Dengan Balanset-1A, Anda dapat mengukur getaran relatif rotor menggunakan encoder linier non-kontak.
1.1 Pemilihan jenis dan pengaturan sensor.
Tergantung pada tugasnya, sensor getaran atau sensor perpindahan dapat digunakan untuk pengukuran.
Untuk memilih jenis sensor, Anda harus memberi tanda pada panel "Jenis sensor" (di bagian bawah jendela utama) untuk memberi tanda pada bidang "Vibro" atau "Linear".
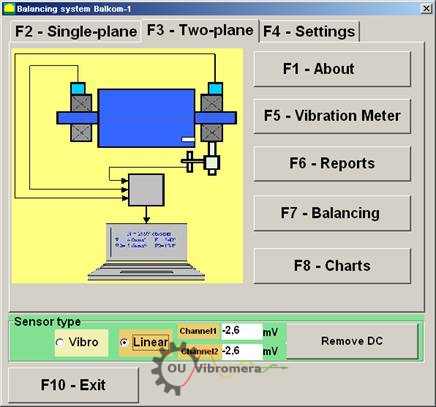
Gbr. 1. Jendela kerja utama program Balanset.T
Sebelum memulai pengukuran, penting untuk memastikan bahwa koefisien konversi sensor ditetapkan dengan benar. Untuk tujuan ini, tekan tombol "F4-Settings" di jendela kerja utama program (lihat Gbr. 1) dan masuk ke jendela pengaturan yang dirancang untuk memasukkan koefisien konversi (lihat Gbr. 2).
Pada jendela kerja yang ditunjukkan pada Gbr. 2, di bidang yang sesuai, koefisien konversi sensor linier dan getaran harus dimasukkan. Koefisien ini ditentukan dalam paspor instrumen. Biasanya Anda tidak perlu mengubahnya.
Untuk sensor perpindahan linear yang digunakan dalam rangkaian instrumen Balanset-1A, koefisien konversi masing-masing sama dengan:
Kprl1= 0,94 mV/μm (koefisien konversi sensor saluran pertama);
Kprl2 = 0,94 mV/μm (koefisien konversi sensor saluran ke-2.
Untuk pengoperasian yang tepat, linear encoder harus dipasang pada jarak tertentu dari permukaan objek pengukuran. Jarak nominal antara permukaan dan ujung sensor adalah 3,5 mm. Dalam hal ini terdapat tegangan konstan 2,48 volt pada output sensor. Tegangan ini akan ditampilkan di bidang "Channel1" dan "Channel2" untuk saluran pertama dan kedua.
Untuk mengimbanginya, Anda harus menekan tombol "Hapus DC". Sisa offset yang kecil tidak akan mengganggu pengukuran.
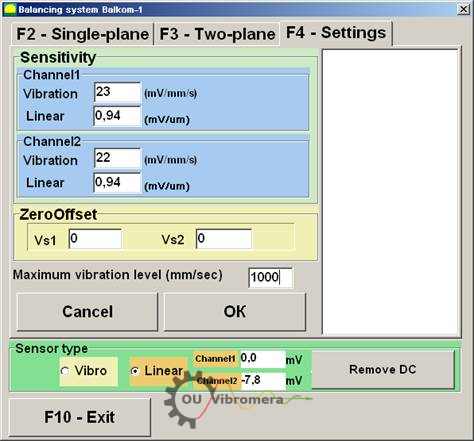
Gbr. 2. Jendela kerja untuk memasukkan koefisien konversi dan memilih jenis sensor yang digunakan
Perhatian!
Nilai yang ditentukan untuk jarak bebas nominal dan faktor konversi dari encoder linier diberikan untuk rotor yang terbuat dari baja.
Untuk rotor yang terbuat dari logam lain (tembaga, perunggu, aluminium), jarak bebas nominal dan koefisien konversi sensor harus ditentukan secara eksperimental oleh pengguna dengan melakukan kalibrasi.
Untuk menyimpan parameter yang telah diubah, tekan tombol "OK". Parameter baru akan disimpan dalam file dan digunakan untuk pengukuran selanjutnya.
1.2 Mengukur run-out radial rotor.
Run-out radial rotor dapat diukur dengan probe non-kontak dalam dua bidang sesuai dengan skema yang ditunjukkan pada gbr. 3.
Untuk mengukur dan memplot fungsi waktu dan spektrum run-out rotor, jika perlu, sejumlah operasi persiapan harus dilakukan, termasuk:
- pilih bagian rotor yang diametral, di mana pengukuran akan dilakukan;
- untuk memasang sensor perpindahan linier non-kontak 5 dan 6 serta sensor sudut fasa 7 pada alas mesin dengan menggunakan perangkat khusus (mis. tripod magnetik);
- sambungkan sensor jarak dari gerakan linier ke konektor X1 dan X2, dan sensor sudut fase ke konektor X3 pada unit pengukur;
- atur celah pengukuran nominal ∆ antara permukaan rotor dan elemen penginderaan untuk setiap enkoder linier (untuk rotor yang terbuat dari baja ∆ = 3,5 mm);
- tempatkan pada rotor tanda reflektif yang diperlukan untuk pemicuan sensor sudut fase 7 dan periksa pemicuan sensor;
- sambungkan unit pengukur ke komputer.
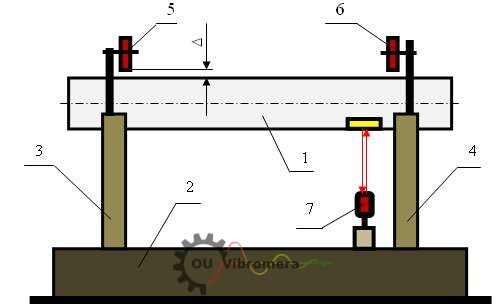
Gbr. 3. Mengukur run-out radial rotor
Jika Anda menekan tombol "F8 - Grafik" di jendela kerja utama (lihat Gbr. 1), layar komputer akan menampilkan jendela kerja "Grafik" (lihat Gbr. 5), yang dirancang untuk membuat berbagai jenis grafik run-out radial rotor.
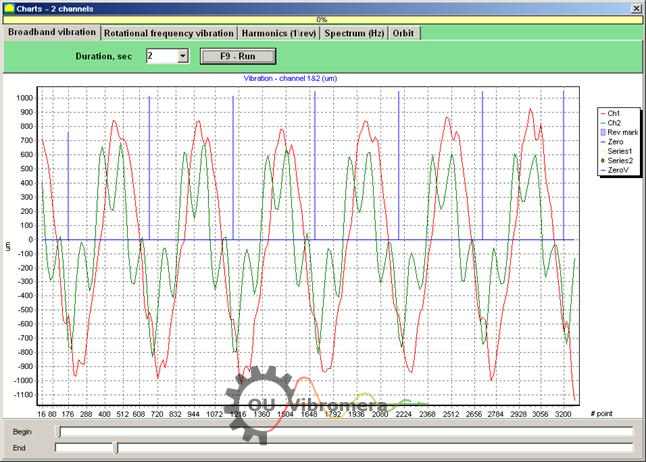
Gbr. 5. Jendela kerja mode "Grafik"
Saat Anda menekan tombol "Getaran broadband" di jendela ini, fungsi waktu runout radial rotor ditampilkan.
Jika tombol "Getaran frekuensi rotasi" ditekan, fungsi waktu dari komponen resiprokal runout radial rotor ditampilkan.
Jika Anda menekan tombol "Harmonics (1/rev)", layar akan menampilkan grafik penguraian runout rotor menjadi deret harmonik. Harmonik pertama sesuai dengan nilai getaran pada frekuensi rotor terbalik (1x), yang kedua - pada frekuensi ganda (2x), dst.
Dengan menekan tombol "Spektrum (Hz)", layar akan menampilkan spektrum run-out radial rotor.
Dengan menekan tombol "Orbit", grafik orbit rotor (presesi) akan ditampilkan.
1.3 Konstruksi grafik orbit rotor.
Konstruksi grafik orbit rotor dapat dilakukan sesuai dengan skema yang ditunjukkan pada Gbr. 6.

Gbr. 6. Skema pengukuran orbit rotor 1a - rotor (tampilan ujung); 1b - rotor (tampilan samping); 2, 3 - sensor non-kontak; 4 - tanda pantulan sensor sudut fase.
Untuk membuat pengukuran dan membuat grafik yang sesuai, perlu dilakukan sejumlah operasi persiapan, termasuk:
- pasang encoder linier non-kontak 2 dan 3 di salah satu bagian diametris rotor pada sudut 90 ° satu sama lain, asalkan sumbu pengukuran encoder 2 harus bertepatan dengan sumbu X, dan sumbu pengukuran encoder 3 harus bertepatan dengan sumbu Y;
- atur celah pengukuran nominal ∆x (∆u) antara permukaan rotor dan elemen penginderaan setiap encoder linier (untuk baja ∆ = 3,5 mm);
- atur sensor sudut fase (tidak ditunjukkan dalam skema) pada bidang X - Z, bertepatan dengan bidang pemasangan sensor non-kontak 2;
- tetapkan tanda reflektif 4 pada rotor 1 pada bidang X - Z, yang diperlukan untuk pengoperasian sensor sudut fase;
- sambungkan enkoder linier non-kontak 2 dan 3 ke konektor X1 dan X2, dan enkoder sudut fasa ke konektor X3 pada unit pengukur;
- sambungkan unit pengukur ke komputer.
Untuk mulai mengukur orbit rotor di jendela kerja utama (lihat Gbr. 1)
Tekan tombol "F8 - Charts" dan masuk ke jendela kerja "Graphs" (lihat Gbr. 5), yang didesain untuk membuat berbagai macam grafik runout radial rotor.
Di jendela kerja ini, Anda harus menekan tombol "Orbit", setelah itu jendela kerja muncul di layar komputer, di mana siklus pengukuran yang diperlukan dilakukan (lihat Gbr. 7).
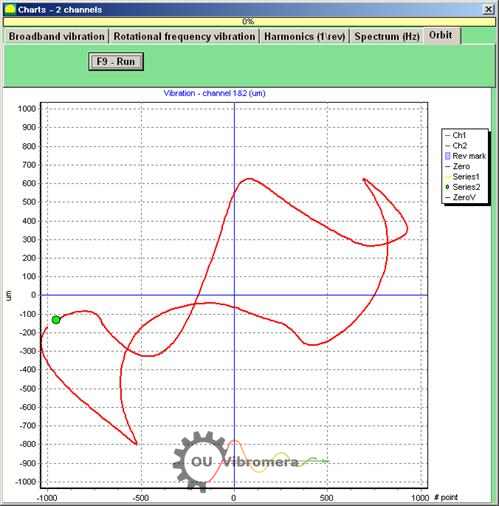
Gbr.7. Grafik orbit rotor. Perangkat lunak Balanset.
Untuk melanjutkan pekerjaan dalam jendela kerja yang ditentukan (lihat Gbr. 7), Anda harus menghidupkan rotasi rotor dan dengan menekan tombol "F9 - RUN" melakukan pengukuran nilai sesaat dari run-out radial rotor Sxi dan Sui untuk periode yang sama dengan satu putaran rotor.
Array nilai sesaat Sxi dan Sui yang diperoleh selama pengukuran digunakan untuk menghitung koordinat orbit rotor terkontrol, yang dilakukan dengan rumus:
S∑i = √ (Sxi² + Syi²) (1)
di mana S∑i adalah nilai sesaat dari koordinat orbit rotor, dihitung untuk titik ke-i pada grafik;
Sxi - nilai sesaat dari run-out radial rotor, diukur dengan koordinat X dengan sensor 1 di titik ke-i;
Sxi - nilai sesaat dari run-out radial rotor, diukur dengan koordinat Y dengan sensor 2 di titik ke-i.
