Mätning av relativ rotorsvängning med hjälp av beröringsfria linjära förskjutningsgivare
With the Balanset-1A du kan mäta den relativa vibrationer av rotor med hjälp av beröringsfria linjära givare.
1.1 Val av sensortyp och inställning
Beroende på uppgiften kan antingen vibrationssensorer eller förskjutningssensorer användas för mätningarna. För att välja sensortyp måste man på panelen “Sensortyp” (längst ner i huvudfönstret) markera rutan “Vibro” eller “Lineär”.
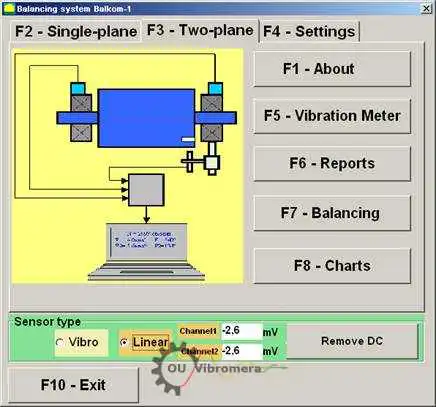
Fig. 1. Det huvudsakliga arbetsfönstret i Balanset-programmet.
Innan mätningen påbörjas är det nödvändigt att kontrollera att omvandlingskoefficienterna för givarna är korrekt inställda. Tryck därför på knappen "F4-Settings" i programmets huvudarbetsfönster (se Fig. 1) och gå till inställningsfönstret för inmatning av omvandlingskoefficienter (se Fig. 2).
I det arbetsfönster som visas i fig. 2 skall omvandlingskoefficienterna för linjär- och vibrationsgivare anges i motsvarande fält. Dessa koefficienter anges i instrumentpasset. Vanligtvis behöver du inte ändra dem.
For the linear förflyttning För de sensorer som används i Balanset-1A-instrumentet är omräkningskoefficienterna följande:
- Kprl1= 0,94 mV/μm (omvandlingskoefficient för sensorn i den 1:a kanalen);
- Kprl2 = 0,94 mV/μm (omvandlingskoefficient för sensorn i den 2:a kanalen.
För korrekt funktion måste linjärgivaren installeras på ett visst avstånd från mätobjektets yta. Det nominella avståndet mellan ytan och givarens ände är 3,5 mm. I detta fall finns det en konstant spänning på 2,48 volt vid givarens utgång. Denna spänning visas i fälten "Channel1" och "Channel2" för den första respektive andra kanalen.
För att kompensera detta måste du trycka på knappen "Remove DC". En liten kvarvarande offset kommer inte att störa mätningen.
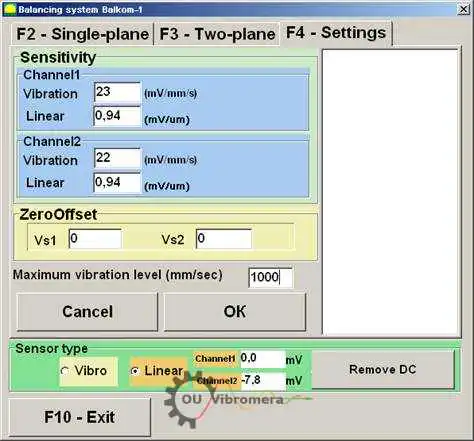
Fig. 2. Arbetsfönster för inmatning av omvandlingskoefficienter och val av typ av givare
Givakt! De angivna värdena för nominellt spel och omräkningsfaktorerna för linjära givare gäller för rotorer tillverkade av stål. För rotorer tillverkade av andra metaller (koppar, brons, aluminium) bör det nominella spelet och givarnas omräkningsfaktorer fastställas experimentellt av användaren genom kalibrering.
Tryck på "OK"-knappen för att spara de ändrade parametrarna. De nya parametrarna sparas i en fil och används för ytterligare mätningar.
1.2 Mätning av rotorns radiella kast
Rotorns radiella kast kan mätas beröringsfritt närhetsprober i två plan enligt det schema som visas i fig. 3. För att vid behov mäta och plotta tidsfunktionen och spektrumet för rotorns radiella kast måste ett antal förberedande åtgärder vidtas, bland annat:
- - välj diametrala sektioner av rotorn, i vilka mätningarna kommer att utföras;
- för att installera beröringsfria linjära lägesgivare 5 och 6 samt fas vinkelsensor 7 på maskinbädden med hjälp av specialutrustning (t.ex. magnetiska stativ);
- Anslut närhetssensorerna för linjär rörelse till anslutningarna X1 och X2, och fasvinkelsensorn till anslutning X3 på mätenheten;
- - Ange ett nominellt mätgap ∆ mellan rotorytan och avkänningselementet för varje linjärgivare (för en rotor av stål är ∆ = 3,5 mm);
- placera den reflekterande markeringen som krävs för att utlösa fasvinkelsensorn 7 på rotorn och kontrollera sensorns utlösning;
- Anslut mätarenheten till datorn.
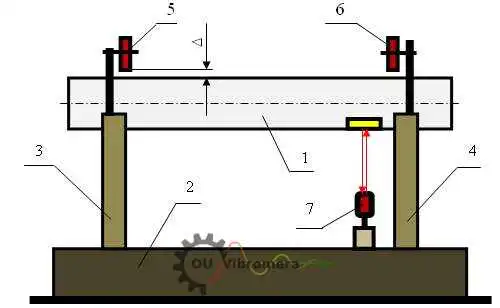
Fig. 3. Mätning av rotorns radiella kast
Om du trycker på knappen “F8 – Diagram” i huvudarbetsfönstret (se fig. 1), visas arbetsfönstret “Diagram” (se fig. 5), som är utformat för att skapa olika typer av diagram över rotorns radiella kast.
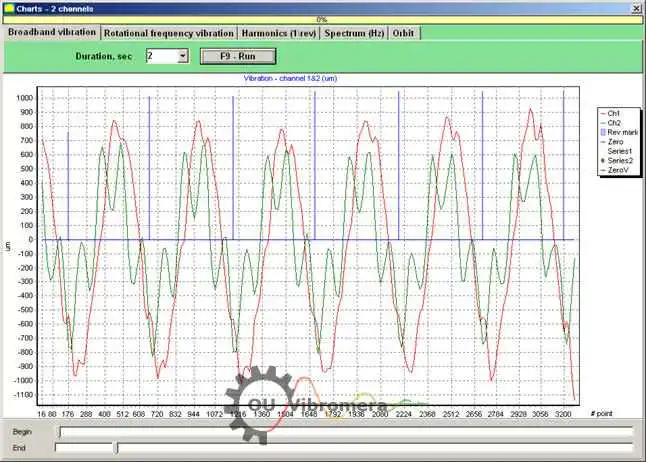
Fig. 5. Arbetsfönstret i läget "Diagram"
Knapparna i det här fönstret skapar följande diagram:
- När du trycker på knappen "Bredbandsvibration" i detta fönster visas tidsfunktionen för rotorns radiella kast.
- Om man trycker på knappen “Rotationsfrekvens vibration” visas tidsfunktionen för den reciproka komponenten av rotorns radiella kast.
- Om du trycker på knappen "Harmonics (1/rev)", kommer displayen att visa en nedbrytningsgraf av rotorkastet i en harmonisk serie. Den första övertonen motsvarar vibrationsvärdet vid den omvända rotorfrekvensen (1x), den andra - vid den dubbla frekvensen (2x), etc.
- Genom att trycka på knappen "Spectrum (Hz)" visar displayen spektrumet för rotorns radiella kast.
- Genom att trycka på knappen "Orbit" visas grafen för rotorns bana (precession).
1.3 Konstruktion av diagram över rotorbanan
Konstruktionen av rotorbanegrafen kan utföras enligt det schema som visas i fig. 6.

Fig. 6. Schema för mätning av rotorbanan 1a - rotor (ändvy); 1b - rotor (sidvy); 2, 3 - beröringsfria sensorer; 4 - reflektionsmärke för fasvinkelsensor.
För att kunna göra en mätning och skapa en motsvarande graf är det nödvändigt att utföra ett antal förberedande operationer, bl.a:
- - Montera de beröringsfria linjära kodarna 2 och 3 i en av rotorns diametriska sektioner i en vinkel på 90° mot varandra, förutsatt att kodare 2:s mätaxel måste sammanfalla med X-axeln och kodare 3:s mätaxel måste sammanfalla med Y-axeln;
- ställ in det nominella mätgapet ∆x (∆y) mellan rotorytan och mätelementet i varje linjärgivare (för stål ∆ = 3.5 mm);
- - Placera fasvinkelgivaren (visas inte i schemat) i X - Z-planet, som sammanfaller med installationsplanet för beröringsfri givare 2;
- placera en reflekterande markering 4 på rotorn 1 i X – Z-planet, vilket är nödvändigt för att fasvinkelsensorn ska fungera;
- - Anslut de beröringsfria linjärgivarna 2 och 3 till anslutningarna X1 och X2, och fasvinkelgivaren till anslutningen X3 på mätenheten;
- Anslut mätarenheten till datorn.
För att börja mäta rotorbanan i huvudarbetsfönstret (se fig. 1) trycker du på knappen “F8 – Diagram” och går till arbetsfönstret “Grafer” (se fig. 5), som är avsett för att skapa olika typer av grafer över rotorns radiella kast. I detta arbetsfönster måste du trycka på knappen “Orbit”, varefter arbetsfönstret visas på datorskärmen, där den nödvändiga mätcykeln utförs (se fig. 7).

Fig. 7. Graf över rotorns bana. Programvaran Balanset.
För att fortsätta arbetet i det angivna arbetsfönstret (se fig. 7) måste du slå på rotorrotationen och genom att trycka på knappen “F9 – RUN” utföra mätning av momentanvärdena för rotorns radiella kast Sxi och Syi under en period som är lika med ett rotorvarv.
Matrisen av momentanvärden Sxi och Syi som erhålls under mätningen används för att rita banan för den kontrollerade rotorn (varje i-te punkt på banan har koordinaterna Sxi, Syi). Storleken på den momentana radiella förskjutningen beräknas med formeln:
S∑i = √ (Sxi² + Syi²) (1)
där S∑i är momentanvärdet för den radiella förskjutningens storlek (längden på radievektorn för rotorbanan), beräknat för den i-te punkten i grafen;
- Sxi – momentanvärde för rotorns radiella kast, uppmätt längs X-axeln med sensor 2 (se fig. 6) i den i-te punkten;
- Syi – momentanvärde för rotorns radiella kast, uppmätt längs Y-axeln med sensor 3 (se fig. 6) i den i-te punkten.