимо в робоче вікно "Графіки" (див. рис. 5), яке призначене для побудови різного роду графіків радіального биття ротора.
У цьому робочому вікні необхідно натиснути кнопку "Орбіта", після чого на дисплеї комп'ютера з'являється робоче вікно, в якому виконується необхідний цикл вимірювань (див. рис. 7).
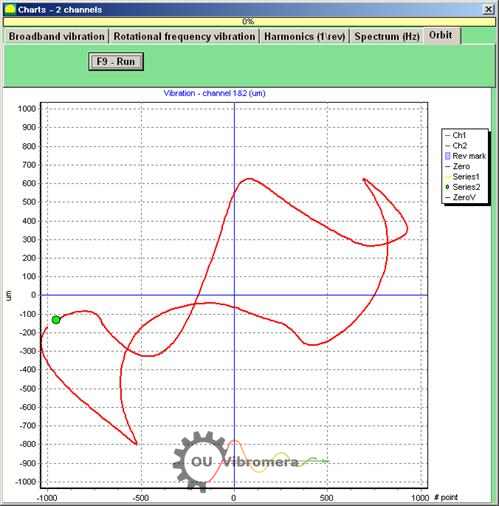
Рис.7. Графік орбіти ротора. Програмне забезпечення Balanset.
Для продовження роботи в зазначеному робочому вікні (див. рис. 7) необхідно включити обертання ротора і натисканням кнопки "F9 - RUN" виконати вимірювання миттєвих значень радіального биття ротора Sxi і Sui за період, що дорівнює одному оберту ротора.
Масив миттєвих значень Sxi та Sui, отриманих під час вимірювання, використовується для обчислення координат орбіти керованого ротора, яке виконується за формулою:
S∑i = √ (Sxi² + Syi²) (1)
де S∑i - миттєве значення координати орбіти ротора, розраховане для i-ої точки графіка;
Sxi - миттєве значення радіального биття ротора, виміряне по координаті X датчиком 1 в i-й точці;
Sxi - миттєве значення радіального биття ротора, виміряне по координаті Y датчиком 2 в i-й точці.