خدمات بالانس › کاهش لرزش دستگاه
چگونه لرزش دستگاه را از بین ببریم — تشخیص، سپس رفع
ارتعاش بیش از حد در ماشینآلات چرخان عمر یاتاقان را کوتاه میکند، آببندها را از بین میبرد، جوشها را ترک میدهد و باعث خاموشیهای برنامهریزینشده میشود. قبل از افزودن وزنهی تعادل، باید بدانید که مقصر چیست عدم تعادل، ناهممحوری، لقی، آسیب یاتاقان یا تشدید هر نقص یک اثر انگشت فرکانسی متمایز دارد. این صفحه به شما نشان میدهد چگونه آن اثر انگشت را بخوانید و پس از تأیید عدم تعادل، چگونه آن را با ترازسازی میدانی در سرعت عملیاتی برطرف کنید.

خلاصه: برای کاهش ارتعاش در یک ماشین دورانی، ابتدا طیف FFT را اندازهگیری کنید تا فرکانس غالب را شناسایی کنید. یک قله دقیقاً در 1× RPM با زاویه فاز ثابت نشاندهنده عدم تعادل است — شایعترین و قابل اصلاحترین علت. توازن در محل با دستگاه Balanset-1A حسگرهای لرزش و تاکوमीटर لیزری را به ماشین در حال کار متصل میکند، جرم و زاویه اصلاحی دقیق را در دو یا سه دوره اندازهگیری کوتاه محاسبه میکند و بدون جدا کردن روتور از یاتاقانها، عدم توازن را برطرف میسازد. یک عملیات معمولی کمتر از یک ساعت طول میکشد و معمولاً لرزش را ۷۰ درصد یا بیشتر کاهش داده و عمر بلبرینگ را تا ۱۰ برابر افزایش میدهد.
پیش از اقدام، علت را تشخیص دهید.
شکستگیهای مختلف با فرکانسها و در جهات گوناگون میلرزند. اندازهگیری دامنه، فاز و طیف FFT قبل از هرگونه مداخله دقیقاً به شما میگوید با چه چیزی سروکار دارید. جدول زیر یک مرجع سریع است — قبل از دست زدن به حتی یک پیچ آن را مطالعه کنید.
| عیب | فرکانس غالب | جهت | سرنخ کلیدی | اولین اقدام |
|---|---|---|---|---|
| نامیزانی | تنها ۱× RPM | شعاعی | فاز پایدار؛ تغییر وزن آزمایشی همزمان دامنه و فاز را تغییر میدهد. | تراز میدانی (به پایین مراجعه کنید) |
| ناهمترازی | ۱× + دور موتور قوی ۲× | ارتعاش محوری بالا | کوپلینگ داغ میکند؛ نسبت ارتعاش محوری به شعاعی بالاست | ابتدا محور انتقال قدرت را دوباره تراز کنید |
| آسیب بلبرینگ | BPFO / BPFI / BSF (غیرمضربِ صحیح RPM) | شعاعی | روند کلی صعودی در طول هفتهها؛ هیچ ارتباطی با تغییر سرعت ندارد | بلبرینگ را تعویض کنید، سپس بالانس کنید. |
| سستی سازهای | ۰.۵×، ۱×، ۱.۵×، ۲×… (هارمونیکهای زیاد) | شعاعی یا محوری | در بار جزئی وزوز میکند؛ طیف شانه پر سر و صدا | سفت کردن / تعمیر عنصر شل |
| رزونانس | نوسان نزدیک به فرکانس طبیعی | متغیر | جابجایی فاز در حدود ۱۸۰ درجه در سراسر سرعت تشدیدی | ساختار را از تشدید خارج کنید یا آن را صلبتر کنید؛ با بالانس، تحریک را کاهش دهید |
| نواقص ترکیبی | چندین قله، فاز ناپایدار | مختلط | دو یا سه نقص بهطور همزمان | ابتدا مشکلات مکانیکی را برطرف کنید؛ در آخر تعادل را برقرار کنید. |
قاعده کلی: اگر مؤلفهٔ ۱×RPM بیش از ۸۰ درصد از کل انرژی ارتعاش را حمل کند و زاویهٔ فاز تا ±۵° قابل تکرار باشد، عدم توازن علت غالب است و بالانسگیری در محل گام بعدی مناسب است. اگر فرکانسهای دیگر قابل توجه باشند، ابتدا آنها را برطرف کنید وگرنه اصلاح بالانس در توقف نگهداری بعدی جابهجا خواهد شد.
شناسایی عدم تعادل — شایعترین و قابل اصلاحترین علت
عدم تعادل عامل بیشتر شکایتهای ارتعاشی در تجهیزات دوار است. اینها نشانههای مشخصه آن هستند:
چرا عدم تعادل رخ میدهد — و هزینهی آن چیست
هر روتور از کارخانه با یک عدم تعادل باقیماندهٔ کوچک خارج میشود — یک ناهمسانی جرمی ناچیز که طبق استانداردهای ISO 21940-11 باید کنترل شود. در حین بهرهبرداری، آن تعادل تغییر میکند: فرسایش و کاویتاسیون بهطور نامنظم به پرههای پروانه آسیب میزنند، رسوب و تهنشینی بهطور نامتقارن روی پرههای فن انباشته میشوند، تعمیر جوشی یا پره جایگزین جرم نامتقارن اضافه میکند، و اعوجاج حرارتی هنگام راهاندازی یا خاموشی، خط مرکزی شفت را خم میکند.
زیرا نیروی گریز از مرکز با مجذور مربع در سرعت چرخشی، چند گرم جابجایی در ۷۵۰ دور در دقیقه، در ۳۰۰۰ دور در دقیقه به دهها کیلو نیوتن نیروی تکاندهنده تبدیل میشود. آن بار محوری دورهای باعث خستگی یاتاقانهای غلتکی میشود، آببندیهای مکانیکی را شل میکند، دوغاب را ترک میدهد و پیچهای مهار را شل میکند — که سپس باعث ایجاد لقی و تشدید هر منبع ارتعاش دیگری میشود. یک خاموشی برنامهریزینشده ناشی از آسیب زنجیرهای ارتعاش، معمولاً به دلیل از دست دادن تولید و نیروی کار اضطراری، هزینهای بسیار بیشتر از یک کار بالانس در محل به مدت یک ساعت خواهد داشت.
چرا نصف کردن ارتعاش، عمر یاتاقان را چند برابر میکند؟
چگونه با ترازسازی میدانی ارتعاش را از بین ببریم — گام به گام
پیش از آنکه به هر راهکار مشخصی متعهد شوید، این توالی تشخیصی را با Balanset-1A دنبال کنید. نادیده گرفتن این مراحل رایجترین دلیلِ «کار نکردن» بالانس است:
- لرزش پایه را اندازه بگیرید. سطح کلی (mm/s RMS)، دامنه و فاز مؤلفه 1× RPM و طیف کامل FFT را ثبت کنید. این کار نشان میدهد آیا انرژی غالب در 1× (عدم تعادل) است یا در فرکانسهای دیگر (عیبهای دیگر). اگر 1× غالب نیست، وارد بالانس نشوید.
- ابتدا نقصهای مکانیکی را برطرف کنید. بازرسی کنید تا پیچهای مهاری شل، محفظههای یاتاقان فرسوده، ناهمسوئی شفت و آسیبهای مکانیکی آشکار مشخص شوند. در صورت نیاز سفت کنید، همتراز کنید و تعویض نمایید، سپس مجدداً اندازهگیری کنید. نقصهای مکانیکی محاسبات ضریب تأثیر را مختل میکنند.
- نامتعادل بودن را با وزنهای آزمایشی تأیید کنید. یک جرم آزمایشی شناختهشده را در موقعیت زاویهای انتخابشده به روتور متصل کنید و دوباره اجرا کنید. تغییر واضح در دامنه و فاز در 1× تأیید میکند که روتور به اصلاح جرم پاسخ میدهد — شما با عدم تعادل سروکار دارید، نه چیز دیگری.
- بگذار دستگاه اصلاح را محاسبه کند. بالانسِت-۱A از الگوریتم ضریب تأثیر برای محاسبهٔ دقیق جرم اصلاحی و موقعیت زاویهای در یک یا دو صفحه استفاده میکند. وزن اصلاحی (جوش، پیچ یا گیره) را در زاویهٔ محاسبه شده نصب کنید.
- مطابقت با ISO 20816 را تأیید کنید. یک اجرای اندازهگیری نهایی تأیید میکند که ارتعاش باقیمانده در محدوده پذیرش ISO 20816 برای کلاس ماشین قرار دارد و عدم تعادل باقیمانده در محدوده تلرانس درجه G استاندارد ISO 21940-11 است. Balanset-1A یک گزارش مستند ذخیره میکند.
تجهیزاتی که برای کاهش لرزش متعادل میکنیم
- پروانههای فن صنعتی و بلوئرهای گریز از مرکز
- روتورهای پمپ و پروانههای گریز از مرکز
- روتورهای موتور الکتریکی و روتورهای ژنراتور
- پروانههای کمپرسور و روتورهای کمپرسور پیچی
- میلگاردانها و شفتهای کاردان
- درامهای کمباین و ماشینهای کشاورزی
- غلتکها، درامها و سیلندرهای فرایندی
- سپیندلها و نگهدارندههای ابزار CNC
- روتورهای توربین و پروانههای توربوشارژر
- آسیابها، جداکنندهها و روتورهای سانتریفیوژ
- هر روتور صلبی که بتوان آن را با حسگرها و وزنههای آزمایشی متصل، بهطور ایمن به کار انداخت.
استانداردهای ارتعاش و تلرانسهای بالانس
ISO 20816 (و نسخه پیشین آن ISO 10816) zoneهای ارزیابی شدت ارتعاش A–D را تعریف میکند که روی قطعات غیرچرخان در سرعت کاری اندازهگیری میشوند. Zone A کیفیت ماشین نو است؛ Zone D یعنی فوراً خاموش کنید. مرزهای zone به گروه ماشین، توان و انعطافپذیری تکیهگاه بستگی دارند — برای مثال، در ماشینهای متوسط (15–300 kW، Group 2) روی تکیهگاههای صلب، مرز Zone B/C برابر 2.8 mm/s RMS است، در حالی که برای ماشینهای بزرگ (>300 kW، Group 1) روی تکیهگاههای صلب 4.5 mm/s RMS است. پیش از قضاوت درباره شدت، گروه و کلاس تکیهگاه قابلاعمال را از استاندارد انتخاب کنید؛ یک حد عمومی واحد را برای همه ماشینها به کار نبرید.
ISO 21940-11 (formerly ISO 1940-1) درجات G عدم تعادل باقیمانده را از G0.4 (اسپیندلهای سنگزنی دقیق) تا G40 (محرکهای کشاورزی) تعریف میکند. اهداف رایج صنعتی: فنها و بلوئرها G6.3، پمپها و کمپرسورها G2.5، موتورهای الکتریکی G2.5–G1.0، اسپیندلهای دقیق G1.0 یا دقیقتر. ما مطابق درجهای که سازنده تجهیزات شما مشخص میکند بالانس انجام میدهیم و مقادیر مستند عدم تعادل باقیمانده را در گزارش بالانس ارائه میکنیم. از محاسبهی عدم تعادل باقیمانده برای یافتن حد تحمل مجاز خود پیش از شروع.
| نوع تجهیزات | درجهٔ G معمول | مقدار G = eبه ازای هر × ω (mm/s) |
|---|---|---|
| اسپیندلهای سنگزنی دقیق، ژیروسکوپها | جی۰.۴ | ۰.۴ میلیمتر بر ثانیه |
| روتورهای توربین گازی، توربوشارژرها | G1.0–G2.5 | ۱–۲٫۵ میلیمتر بر ثانیه |
| پروانههای پمپ گریز از مرکز، موتورهای الکتریکی | جی ۲.۵ | ۲٫۵ میلیمتر بر ثانیه |
| هواکشهای صنعتی، دمنده، سانتریفیوژها | جی۶.۳ | ۶٫۳ میلیمتر بر ثانیه |
| غلتکهای فرایندی، درامها، ماشینآلات عمومی | G6.3–G16 | ۶٫۳–۱۶ میلیمتر بر ثانیه |
| ماشینآلات کشاورزی و آفرود | G16–G40 | ۱۶–۴۰ میلیمتر بر ثانیه |
نکته: عدد G خود حاصلضرب eبه ازای هر × ω بر حسب mm/s است. نامیزانی ویژه باقیمانده مجاز به سرعت کاری بستگی دارد: eبه ازای هر [g·mm/kg] = 9549 × G / n، که در آن n بر حسب rpm است — برای مثال، G6.3 در 3000 rpm مقدار e را میدهدبه ازای هر ≈ 20 g·mm/kg.
Balanset-1A — کیت کامل بالانس در محل شما
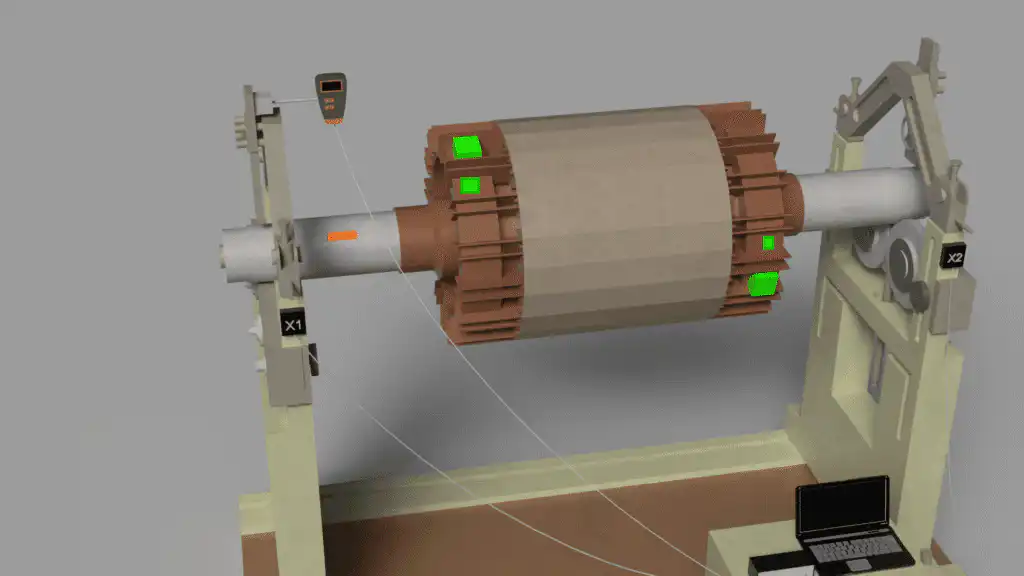
تمام موارد این صفحه با یک ابزار قابل حمل انجام میشود: Balanset-1A. این یک بالانسکنندهٔ دینامیکی دوکاناله و آنالیزور ارتعاش است که هر روتور صلبی را بالانس میکند. در یاتاقانهای خود، در سرعت عملیاتی، با استفاده از روش ضریب تاثیر 3-run — نرمافزار جرم اصلاحی و زاویه دقیق را محاسبه میکند و گزارش را ذخیره میکند.

محتویات کیت کامل
€1,975 · کیت کامل، موجود، فاکتور با مالیات بر ارزش افزوده
- واحد اندازهگیری رابط (USB، ۲ کانال)
- دو شتابسنج ارتعاش (کابل 4 m، 10 m اختیاری)
- تاکومتر لیزری / حسگر فاز نوری (50–500 mm)
- پایهٔ مغناطیسی برای حسگر
- ترازو دیجیتال برای وزنهای آزمایشی و اصلاحی
- نرمافزار بالانسینگ و تحلیل ویندوز
- جعبه حمل پلاستیکی
کیت کامل
واحد · 2 حسگر · تاکومتر لیزری · پایه مغناطیسی · ترازوی دیجیتال · نرمافزار · کیف حمل. هرآنچه برای شروع بالانس، بلافاصله پس از باز کردن جعبه، نیاز است.
مجموعه OEM
واحد · 2 حسگر · تاکومتر لیزری · نرمافزار. برای یکپارچهسازانی که از قبل پایه، ترازو و کیف دارند یا واحد را در یک دستگاه بالانس یکپارچه میکنند.
| پارامتر | مقدار |
|---|---|
| کانالهای اندازهگیری | ۲ (تعادلیابی تکصفحهای و دوصفحهای) |
| محدوده سرعت ارتعاش | 0.2–80 mm/s RMS |
| محدوده فرکانس | 5–1000 Hz (≤10% amplitude error above 550 Hz) |
| دقت اندازهگیری | ±5% از مقیاس کامل |
| روش | ضریب تأثیر ۳-دورهای (یک یا دو صفحه) |
| تحلیل | دامنه و فاز در 1×، طیف FFT و شکل موج، گزارشهای ذخیره شده |
| لپتاپ | شامل نمیشود (رایانهٔ ویندوزی، در صورت درخواست موجود است) |
موارد واقعی کاهش لرزش
وقتی تعادل برقرار کردن فایده ندارد
تشخیص سیستماتیک ماشینی که اصلاحات تعادل در کاهش ارتعاش آن ناکام ماند — و اینکه علت واقعی چه بود.

هر چند وقت یکبار بررسی کنیم
فواصل زمانی توصیهشده برای پایش ارتعاش در انواع مختلف ماشینآلات و محیطهای عملیاتی.
راهنمای بالانس میدانی
نظریه، عمل و حل مسئله برای بالانس روتور میدانی با دستگاه Balanset-1A.
کalkulatorsهای نوسان آزاد و بالانس
پرسشهای متداول در مورد کاهش لرزش
من روتور را بالانس کردم اما دستگاه هنوز میلرزد — چرا؟
چگونه بفهمم مشکل ناشی از عدم تعادل است یا همترازی نادرست؟
آیا میتوانم ماشینی را که یاتاقانهایش نیز آسیب دیدهاند، بالانس کنم؟
طبق استاندارد ISO 20816، چه سطح ارتعاش قابل قبولی است؟
با چه فواصل زمانی باید ارتعاش و توازن تجهیزات دورانی را بررسی کنم؟
اگر لرزش بلافاصله پس از بالانس کردن دوباره بازگردد چه؟
نظریه را بیاموزید
عیب را تشخیص دهید — سپس آن را برطرف کنید
بالانسنت-۱A دامنه ارتعاش، فاز و کل طیف FFT را اندازهگیری میکند تا بتوانید پیش از اقدام به اصلاح، علت اصلی را تأیید کنید، سپس هر روتور صلب را در یاتاقانهای خود در سرعت عملیاتی بالانس میکند و نتایج را مطابق استانداردهای ISO 20816 و ISO 21940-11 مستند میسازد.