การวัดการสั่นสะเทือนของโรเตอร์เชิงสัมพัทธ์โดยใช้เซ็นเซอร์วัดการเคลื่อนที่เชิงเส้นแบบไม่สัมผัส
ด้วย Balanset-1A คุณสามารถวัดค่าสัมพัทธ์ การสั่นสะเทือน ของ โรเตอร์ ใช้ตัวเข้ารหัสเชิงเส้นแบบไม่สัมผัส.
1.1 การเลือกประเภทเซ็นเซอร์และการตั้งค่า
ขึ้นอยู่กับงานที่ต้องการ อาจใช้เซ็นเซอร์วัดการสั่นสะเทือนหรือเซ็นเซอร์วัดการเคลื่อนที่สำหรับการวัด ในการเลือกประเภทของเซ็นเซอร์ จำเป็นต้องไปที่แผง “ประเภทเซ็นเซอร์” (ที่ด้านล่างของหน้าต่างหลัก) แล้วทำเครื่องหมายในช่อง “Vibro” หรือ “Linear”.
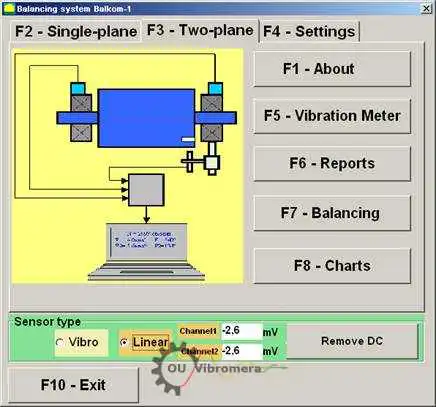
รูปที่ 1. หน้าต่างการทำงานหลักของโปรแกรม Balanset
ก่อนที่จะเริ่มการวัด จำเป็นต้องตรวจสอบให้แน่ใจว่าค่าสัมประสิทธิ์การแปลงของเซ็นเซอร์ถูกตั้งค่าไว้อย่างถูกต้อง สำหรับการนี้ ให้กดปุ่ม "F4-Settings" ในหน้าต่างการทำงานหลักของโปรแกรม (ดูรูปที่ 1) และไปที่หน้าต่างการตั้งค่าที่ออกแบบมาเพื่อป้อนค่าสัมประสิทธิ์การแปลง (ดูรูปที่ 2)
ในหน้าต่างการทำงานที่แสดงในรูปที่ 2 ในช่องที่สอดคล้องกัน ควรป้อนค่าสัมประสิทธิ์การแปลงของเซ็นเซอร์เชิงเส้นและเซ็นเซอร์การสั่นสะเทือน ค่าสัมประสิทธิ์เหล่านี้ระบุไว้ในหนังสือรับรองเครื่องมือ โดยปกติแล้วคุณไม่จำเป็นต้องเปลี่ยนแปลงค่าเหล่านี้
สำหรับเซ็นเซอร์เชิงเส้น การกระจัด ที่ใช้ในชุดเครื่องมือ Balanset-1A ค่าสัมประสิทธิ์การแปลงจะมีค่าเท่ากับ:
- Kprl1= 0.94 มิลลิโวลต์/ไมโครเมตร (ค่าสัมประสิทธิ์การเปลี่ยนแปลงของเซ็นเซอร์ของช่องสัญญาณที่ 1);
- Kprl2 = 0.94 มิลลิโวลต์/ไมโครเมตร (ค่าสัมประสิทธิ์การเปลี่ยนแปลงของเซ็นเซอร์ของช่องสัญญาณที่ 2)
สำหรับการทำงานที่ถูกต้อง ตัวเซ็นเซอร์เชิงเส้นต้องติดตั้งไว้ที่ระยะห่างจากผิวของวัตถุที่ต้องการวัดเป็นระยะทางที่กำหนดไว้ ค่าความห่างมาตรฐานระหว่างผิวของวัตถุกับปลายของเซ็นเซอร์คือ 3.5 มิลลิเมตร ในกรณีนี้ จะมีแรงดันไฟฟ้าคงที่อยู่ที่ 2.48 โวลต์ที่ 출력ของเซ็นเซอร์ แรงดันไฟฟ้านี้จะแสดงในช่อง "Channel1" และ "Channel2" ตามลำดับสำหรับช่องสัญญาณแรกและช่องสัญญาณที่สอง
เพื่อชดเชยคุณต้องกดปุ่ม "ลบ DC" ค่าความคลาดเคลื่อนคงเหลือเล็กน้อยจะไม่รบกวนการวัด
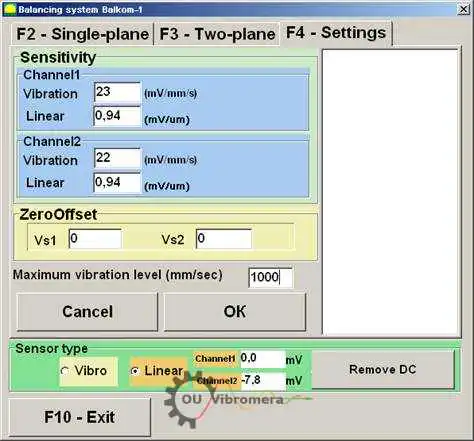
รูปที่ 2. หน้าต่างการทำงานสำหรับป้อนค่าสัมประสิทธิ์การแปลงและเลือกประเภทของเซ็นเซอร์ที่ใช้
โปรดทราบ! ค่าระยะห่างมาตรฐานและตัวคูณการแปลงของตัวเข้ารหัสเชิงเส้นที่ระบุไว้นี้ใช้สำหรับโรเตอร์ที่ทำจากเหล็ก สำหรับโรเตอร์ที่ทำจากโลหะอื่น ๆ (ทองแดง บรอนซ์ อะลูมิเนียม) ผู้ใช้ควรกำหนดค่าระยะห่างมาตรฐานและสัมประสิทธิ์การแปลงของเซ็นเซอร์จากการทดลองโดยทำการสอบเทียบ.
เพื่อบันทึกค่าพารามิเตอร์ที่เปลี่ยนแปลง ให้กดปุ่ม "ตกลง" ค่าพารามิเตอร์ใหม่จะถูกบันทึกไว้ในไฟล์ และนำไปใช้สำหรับการวัดต่อไป
1.2 การวัดการวิ่งออกด้านรัศมีของโรเตอร์
การรันเอาต์ตามแนวรัศมีของโรเตอร์สามารถวัดได้ด้วยเซ็นเซอร์แบบไม่สัมผัส หัววัดระยะใกล้ ในสองระนาบตามแผนผังที่แสดงในรูปที่ 3 เพื่อวัดและพล็อตฟังก์ชันเวลาและสเปกตรัมการเบี่ยงเบนของโรเตอร์ หากจำเป็น จะต้องดำเนินการเตรียมการหลายขั้นตอน ซึ่งรวมถึง:
- – เลือกส่วนที่มีเส้นผ่านศูนย์กลางของโรเตอร์ ซึ่งการวัดจะดำเนินการ;
- ติดตั้งเซ็นเซอร์วัดการเคลื่อนที่เชิงเส้นแบบไม่สัมผัส 5 และ 6 และ เฟส เซ็นเซอร์มุมเฟส 7 บนแท่นเครื่องโดยใช้อุปกรณ์พิเศษ (เช่น ขาตั้งแม่เหล็ก);
- – เชื่อมต่อเซ็นเซอร์ตรวจจับความใกล้ชิดของการเคลื่อนไหวเชิงเส้นเข้ากับขั้วต่อ X1 และ X2 และเซ็นเซอร์มุมเฟสเข้ากับขั้วต่อ X3 ของหน่วยวัด;
- – กำหนดช่องว่างการวัดเชิงนาม ∆ ระหว่างพื้นผิวโรเตอร์และองค์ประกอบการตรวจจับสำหรับแต่ละตัวเข้ารหัสเชิงเส้น (สำหรับโรเตอร์ที่ทำจากเหล็ก ∆ = 3.5 มม.);
- – วางเครื่องหมายสะท้อนแสงที่จำเป็นสำหรับการกระตุ้นสำหรับเซ็นเซอร์มุมเฟส 7 บนโรเตอร์ และตรวจสอบการกระตุ้นของเซ็นเซอร์
- เชื่อมต่อหน่วยวัดกับคอมพิวเตอร์.
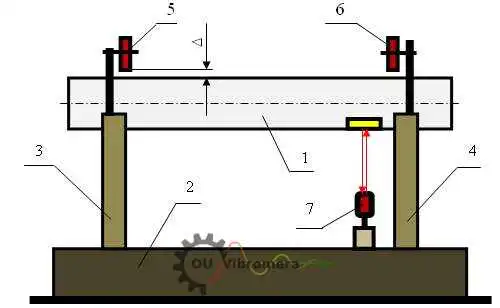
รูปที่ 3. การวัดรันเอาต์ในแนวรัศมีของโรเตอร์
หากคุณกดปุ่ม "F8 – กราฟ" ในหน้าต่างทำงานหลัก (ดูรูปที่ 1) หน้าจอคอมพิวเตอร์จะแสดงหน้าต่างทำงาน "กราฟ" (ดูรูปที่ 5) ซึ่งออกแบบมาเพื่อสร้างกราฟประเภทต่างๆ ของการวิ่งออกของโรเตอร์ในแนวรัศมี
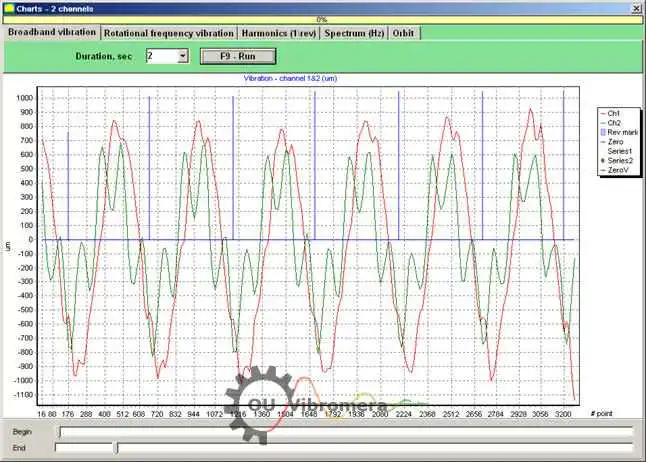
รูปที่ 5 หน้าต่างการทำงานของโหมด "แผนภูมิ"
ปุ่มในหน้าต่างนี้สร้างกราฟต่อไปนี้:
- เมื่อคุณกดปุ่ม "การสั่นสะเทือนแบบบรอดแบนด์" ในหน้าต่างนี้ ฟังก์ชันเวลาของการวิ่งออกของรัศมีโรเตอร์จะแสดงขึ้น
- หากกดปุ่ม "ความถี่การสั่นสะเทือนแบบหมุนเวียน" จะแสดงฟังก์ชันเวลาของส่วนประกอบย้อนกลับของการวิ่งออกของโรเตอร์ในแนวรัศมี
- หากคุณกดปุ่ม "ฮาร์มอนิกส์ (1/รอบ)" หน้าจอจะแสดงกราฟการแยกส่วนของการเบี่ยงเบนของโรเตอร์ออกเป็นชุดฮาร์มอนิก ฮาร์มอนิกส์แรกจะสอดคล้องกับค่าการสั่นสะเทือนที่ความถี่ย้อนกลับของโรเตอร์ (1x) ฮาร์มอนิกส์ที่สอง – ที่ความถี่สองเท่า (2x) และอื่นๆ
- โดยการกดปุ่ม "สเปกตรัม (Hz)" หน้าจอจะแสดงสเปกตรัมของการวิ่งรัศมีของโรเตอร์
- โดยการกดปุ่ม "Orbit" จะแสดงกราฟวงโคจรของโรเตอร์ (การโคจรล่วงหน้า)
1.3 การสร้างกราฟวงโคจรของโรเตอร์
การสร้างกราฟวงโคจรของโรเตอร์สามารถดำเนินการได้ตามแผนผังที่แสดงในรูปที่ 6

รูปที่ 6. แผนผังการวัดวงโคจรของโรเตอร์ 1a – โรเตอร์ (มุมมองด้านปลาย); 1b – โรเตอร์ (มุมมองด้านข้าง); 2, 3 – เซ็นเซอร์แบบไม่สัมผัส; 4 – เครื่องหมายสะท้อนของเซ็นเซอร์มุมเฟส
เพื่อทำการวัดและสร้างกราฟที่สอดคล้องกัน จำเป็นต้องดำเนินการเตรียมการหลายขั้นตอน ซึ่งรวมถึง:
- – ติดตั้งตัวเข้ารหัสเชิงเส้นแบบไม่สัมผัส 2 และ 3 ในหนึ่งในส่วนที่มีเส้นผ่านศูนย์กลางของโรเตอร์ โดยให้ทำมุม 90° กับกันและกัน โดยมีเงื่อนไขว่าแกนวัดของตัวเข้ารหัส 2 ต้องตรงกับแกน X และแกนวัดของตัวเข้ารหัส 3 ต้องตรงกับแกน Y;
- ตั้งค่าระยะวัดที่กำหนด ∆x (∆y) ระหว่างผิวโรเตอร์กับองค์ประกอบตรวจจับของ linear encoder แต่ละตัว (สำหรับเหล็ก ∆ = 3.5 mm);
- – ตั้งค่าเซ็นเซอร์มุมเฟส (ไม่แสดงในแผนผัง) ในระนาบ X – Z ให้ตรงกับระนาบการติดตั้งของเซ็นเซอร์แบบไม่สัมผัส 2;
- ตั้งเครื่องหมายสะท้อนแสง 4 บนโรเตอร์ 1 ในระนาบ X – Z ซึ่งจำเป็นสำหรับการทำงานของเซ็นเซอร์มุมเฟส;
- – เชื่อมต่อตัวเข้ารหัสเชิงเส้นแบบไม่สัมผัส 2 และ 3 เข้ากับขั้วต่อ X1 และ X2 และตัวเข้ารหัสมุมเฟสเข้ากับขั้วต่อ X3 ของหน่วยวัด
- เชื่อมต่อหน่วยวัดกับคอมพิวเตอร์.
ในการเริ่มวัดวงโคจรของโรเตอร์ในหน้าต่างการทำงานหลัก (ดูรูปที่ 1) ให้กดปุ่ม “F8 – Charts” และไปที่หน้าต่างการทำงาน “Graphs” (ดูรูปที่ 5) ซึ่งออกแบบมาเพื่อสร้างกราฟประเภทต่างๆ ของการวิ่งออกนอกแนวรัศมีของโรเตอร์ในหน้าต่างการทำงานนี้ คุณต้องกดปุ่ม “Orbit” หลังจากนั้นหน้าต่างการทำงานจะปรากฏบนหน้าจอคอมพิวเตอร์ ซึ่งจะมีการดำเนินการวัดตามรอบที่จำเป็น (ดูรูปที่ 7).

รูปที่ 7. กราฟของวงโคจรโรเตอร์ ซอฟต์แวร์ Balanset
เพื่อทำงานต่อในหน้าต่างการทำงานที่กำหนด (ดูรูปที่ 7) คุณต้องเปิดการหมุนของโรเตอร์ และโดยการกดปุ่ม “F9 – RUN” ให้ทำการวัดค่าทันทีของการแกว่งหนีศูนย์แนวรัศมีของโรเตอร์ Sxi และ Syi เป็นช่วงเวลาเท่ากับการหมุนของโรเตอร์หนึ่งรอบ
อาร์เรย์ของค่าทันที Sxi และ Syi ที่ได้จากการวัดใช้ในการพล็อตวงโคจรของโรเตอร์ที่ควบคุม (แต่ละจุดที่ i ของวงโคจรมีพิกัด Sxi, Syi) ค่าขนาดการกระจัดแนวรัศมีทันทีคำนวณด้วยสูตร:
S∑i = √ (Sxi² + Syi²) (1)
โดยที่ S∑i คือค่าทันทีของขนาดการกระจัดแนวรัศมี (ความยาวของเวกเตอร์รัศมีของวงโคจรโรเตอร์) ที่คำนวณสำหรับจุดที่ i ของกราฟ;
- Sxi – ค่าทันทีของการแกว่งหนีศูนย์แนวรัศมีของโรเตอร์ วัดตามแกน X ด้วยเซนเซอร์ 2 (ดูรูปที่ 6) ที่จุดที่ i;
- Syi – ค่าทันทีของการแกว่งหนีศูนย์แนวรัศมีของโรเตอร์ วัดตามแกน Y ด้วยเซนเซอร์ 3 (ดูรูปที่ 6) ที่จุดที่ i