Измерение относительной вибрации ротора с помощью бесконтактных датчиков линейного перемещения
С Balanset-1A вы можете измерить относительную вибрация из ротор с использованием бесконтактных линейных энкодеров.
1.1 Выбор типа датчика и настройка
В зависимости от поставленной задачи для измерений можно использовать либо датчики вибрации, либо датчики перемещения. Чтобы выбрать тип датчика, необходимо на панели «Тип датчика» (в нижней части главного окна) поставить галочку в поле «Вибро» или «Линейный».
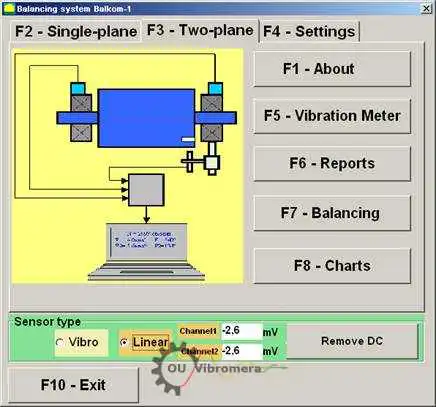
Рис. 1. Главное рабочее окно программы Balanset.
Перед началом измерений необходимо убедиться, что коэффициенты пересчета датчиков установлены правильно. Для этого в главном рабочем окне программы нажмите кнопку "F4-Настройки" (см. рис. 1) и перейдите в окно настроек, предназначенное для ввода коэффициентов пересчета (см. рис. 2).
В рабочем окне, показанном на рис. 2, в соответствующих полях необходимо ввести коэффициенты преобразования линейных и вибрационных датчиков. Эти коэффициенты указаны в паспорте прибора. Обычно менять их не требуется.
Для линейного перемещение для датчиков, используемых в комплекте прибора «Балансет-1А», коэффициенты преобразования соответственно равны:
- Кпрл1= 0,94 мВ/мкм (коэффициент преобразования датчика 1-го канала);
- Кпрл2 = 0,94 мВ/мкм (коэффициент преобразования датчика 2-го канала.
Для правильной работы линейный энкодер должен быть установлен на определенном расстоянии от поверхности объекта измерения. Номинальный зазор между поверхностью и торцом датчика составляет 3,5 мм. В этом случае на выходе датчика будет постоянное напряжение 2,48 вольта. Это напряжение будет отображаться в полях "Канал1" и "Канал2" для первого и второго каналов соответственно.
Чтобы компенсировать его, необходимо нажать кнопку "Remove DC". Небольшое остаточное смещение не будет мешать измерениям.
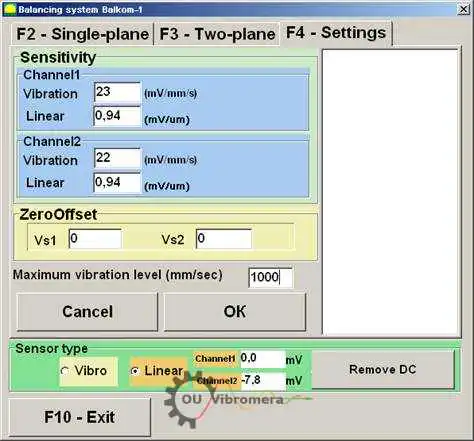
Рис. 2. Рабочее окно для ввода коэффициентов преобразования и выбора типа используемых датчиков
Внимание! Указанные значения номинального зазора и коэффициенты преобразования линейных датчиков приведены для роторов, изготовленных из стали. Для роторов, изготовленных из других металлов (меди, бронзы, алюминия), номинальный зазор и коэффициенты преобразования датчиков должны быть определены пользователем экспериментально путем проведения калибровки.
Для сохранения измененных параметров нажмите кнопку "OK". Новые параметры будут сохранены в файле и использованы для дальнейших измерений.
1.2 Измерение радиального биения ротора
Радиальное биение ротора можно измерить бесконтактным способом датчиков приближения в двух плоскостях в соответствии со схемой, представленной на рис. 3. Для измерения и построения графика зависимости от времени, а также спектра биения ротора (при необходимости) требуется выполнить ряд подготовительных операций, в том числе:
- - выберите диаметральные участки ротора, в которых будут проводиться измерения;
- установить бесконтактные линейные датчики перемещения 5 и 6 и фаза установить датчик угла 7 на станине станка с помощью специальных приспособлений (например, магнитных штативов);
- подключить датчики приближения линейного перемещения к разъемам X1 и X2, а датчик фазового угла — к разъему X3 измерительного блока;
- - установите номинальный измерительный зазор ∆ между поверхностью ротора и чувствительным элементом для каждого линейного энкодера (для ротора из стали ∆ = 3,5 мм);
- установить на роторе светоотражающую метку, необходимую для срабатывания датчика фазового угла 7, и проверить срабатывание датчика;
- подключите измерительный блок к компьютеру.
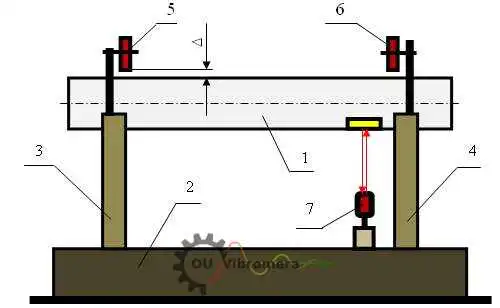
Рис. 3. Измерение радиального биения ротора
При нажатии кнопки "F8 - Графики" в главном рабочем окне (см. рис. 1) на дисплее компьютера появляется рабочее окно "Графики" (см. рис. 5), предназначенное для построения различных видов графиков радиального биения ротора.
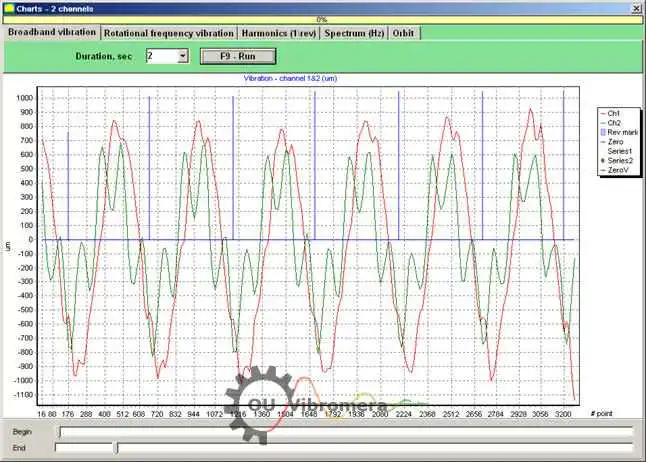
Рис. 5. Рабочее окно режима "Графики"
Кнопки в этом окне позволяют построить следующие графики:
- При нажатии кнопки "Широкополосная вибрация" в этом окне отображается временная функция радиального биения ротора.
- При нажатии кнопки "Вибрация частоты вращения" отображается временная функция взаимной составляющей радиального биения ротора.
- Если нажать кнопку "Гармоники (1/rev)", на дисплее появится график разложения биения ротора в гармонический ряд. Первая гармоника соответствует значению вибрации на частоте вращения ротора (1x), вторая - на двойной частоте (2x) и т.д.
- При нажатии кнопки "Спектр (Гц)" на дисплее отображается спектр радиального биения ротора.
- При нажатии кнопки "Орбита" отображается график орбиты (прецессии) ротора.
1.3 Построение графика орбиты ротора
Построение графика орбиты ротора может быть выполнено по схеме, показанной на рис. 6.

Рис. 6. Схема измерения орбиты ротора 1а - ротор (вид с торца); 1б - ротор (вид сбоку); 2, 3 - бесконтактные датчики; 4 - отражающая метка датчика фазового угла.
Для того чтобы произвести измерение и построить соответствующий график, необходимо выполнить ряд подготовительных операций, в том числе:
- - установить бесконтактные линейные энкодеры 2 и 3 в одной из диаметральных секций ротора под углом 90° друг к другу, при этом измерительная ось энкодера 2 должна совпадать с осью X, а измерительная ось энкодера 3 должна совпадать с осью Y;
- установите номинальный измерительный зазор ∆x (∆y) между поверхностью ротора и чувствительным элементом каждого линейного энкодера (для стали ∆ = 3.5 mm);
- - установите датчик фазового угла (на схеме не показан) в плоскости X - Z, совпадающей с плоскостью установки бесконтактного датчика 2;
- нанести на роторе 1 в плоскости X–Z отражающую метку 4, необходимую для работы датчика фазового угла;
- - подключите бесконтактные линейные энкодеры 2 и 3 к разъемам X1 и X2, а энкодер фазового угла - к разъему X3 измерительного блока;
- подключите измерительный блок к компьютеру.
Чтобы приступить к измерению орбиты ротора в основном рабочем окне (см. рис. 1), нажмите кнопку «F8 – Графики» и перейдите в рабочее окно «Графики» (см. рис. 5), предназначенное для построения различных видов графиков радиального биения ротора. В этом рабочем окне необходимо нажать кнопку «Orbit», после чего на экране компьютера появится рабочее окно, в котором выполняется необходимый цикл измерений (см. рис. 7).

Рис.7. График орбиты ротора. Программное обеспечение Balanset.
Чтобы продолжить работу в указанном рабочем окне (см. Fig. 7), необходимо включить вращение ротора и, нажав кнопку “F9 – RUN”, выполнить измерение мгновенных значений радиального биения ротора Sxi и Syi за период, равный одному обороту ротора.
Массив мгновенных значений Sxi и Syi, полученных при измерении, используется для построения орбиты контролируемого ротора (каждая i-я точка орбиты имеет координаты Sxi, Syi). Мгновенная величина радиального смещения рассчитывается по формуле:
S∑i = √ (Sxi² + Syi²) (1)
где S∑i — мгновенное значение величины радиального смещения (длина радиус-вектора орбиты ротора), рассчитанное для i-й точки графика;
- Sxi – мгновенное значение радиального биения ротора, измеренное по оси X датчиком 2 (см. Fig. 6) в i-й точке;
- Syi – мгновенное значение радиального биения ротора, измеренное по оси Y датчиком 3 (см. Fig. 6) в i-й точке.