Suhteellisen roottorin tärinän mittaaminen kosketuksettomilla lineaarisilla siirtymäantureilla
Kun Balanset-1A voit mitata suhteellisen tärinä roottorin roottori käyttämällä kosketuksettomia lineaarisia antureita.
1.1 Anturityypin valinta ja asetukset
Tehtävästä riippuen mittauksiin voidaan käyttää joko tärinäantureita tai siirtymäantureita. Anturityypin valitsemiseksi on paneelissa “Anturityyppi” (pääikkunan alaosassa) merkittävä kenttään “Vibro” tai “Linear”.
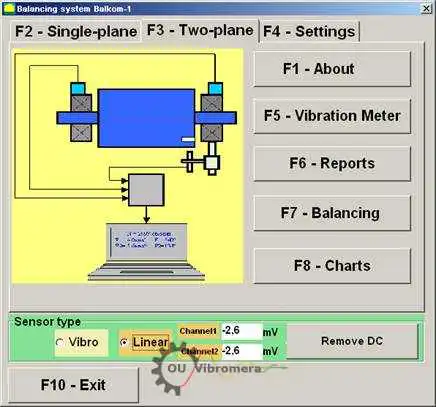
Kuva 1. Balanset-ohjelman pääikkuna.T
Ennen mittauksen aloittamista on varmistettava, että antureiden muuntokertoimet on asetettu oikein. Paina tätä varten ohjelman päätyöikkunassa painiketta “F4-Settings” (ks. kuva 1) ja siirry muuntokertoimien syöttämiseen tarkoitettuun asetusikkunaan (ks. kuva 2).
Kuvassa 2 esitetyssä työskentelyikkunassa vastaaviin kenttiin on syötettävä lineaaristen ja värähtelyantureiden muuntokertoimet. Nämä kertoimet on määritetty laitepassissa. Yleensä niitä ei tarvitse muuttaa.
Lineaarisen siirtymä Balanset-1A-laitteistossa käytettävien anturien muuntokertoimet ovat seuraavat:
- Kprl1= 0,94 mV/μm (ensimmäisen kanavan anturin muuntokerroin);
- Kprl2 = 0,94 mV/μm (toisen kanavan anturin muuntokerroin.
Jotta lineaarinen kooderi toimisi oikein, se on asennettava tietylle etäisyydelle mittauskohteen pinnasta. Nimellinen väli pinnan ja anturin pään välillä on 3,5 mm. Tällöin anturin ulostulossa on vakiojännite 2,48 volttia. Tämä jännite näkyy kentissä “Channel1” ja “Channel2” ensimmäisen ja toisen kanavan osalta.
Sen kompensoimiseksi on painettava painiketta “Remove DC”. Pieni jäännösoffset ei häiritse mittausta.
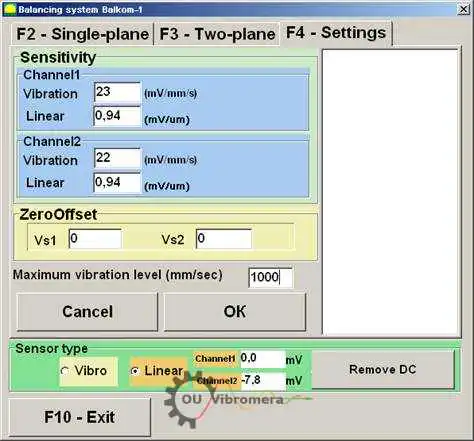
Kuva 2. Työikkuna muuntokertoimien syöttämistä ja käytettyjen antureiden tyypin valitsemista varten.
Huomio! Lineaaristen anturien nimivälyksen arvot ja muuntokertoimet on ilmoitettu teräksestä valmistetuille roottoreille. Muista metalleista (kupari, pronssi, alumiini) valmistettujen roottoreiden nimivälyksen ja anturien muuntokertoimet käyttäjän on määritettävä kokeellisesti suorittamalla kalibrointi.
Tallenna muutetut parametrit painamalla “OK”-painiketta. Uudet parametrit tallennetaan tiedostoon ja niitä käytetään myöhemmissä mittauksissa.
1.2 Roottorin säteittäisen heiton mittaaminen
Roottorin säteittäinen heitto voidaan mitata kosketuksettomilla antureilla läheisyysanturit kahdella tasolla kuvassa 3 esitetyn kaavion mukaisesti. Aikafunktion ja tarvittaessa roottorin heiton spektrin mittaamiseksi ja piirtämiseksi on suoritettava useita valmistelevia toimenpiteitä, joihin kuuluvat:
- - valitaan roottorin läpimittaiset osat, joissa mittaukset suoritetaan;
- asentaa kosketuksettomat lineaariset siirtymäanturit 5 ja 6 sekä vaihe kulmasensori 7 koneen alustalle erityislaitteiden (esim. magneettisten kolmijalkojen) avulla;
- kytke lineaariliikkeen lähestymisanturit liittimiin X1 ja X2 ja vaihekulma-anturi mittausyksikön liittimeen X3;
- - asetetaan nimellinen mittausväli ∆ roottorin pinnan ja anturielementin välille kullekin lineaarikooderille (teräksestä valmistetun roottorin osalta ∆ = 3,5 mm);
- aseta roottoriin vaihekulmasensorin 7 laukaisua varten tarvittava heijastinmerkki ja tarkista sensorin laukaisu;
- liitä mittauslaite tietokoneeseen.
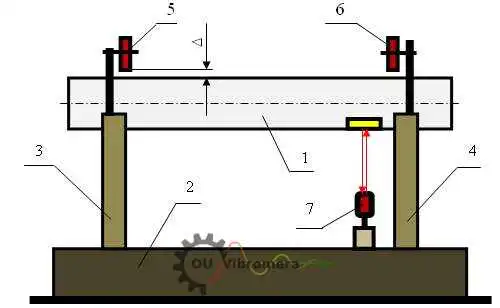
Kuva 3. Roottorin säteittäisen juoksun mittaus
Jos painat painiketta “F8 – Charts” päätyöikkunassa (ks. kuva 1), tietokoneen näytöllä näkyy työikkuna “Graphs” (ks. kuva 5), joka on suunniteltu erilaisten roottorin säteittäistä juoksua kuvaavien kaavioiden muodostamiseen.
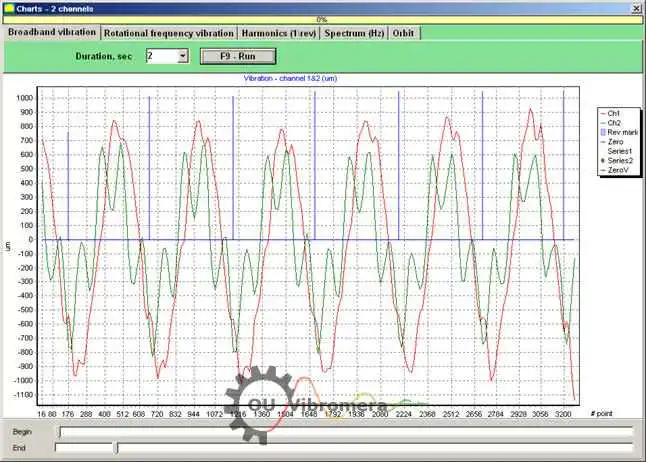
Kuva 5. “Charts”-tilan työikkuna
Tämän ikkunan painikkeilla luodaan seuraavat kaaviot:
- Kun painat “Broadband vibration” -painiketta tässä ikkunassa, näytetään roottorin säteittäisen juoksun aikafunktio.
- Jos “Rotation frequency vibration” -painiketta painetaan, näytetään roottorin säteittäisen juoksun pyörimistaajuisen komponentin aikafunktio.
- Jos painat painiketta “Harmonics (1/rev)”, näytössä näkyy roottorin juoksun hajotuskaavio harmoniseen sarjaan. Ensimmäinen harmoninen vastaa värähtelyn arvoa roottorin pyörimistaajuudella (1x), toinen – kaksinkertaisella taajuudella (2x) jne.
- Painamalla painiketta “Spectrum (Hz)” näyttö näyttää roottorin säteittäisen juoksun spektrin.
- Painamalla painiketta “Orbit” näytetään roottorin kiertoradan (presessointi) kuvaaja.
1.3 Roottorin liikeradan kuvaajan laatiminen
Roottorin kiertoradan kuvaaja voidaan rakentaa kuvassa 6 esitetyn kaavion mukaisesti.

Kuva 6. Roottorin kiertoradan mittauksen kaaviokuva 1a – roottori (päätykuva); 1b – roottori (sivukuva); 2, 3 – kosketuksettomat anturit; 4 – vaihekulma-anturin heijastusmerkki.
Mittauksen suorittamiseksi ja vastaavan kuvaajan muodostamiseksi on suoritettava useita valmistelevia toimenpiteitä, kuten:
- - asennetaan kosketuksettomat lineaariset kooderit 2 ja 3 jompaankumpaan roottorin läpimittaiseen osaan 90°:n kulmassa toisiinsa nähden edellyttäen, että kooderin 2 mittausakselin on oltava sama kuin X-akseli ja kooderin 3 mittausakselin on oltava sama kuin Y-akseli;
- aseta nimellinen mittausrako ∆x (∆y) roottorin pinnan ja kunkin lineaarisen anturin tuntoelimen väliin (teräkselle ∆ = 3.5 mm);
- - Aseta vaihekulma-anturi (ei kuvassa) X-Z-tasolle, joka on sama kuin kosketuksettoman anturin 2 asennustaso;
- aseta heijastinmerkki 4 roottoriin 1 X–Z-tasoon, mikä on välttämätöntä vaihekulma-anturin toiminnalle;
- - kytke kosketuksettomat lineaariset kooderit 2 ja 3 liittimiin X1 ja X2 ja vaihekulma-anturi mittausyksikön liittimeen X3;
- liitä mittauslaite tietokoneeseen.
Aloita roottorin kiertoradan mittaaminen päätyöikkunassa (ks. kuva 1) painamalla painiketta “F8 – Kaaviot” ja siirtymällä työikkunaan “Kaaviot” (ks. kuva 5), joka on tarkoitettu erilaisten roottorin säteittäisen heiton kaavioiden luomiseen. Tässä työikkunassa on painettava painiketta “Orbit”, minkä jälkeen tietokoneen näytölle avautuu työikkuna, jossa suoritetaan tarvittava mittaussykli (ks. kuva 7).

Kuva 7. Roottorin kiertoradan kuvaaja. Balanset-ohjelmisto.
Jatkaaksesi työtä määritetyssä työikkunassa (ks. kuva 7) sinun on käynnistettävä roottorin pyörintä ja painamalla painiketta “F9 – RUN” mitattava roottorin säteisheiton hetkelliset arvot Sxi ja Syi ajanjaksolta, joka vastaa yhtä roottorin kierrosta.
Mittauksen aikana saatuja hetkellisten arvojen Sxi ja Syi taulukoita käytetään valvotun roottorin radan piirtämiseen (radan jokaisella i:nnellä pisteellä on koordinaatit Sxi, Syi). Hetkellinen säteissiirtymän suuruus lasketaan kaavalla:
S∑i = √ (Sxi² + Syi²) (1)
missä S∑i on säteissiirtymän suuruuden hetkellinen arvo (roottorin ratavektorin pituus), laskettuna kuvaajan i:nnelle pisteelle;
- Sxi – roottorin säteisheiton hetkellinen arvo, mitattu X-akselin suunnassa anturilla 2 (ks. kuva 6) i:nnellä pisteellä;
- Syi – roottorin säteisheiton hetkellinen arvo, mitattu Y-akselin suunnassa anturilla 3 (ks. kuva 6) i:nnellä pisteellä.