비접촉식 선형 변위 센서를 이용한 로터 상대 진동 측정
와 함께 발란셋-1A 상대적인 값을 측정할 수 있습니다 진동 의 로터 비접촉식 리니어 인코더를 사용하여.
1.1 센서 유형 선택 및 설정
작업에 따라 진동 센서나 변위 센서를 사용하여 측정할 수 있습니다. 센서 유형을 선택하려면 “센서 유형” 패널(메인 창 하단)에서 “Vibro” 또는 “Linear” 필드에 체크 표시를 해야 합니다.
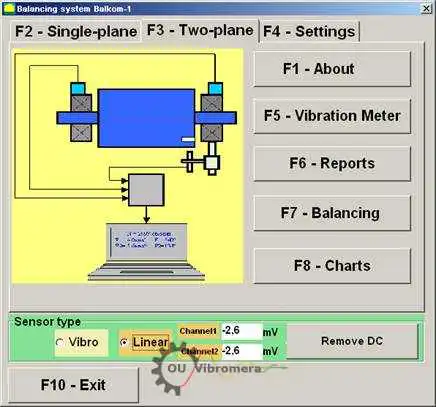
그림 1. Balanset 프로그램의 기본 작업 창.T
측정을 시작하기 전에 센서의 변환 계수가 올바르게 설정되어 있는지 확인해야 합니다. 이를 위해 프로그램의 기본 작업 창(그림 1 참조)에서 "F4-설정" 버튼을 누르고 변환 계수를 입력하도록 설계된 설정 창으로 이동합니다(그림 2 참조).
그림 2에 표시된 작업 창에서 해당 필드에 선형 및 진동 센서의 변환 계수를 입력해야 합니다. 이 계수는 계기 여권에 명시되어 있습니다. 일반적으로 변경할 필요가 없습니다.
선형의 경우 배수량 Balanset-1A 계측기 세트에 사용된 센서의 경우, 변환 계수는 각각 다음과 같습니다:
- Kprl1= 0.94mV/μm(1채널 센서의 변환 계수);
- Kprl2 = 0.94mV/μm(두 번째 채널 센서의 변환 계수).
올바른 작동을 위해 선형 인코더는 측정 대상 표면에서 일정 거리를 두고 설치해야 합니다. 표면과 센서 끝 사이의 공칭 간격은 3.5mm입니다. 이 경우 센서 출력에 2.48볼트의 정전압이 있습니다. 이 전압은 첫 번째 및 두 번째 채널에 대해 각각 "채널1" 및 "채널2" 필드에 표시됩니다.
이를 보정하려면 "DC 제거" 버튼을 눌러야 합니다. 작은 잔여 오프셋은 측정에 방해가 되지 않습니다.
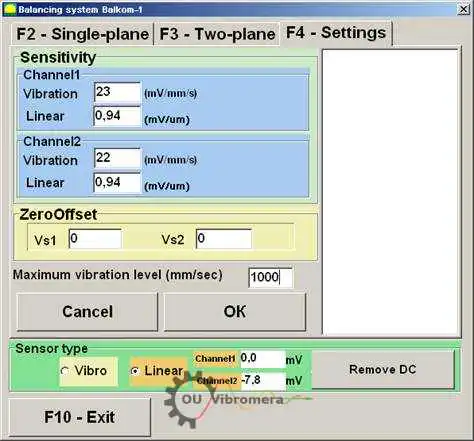
그림 2. 변환 계수 입력 및 사용 센서 유형 선택을 위한 작업 창
주목! 명목 공차 및 리니어 엔코더의 변환 계수는 강철로 제작된 로터에 대해 제시된 값입니다. 다른 금속(구리, 청동, 알루미늄)으로 제작된 로터의 경우, 명목 공차 및 센서 변환 계수는 사용자가 직접 교정을 실시하여 실험적으로 결정해야 합니다.
변경된 파라미터를 저장하려면 "확인" 버튼을 누릅니다. 새 매개변수는 파일에 저장되어 추후 측정에 사용됩니다.
1.2 로터의 반경 방향 편심 측정
로터의 반경 방향 편심은 비접촉 방식으로 측정할 수 있습니다 근접 프로브 그림 3에 표시된 방식에 따라 두 평면에서 수행합니다. 시간 함수와 로터 편심 스펙트럼을 측정하고 그래프로 작성하기 위해서는, 필요한 경우 다음과 같은 여러 가지 사전 작업을 수행해야 합니다:
- - 측정이 수행될 로터의 직경 섹션을 선택합니다;
- 비접촉식 선형 변위 센서 5와 6을 설치하고 단계 특수 장치(예: 자석 삼각대)를 사용하여 기계 베드에 각도 센서 7을 설치하고;
- 선형 운동 근접 센서를 측정 장치의 커넥터 X1 및 X2에 연결하고, 위상각 센서를 커넥터 X3에 연결하십시오;
- - 각 선형 인코더의 로터 표면과 감지 요소 사이에 공칭 측정 간격 ∆을 설정합니다(강철로 만들어진 로터의 경우 ∆ = 3.5mm);
- 로터에 위상각 센서 7의 트리거링에 필요한 반사 마크를 부착하고 센서 트리거링을 확인하십시오;
- 측정 장치를 컴퓨터에 연결하십시오.
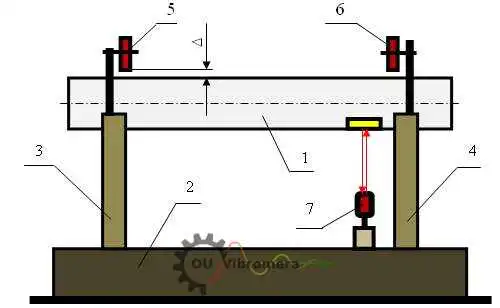
그림 3. 로터의 방사형 런아웃 측정
기본 작업 창(그림 1 참조)에서 "F8 - 차트" 버튼을 누르면 컴퓨터 디스플레이에 로터의 방사형 런아웃에 대한 다양한 종류의 그래프를 작성하도록 설계된 "그래프"(그림 5 참조) 작업 창이 표시됩니다.
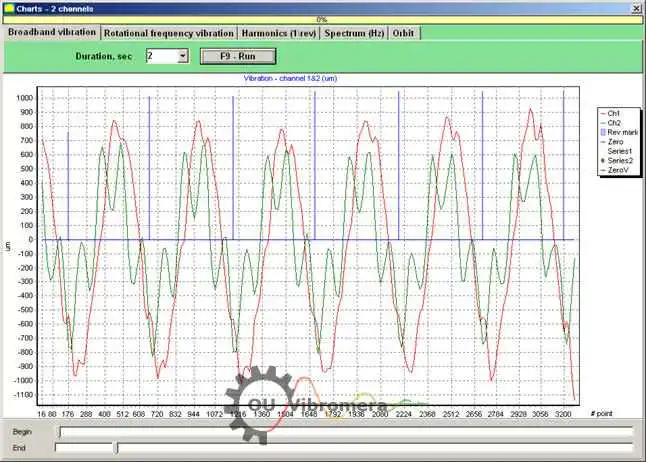
그림 5. "차트" 모드의 작업 창
이 창의 버튼을 사용하면 다음과 같은 그래프를 생성할 수 있습니다:
- 이 창에서 "광대역 진동" 버튼을 누르면 로터 방사형 런아웃의 시간 기능이 표시됩니다.
- "회전 주파수 진동" 버튼을 누르면 로터 방사형 런아웃의 역성분 시간 함수가 표시됩니다.
- "고조파(1/rev)" 버튼을 누르면 디스플레이에 로터 런아웃이 고조파 계열로 분해된 그래프가 표시됩니다. 첫 번째 고조파는 역방향 로터 주파수(1x)에서의 진동 값, 두 번째 고조파는 이중 주파수(2x) 등에서 진동 값에 해당합니다.
- "스펙트럼(Hz)" 버튼을 누르면 디스플레이에 로터의 방사형 런아웃 스펙트럼이 표시됩니다.
- "궤도" 버튼을 누르면 로터 궤도(프리세션) 그래프가 표시됩니다.
1.3 로터 궤적 그래프 작성
로터 궤도 그래프의 구성은 그림 6에 표시된 방식에 따라 수행할 수 있습니다.

그림 6. 로터 궤도 측정 방식 1a - 로터(단면도), 1b - 로터(측면도), 2, 3 - 비접촉 센서, 4 - 위상각 센서의 반사 표시.
측정을 하고 해당 그래프를 작성하려면 다음과 같은 여러 가지 준비 작업을 수행해야 합니다:
- - 인코더 2의 측정 축이 X축과 일치하고 인코더 3의 측정 축이 Y축과 일치해야 한다는 조건 하에 로터의 직경 섹션 중 하나에 비접촉식 리니어 인코더 2 및 3을 서로 90° 각도로 설치합니다;
- 각 리니어 엔코더의 로터 표면과 감지 소자 사이의 공칭 측정 간극 ∆x (∆u)를 설정합니다(강재의 경우 ∆ = 3.5 mm);
- - 비접촉 센서 2의 설치 평면과 일치하는 X-Z 평면에 위상각 센서(도식에는 표시되지 않음)를 설정합니다;
- 위상각 센서의 작동에 필요한 반사 마크 4를 X–Z 평면상의 로터 1에 표시하고;
- - 비접촉식 리니어 엔코더 2와 3을 커넥터 X1 및 X2에 연결하고 위상각 엔코더를 측정 장치의 커넥터 X3에 연결합니다;
- 측정 장치를 컴퓨터에 연결하십시오.
메인 작업 창(그림 1 참조)에서 로터 궤도 측정을 시작하려면 “F8 – Charts” 버튼을 눌러 로터의 반경 방향 편심에 대한 다양한 그래프를 생성하도록 설계된 “Graphs” 작업 창(그림 5 참조)으로 이동하십시오. 이 작업 창에서 “Orbit” 버튼을 누르면, 컴퓨터 화면에 필요한 측정 주기를 수행하는 작업 창이 나타납니다(그림 7 참조).

그림 7. 로터 궤도 그래프. 발란셋 소프트웨어.
지정된 작업 창(그림 7 참조)에서 작업을 계속하려면 로터 회전을 켜고 "F9 - RUN" 버튼을 눌러 한 번의 로터 회전과 동일한 기간 동안 로터 Sxi 및 Sui의 방사형 런아웃의 순간값을 측정해야 합니다.
측정 중에 얻은 순간 값 Sxi 및 Sui의 배열은 공식에 의해 수행되는 제어 로터의 궤도 좌표를 계산하는 데 사용됩니다:
S∑i = √(Sxi² + Syi²) (1)
여기서 S∑i는 그래프의 i번째 지점에 대해 계산된 로터 궤도 좌표의 순간 값입니다;
- Sxi - 로터의 방사형 런아웃의 순간 값으로, i번째 지점에서 센서 1의 좌표 X로 측정합니다;
- Sxi - 로터 방사형 런아웃의 순간 값으로, i번째 지점에서 센서 2를 사용하여 좌표 Y로 측정합니다.
