Z napravo Balanset-1A lahko merite relativne vibracije rotorja z brezkontaktnimi linearnimi kodirniki.
1.1 Izbira vrste senzorja in nastavitev.
Odvisno od naloge se lahko za meritve uporabljajo senzorji vibracij ali senzorji premikanja.
Za izbiro vrste senzorja je treba na plošči "Vrsta senzorja" (na dnu glavnega okna) označiti polje "Vibro" ali "Linearno".
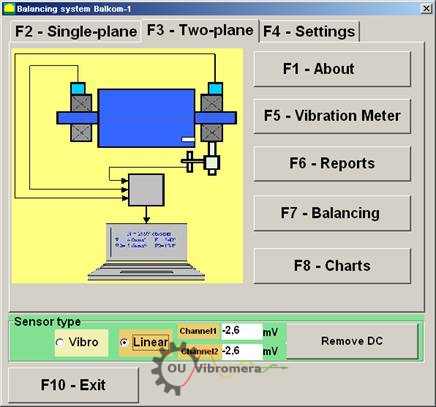
Slika 1. Glavno delovno okno programa Balanset.
Pred začetkom merjenja se je treba prepričati, da so pretvorbeni koeficienti senzorjev pravilno nastavljeni. V ta namen v glavnem delovnem oknu programa pritisnite gumb "F4-Settings" (glejte sliko 1) in pojdite v okno nastavitev, namenjeno vnosu pretvorbenih koeficientov (glejte sliko 2).
V delovnem oknu, prikazanem na sliki 2, je treba v ustrezna polja vnesti pretvorbene koeficiente linearnih in vibracijskih senzorjev. Ti koeficienti so določeni v potnem listu instrumenta. Običajno jih ni treba spreminjati.
Za linearne senzorje pomika, ki se uporabljajo v kompletu instrumenta Balanset-1A, so pretvorbeni koeficienti enaki:
Kprl1= 0,94 mV/μm (pretvorbeni koeficient senzorja prvega kanala);
Kprl2 = 0,94 mV/μm (pretvorbeni koeficient senzorja 2. kanala.
Za pravilno delovanje mora biti linearni enkoder nameščen na določeni razdalji od površine predmeta merjenja. Nominalna razdalja med površino in koncem senzorja je 3,5 mm. V tem primeru je na izhodu senzorja konstantna napetost 2,48 volta. Ta napetost bo prikazana v poljih "Channel1" in "Channel2" za prvi oziroma drugi kanal.
Če ga želite nadomestiti, morate pritisniti gumb "Remove DC". Majhen preostali odmik ne bo oviral meritve.
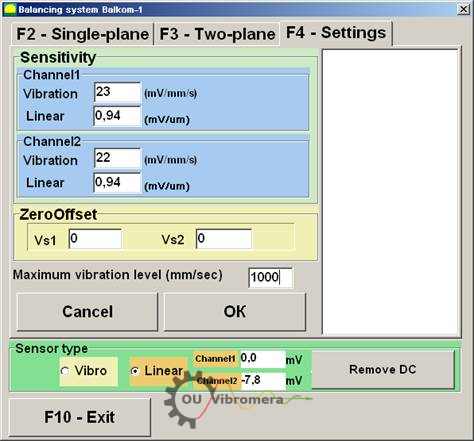
Slika 2. Delovno okno za vnos pretvorbenih koeficientov in izbiro vrste uporabljenih senzorjev
Pozor!
Določene vrednosti nazivne zračnosti in pretvorbeni faktorji linearnih kodirnikov so podani za rotorje iz jekla.
Pri rotorjih iz drugih kovin (baker, bron, aluminij) mora nazivno zračnost in pretvorbene koeficiente senzorjev določiti uporabnik eksperimentalno z umerjanjem.
Če želite shraniti spremenjene parametre, pritisnite gumb "OK". Novi parametri bodo shranjeni v datoteko in uporabljeni pri nadaljnjih meritvah.
1.2 Merjenje radialnega uklona rotorja.
Radialni hod rotorja se lahko meri z brezkontaktnimi sondami v dveh ravninah v skladu s shemo, prikazano na sliki 3.
Za merjenje in izris časovne funkcije in spektra bega rotorja je treba po potrebi izvesti več pripravljalnih postopkov, med drugim:
- izberete premerne dele rotorja, na katerih se bodo izvajale meritve;
- za namestitev brezkontaktnih linearnih senzorjev pomika 5 in 6 ter senzorja faznega kota 7 na posteljo stroja s pomočjo posebnih naprav (npr. magnetnih stativov);
- priključite senzorje bližine linearnega gibanja na priključka X1 in X2 ter senzor faznega kota na priključek X3 merilne enote;
- za vsak linearni enkoder določite nazivno merilno vrzel ∆ med površino rotorja in senzorskim elementom (za rotor iz jekla ∆ = 3,5 mm);
- na rotor namestite odsevno oznako, potrebno za sprožitev senzorja faznega kota 7, in preverite sprožitev senzorja;
- povežite merilno enoto z računalnikom.
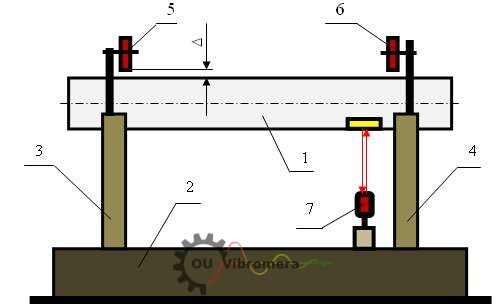
Slika 3. Merjenje radialnega uklona rotorja
Če v glavnem delovnem oknu (glejte sliko 1) pritisnete gumb "F8 - Diagrami", se na zaslonu računalnika prikaže delovno okno "Diagrami" (glejte sliko 5), namenjeno izdelavi različnih vrst grafov radialnega bega rotorja.
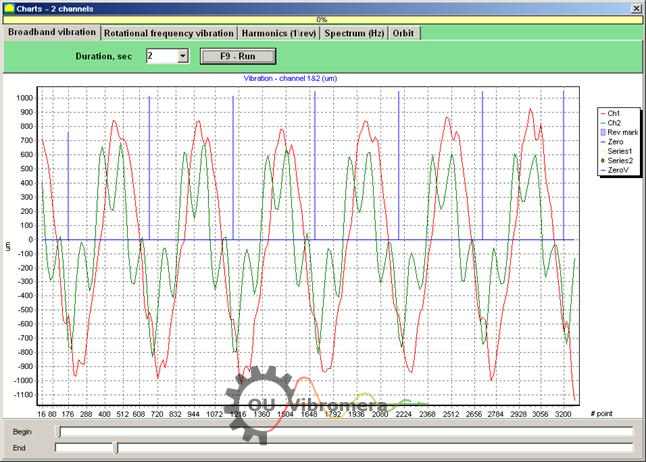
Slika 5. Delovno okno načina "Diagrami"
Ko v tem oknu pritisnete gumb "Širokopasovne vibracije", se prikaže časovna funkcija radialnega bega rotorja.
Če pritisnete gumb "Vibracija frekvence vrtenja", se prikaže časovna funkcija recipročne komponente radialnega bega rotorja.
Če pritisnete gumb "Harmonics (1/rev)", se na zaslonu prikaže graf razgradnje bega rotorja v harmonsko vrsto. Prva harmonika ustreza vrednosti nihanja pri obratni frekvenci rotorja (1x), druga pri dvojni frekvenci (2x) itd.
S pritiskom na gumb "Spekter (Hz)" se na zaslonu prikaže spekter radialnega bega rotorja.
S pritiskom na gumb "Orbit" se prikaže graf orbite rotorja (precesije).
1.3 Konstrukcija grafa rotorske orbite.
Graf orbite rotorja lahko sestavite po shemi, prikazani na sliki 6.

Slika 6. Shema merjenja orbite rotorja 1a - rotor (končni pogled); 1b - rotor (stranski pogled); 2, 3 - brezkontaktni senzorji; 4 - oznaka odseva senzorja faznega kota.
Za izvedbo meritve in izdelavo ustreznega grafa je treba izvesti več pripravljalnih postopkov, med drugim:
- brezkontaktna linearna kodirnika 2 in 3 namestite v enega od premernih delov rotorja pod medsebojnim kotom 90°, pri čemer mora merilna os kodirnika 2 sovpadati z osjo X, merilna os kodirnika 3 pa mora sovpadati z osjo Y;
- nastavite nazivno merilno vrzel ∆x (∆u) med površino rotorja in senzorskim elementom vsakega linearnega enkoderja (za jeklo ∆ = 3,5 mm);
- postavite senzor faznega kota (ni prikazan na shemi) v ravnino X-Z, ki sovpada z ravnino namestitve brezkontaktnega senzorja 2;
- na rotorju 1 v ravnini X-Z nastavite odsevno oznako 4, ki je potrebna za delovanje senzorja faznega kota;
- brezkontaktna linearna enkoderja 2 in 3 priključite na priključka X1 in X2, enkoder faznega kota pa na priključek X3 merilne enote;
- povežite merilno enoto z računalnikom.
Začetek merjenja orbite rotorja v glavnem delovnem oknu (glejte sliko 1)
Pritisnite gumb "F8 - Diagrami" in pojdite v delovno okno "Grafi" (glejte sliko 5), ki je namenjeno izdelavi različnih vrst grafov radialnega bega rotorja.
V tem delovnem oknu je treba pritisniti gumb "Orbit", nakar se na zaslonu računalnika prikaže delovno okno, v katerem se izvede potreben cikel meritev (glej sliko 7).
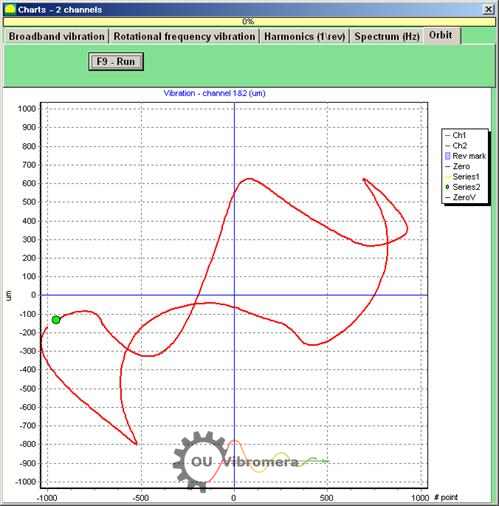
Slika 7. Graf orbite rotorja. Programska oprema Balanset.
Za nadaljevanje dela v določenem delovnem oknu (glejte sliko 7) morate vklopiti vrtenje rotorja in s pritiskom na gumb "F9 - RUN" izvesti meritev trenutnih vrednosti radialnega bega rotorja Sxi in Sui za obdobje, ki je enako enemu obratu rotorja.
Niz trenutnih vrednosti Sxi in Sui, pridobljenih med merjenjem, se uporabi za izračun koordinat orbite krmiljenega rotorja, ki se izvede po formuli:
S∑i = √ (Sxi² + Syi²) (1)
kjer je S∑i trenutna vrednost koordinate rotorske orbite, izračunana za i-to točko grafa;
Sxi - trenutna vrednost radialnega bega rotorja, izmerjena s koordinato X s senzorjem 1 v i-ti točki;
Sxi - trenutna vrednost radialnega bega rotorja, izmerjena s koordinato Y s senzorjem 2 v i-ti točki.
