






3. Persyaratan untuk Konstruksi Unit Dasar dan Mekanisme Mesin Penyeimbang 3.1. Bantalan 3.1.1. Landasan Teoritis Desain Bantalan
Pada bagian sebelumnya, eksekusi desain utama penyangga Soft Bearing dan Hard Bearing untuk mesin penyeimbang telah dibahas secara rinci. Parameter penting yang harus dipertimbangkan oleh para perancang ketika merancang dan membuat penyangga ini adalah frekuensi alami osilasi. Hal ini penting karena pengukuran tidak hanya amplitudo getaran (deformasi siklik) dari penyangga tetapi juga fase getaran diperlukan untuk menghitung parameter bobot korektif oleh sistem pengukuran dan komputasi mesin.
Jika frekuensi alami penyangga bertepatan dengan frekuensi rotasi rotor seimbang (resonansi penyangga), pengukuran amplitudo dan fase getaran yang akurat secara praktis tidak mungkin dilakukan. Hal ini diilustrasikan dengan jelas dalam grafik yang menunjukkan perubahan amplitudo dan fase osilasi penyangga sebagai fungsi frekuensi rotasi rotor seimbang (lihat Gbr. 3.1).
Dari grafik ini, dapat disimpulkan bahwa ketika frekuensi rotasi rotor seimbang mendekati frekuensi alami osilasi penyangga (yaitu, ketika rasio fp/fo mendekati 1), ada peningkatan amplitudo yang signifikan terkait dengan osilasi resonansi penyangga (lihat Gbr. 3.1.a). Bersamaan dengan itu, grafik 3.1.b menunjukkan bahwa pada zona resonansi, terjadi perubahan tajam pada sudut fase ∆F°, yang dapat mencapai 180°.
Dengan kata lain, ketika menyeimbangkan mekanisme apa pun di zona resonansi, bahkan perubahan kecil dalam frekuensi rotasinya dapat menyebabkan ketidakstabilan yang signifikan dalam hasil pengukuran amplitudo dan fase getarannya, yang menyebabkan kesalahan dalam menghitung parameter bobot korektif dan secara negatif memengaruhi kualitas penyeimbangan.
Grafik di atas mengkonfirmasi rekomendasi sebelumnya bahwa untuk mesin Hard Bearing, batas atas frekuensi operasional rotor harus (setidaknya) 2-3 kali lebih rendah dari frekuensi alami penyangga, fo. Untuk mesin Soft Bearing, batas bawah frekuensi operasional yang diizinkan dari rotor seimbang harus (setidaknya) 2-3 kali lebih tinggi dari frekuensi alami penyangga.
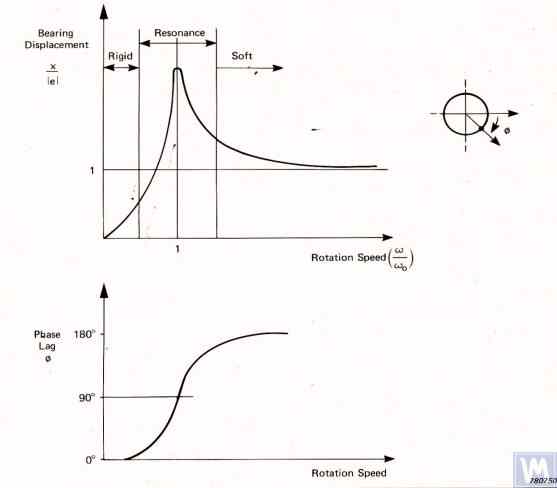
Gambar 3.1. Grafik yang menunjukkan perubahan amplitudo relatif dan fase getaran penyangga mesin penyeimbang sebagai fungsi perubahan frekuensi rotasi.
Mengingat informasi yang disajikan, mengoperasikan mesin di area resonansi penyangganya (disorot dengan warna merah pada Gbr. 3.1) tidak disarankan. Grafik yang ditunjukkan pada Gbr. 3.1 juga menunjukkan bahwa untuk ketidakseimbangan rotor yang sama, getaran aktual penyangga mesin Soft Bearing secara signifikan lebih rendah daripada yang terjadi pada penyangga mesin Soft Bearing.
Dari sini, dapat disimpulkan bahwa sensor yang digunakan untuk mengukur getaran penyangga pada mesin Hard Bearing harus memiliki sensitivitas yang lebih tinggi daripada yang ada pada mesin Soft Bearing. Kesimpulan ini didukung dengan baik oleh praktik penggunaan sensor yang sebenarnya, yang menunjukkan bahwa sensor getaran absolut (vibro-accelerometer dan / atau sensor kecepatan getaran), yang berhasil digunakan pada mesin penyeimbang Bantalan Lunak, sering kali tidak dapat mencapai kualitas penyeimbangan yang diperlukan pada mesin Bantalan Keras.
Pada mesin-mesin ini, disarankan untuk menggunakan sensor getaran relatif, seperti sensor gaya atau sensor perpindahan yang sangat sensitif.
3.1.2. Memperkirakan Frekuensi Alamiah Dukungan Menggunakan Metode Perhitungan
Seorang perancang dapat melakukan perhitungan perkiraan (estimasi) frekuensi alami dari penyangga fo menggunakan rumus 3.1, dengan memperlakukannya secara sederhana sebagai sistem getaran dengan satu derajat kebebasan, yang (lihat Gbr. 2.19.a) diwakili oleh sebuah massa M, berosilasi pada pegas dengan kekakuan K.
fo = 2π1MK (3.1)
Massa M yang digunakan dalam perhitungan untuk rotor antar-bantalan simetris dapat didekati dengan rumus 3.2.
M = Mo + nMr (3.2) di mana Mo adalah massa bagian penyangga yang bergerak dalam kg; Mr adalah massa rotor yang diseimbangkan dalam kg; n adalah jumlah penyangga alat berat yang terlibat dalam penyeimbangan.
Kekakuan K dari penyangga dihitung dengan menggunakan rumus 3.3 berdasarkan hasil studi eksperimental yang melibatkan pengukuran deformasi ΔL penyangga ketika dibebani dengan gaya statis P (lihat Gbr. 3.2.a dan 3.2.b).
K = ΔLP (3.3) di mana ΔL adalah deformasi penyangga dalam meter; P adalah gaya statis dalam Newton.
Besarnya gaya pembebanan P dapat diukur dengan menggunakan alat pengukur gaya (misalnya, dinamometer). Perpindahan penyangga ΔL ditentukan dengan menggunakan alat untuk mengukur perpindahan linear (misalnya, indikator dial).
3. Persyaratan untuk Konstruksi Unit Dasar dan Mekanisme Mesin Penyeimbang 3.1. Bantalan 3.1.2. Menghitung Frekuensi Alamiah Dukungan dengan Metode Komputasi
Perhitungan frekuensi alami penyangga menggunakan skema perhitungan yang dibahas di atas dapat dilakukan dalam dua arah:
Menghitung frekuensi alami penyangga dalam arah vertikal memerlukan penggunaan teknik perhitungan yang lebih kompleks, yang (selain parameter penyangga dan rotor seimbang itu sendiri) harus mempertimbangkan parameter rangka dan spesifikasi pemasangan mesin pada pondasi. Metode ini tidak dibahas dalam publikasi ini. Analisis rumus 3.1 memungkinkan beberapa rekomendasi sederhana yang harus dipertimbangkan oleh perancang mesin dalam kegiatan praktis mereka. Secara khusus, frekuensi alami dari sebuah penyangga dapat diubah dengan mengubah kekakuan dan/atau massanya. Meningkatkan kekakuan akan meningkatkan frekuensi natural dari penyangga, sementara meningkatkan massa akan menurunkannya. Perubahan ini memiliki hubungan non-linier, hubungan kuadrat terbalik. Sebagai contoh, menggandakan kekakuan penyangga hanya akan meningkatkan frekuensi natural dengan faktor 1,4. Demikian pula, menggandakan massa bagian penyangga yang bergerak akan mengurangi frekuensi natural hanya dengan faktor 1,4.
3.1.3. Metode Eksperimental untuk Menentukan Frekuensi Alamiah Dukungan
Mengingat bahwa kalkulasi frekuensi natural penyangga yang dibahas di atas, yang dilakukan dengan menggunakan metode yang disederhanakan, dapat menyebabkan kesalahan yang signifikan, sebagian besar pengembang amatir lebih suka menentukan parameter ini dengan metode eksperimental. Untuk ini, mereka memanfaatkan kemampuan yang disediakan oleh sistem pengukuran getaran modern dari mesin penyeimbang, termasuk instrumen seri "Balanset".
3.1.3.1. Menentukan Frekuensi Alamiah Penyangga dengan Metode Eksitasi Tumbukan
Metode eksitasi tumbukan adalah cara yang paling sederhana dan paling umum untuk menentukan frekuensi alami getaran penyangga atau komponen mesin lainnya. Metode ini didasarkan pada fakta bahwa ketika suatu benda, seperti lonceng (lihat Gbr. 3.3), dieksitasi dengan tumbukan, responsnya bermanifestasi sebagai respons getaran yang berangsur-angsur meluruh. Frekuensi sinyal getaran ditentukan oleh karakteristik struktural objek dan sesuai dengan frekuensi getaran alaminya. Untuk eksitasi tumbukan getaran, alat berat apa pun dapat digunakan, seperti palu karet atau palu biasa.
Gambar 3.3. Diagram Eksitasi Tumbukan yang Digunakan untuk Menentukan Frekuensi Alamiah Suatu Benda
Massa palu harus kira-kira 10% dari massa benda yang dieksitasi. Untuk menangkap respons getaran, sensor getaran harus dipasang pada benda yang sedang diperiksa, dengan sumbu pengukur yang sejajar dengan arah eksitasi tumbukan. Dalam beberapa kasus, mikrofon dari alat pengukur kebisingan dapat digunakan sebagai sensor untuk merasakan respons getaran objek.
Getaran objek diubah menjadi sinyal listrik oleh sensor, yang kemudian dikirim ke alat ukur, seperti input dari penganalisis spektrum. Instrumen ini merekam fungsi waktu dan spektrum proses getaran yang meluruh (lihat Gbr. 3.4), yang analisisnya memungkinkan untuk menentukan frekuensi (frekuensi) getaran alami objek.
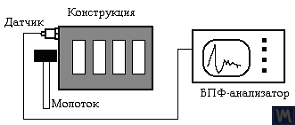
Gambar 3.4. Diagram Pengukuran dan Perekaman Getaran Alamiah Objek
Seperti kebanyakan alat ukur getaran modern, sistem pengukuran seri "Balanset" dapat digunakan untuk menentukan frekuensi alami suatu objek (misalnya, penyangga mesin penyeimbang) ketika getarannya terkena benturan. Prosedur ini pada perangkat seri "Balanset" dapat dilakukan baik dalam mode fungsi tambahan pada perangkat "Grafik. Spektrum" atau dalam mode khusus "Grafik. Impact", yang disertakan dalam versi terbaru perangkat lunak "Balanset 1".
Sebagai hasil dari prosedur ini, jendela kerja dengan grafik fungsi waktu dan spektrum getaran yang meluruh, yang terjadi pada struktur yang diperiksa pada saat eksitasi tumbukan, ditampilkan pada layar komputer. Contoh grafik tersebut ditunjukkan pada Gambar 3.5.

Gambar 3.5. Antarmuka Program yang Menampilkan Grafik Fungsi Waktu dan Spektrum Getaran Impak Luruh dari Struktur yang Diperiksa
Analisis grafik spektrum yang disajikan pada Gambar 3.5 (lihat bagian bawah jendela kerja) menunjukkan bahwa komponen utama getaran alami struktur yang diperiksa, ditentukan dengan mengacu pada sumbu absis grafik, terjadi pada frekuensi 9,5 Hz. Metode ini dapat direkomendasikan untuk studi getaran alami penyangga mesin penyeimbang Soft Bearing dan Hard Bearing.
3.1.3.2. Menentukan Frekuensi Alami Penyangga dalam Mode Meluncur
Dalam beberapa kasus, frekuensi alami penyangga dapat ditentukan dengan mengukur amplitudo dan fase getaran "di pantai" secara siklis. Dalam menerapkan metode ini, rotor yang dipasang pada mesin yang diperiksa pada awalnya dipercepat ke kecepatan rotasi maksimumnya, setelah itu penggeraknya diputuskan, dan frekuensi gaya yang mengganggu yang terkait dengan ketidakseimbangan rotor secara bertahap menurun dari maksimum ke titik berhenti.
Dalam hal ini, frekuensi natural penyangga dapat ditentukan oleh dua karakteristik:
Pada perangkat seri "Balanset", mode "Vibrometer" ("Balanset 1") atau mode "Balancing. Monitoring" ("Balanset 2C" dan "Balanset 4") dapat digunakan untuk mendeteksi frekuensi alami objek "di pantai", yang memungkinkan pengukuran siklus amplitudo dan fase getaran pada frekuensi putaran rotor.
Selain itu, perangkat lunak "Balanset 1" juga menyertakan mode "Graphs. Coasting", yang memungkinkan memplot grafik perubahan amplitudo dan fase getaran penyangga di pantai sebagai fungsi perubahan frekuensi rotasi, yang secara signifikan memfasilitasi proses diagnosis resonansi.
Perlu dicatat bahwa, untuk alasan yang jelas (lihat bagian 3.1.1), metode identifikasi frekuensi alami penyangga di pantai hanya dapat digunakan dalam kasus mempelajari mesin penyeimbang Bantalan Lunak, di mana frekuensi kerja rotasi rotor secara signifikan melebihi frekuensi alami penyangga pada arah melintang.
Dalam kasus mesin Hard Bearing, di mana frekuensi kerja rotasi rotor yang menggairahkan getaran penyangga di pantai secara signifikan di bawah frekuensi alami penyangga, penggunaan metode ini secara praktis tidak mungkin dilakukan.
3.1.4. Rekomendasi Praktis untuk Merancang dan Memproduksi Pendukung untuk Mesin Penyeimbang 3.1.4.1. Mesin Bantalan Lunak dengan Pegas Pelat Datar
Beberapa variasi desain penyangga mesin balancing yang dibuat dengan pegas datar telah dibahas di atas pada bagian 2.1 dan diilustrasikan pada Gambar 2.7 - 2.9. Menurut informasi kami, desain seperti itu paling sering digunakan pada mesin yang ditujukan untuk menyeimbangkan poros penggerak.
Sebagai contoh, mari kita pertimbangkan parameter pegas yang digunakan oleh salah satu klien (LLC "Rost-Service", St. Petersburg) dalam pembuatan penyangga mesin mereka sendiri. Mesin ini dimaksudkan untuk menyeimbangkan poros penggerak 2, 3, dan 4 penyangga, dengan massa tidak melebihi 200 kg. Dimensi geometris pegas (tinggi * lebar * tebal) yang digunakan untuk menopang spindel terdepan dan spindel yang digerakkan dari mesin, yang dipilih oleh klien, masing-masing adalah 3002003 mm.
Frekuensi alami penyangga yang tidak dibebani, yang ditentukan secara eksperimental dengan metode eksitasi tumbukan menggunakan sistem pengukuran standar mesin "Balanset 4", ditemukan sebesar 11 - 12 Hz. Pada frekuensi alami getaran penyangga seperti itu, frekuensi rotasi yang direkomendasikan dari rotor yang seimbang selama penyeimbangan tidak boleh lebih rendah dari 22-24 Hz (1320 - 1440 RPM).
Dimensi geometris pegas datar yang digunakan oleh pabrikan yang sama pada penyangga perantara masing-masing adalah 2002003 mm. Terlebih lagi, seperti yang ditunjukkan oleh penelitian, frekuensi natural penyangga ini lebih tinggi, mencapai 13-14 Hz.
Berdasarkan hasil pengujian, produsen mesin disarankan untuk menyelaraskan (menyamakan) frekuensi alami spindel dan penyangga perantara. Hal ini akan memudahkan pemilihan kisaran frekuensi rotasi operasional poros penggerak selama penyeimbangan dan menghindari potensi ketidakstabilan pembacaan sistem pengukuran akibat penyangga yang memasuki area getaran resonansi.
Metode untuk menyesuaikan frekuensi alami getaran penyangga pada pegas datar sudah jelas. Penyesuaian ini dapat dicapai dengan mengubah dimensi geometris atau bentuk pegas datar, yang dicapai, misalnya, dengan menggiling slot memanjang atau melintang yang mengurangi kekakuannya.
Seperti yang telah disebutkan sebelumnya, verifikasi hasil penyesuaian tersebut dapat dilakukan dengan mengidentifikasi frekuensi alami getaran penyangga dengan menggunakan metode yang dijelaskan pada bagian 3.1.3.1 dan 3.1.3.2.
Gambar 3.6 menyajikan versi klasik dari desain penyangga pada pegas datar, yang digunakan pada salah satu mesinnya oleh A. Sinitsyn. Seperti yang ditunjukkan pada gambar, penyangga mencakup komponen-komponen berikut:

Gambar 3.6. Variasi Desain Penyangga pada Pegas Datar
Pelat atas 1 penyangga dapat digunakan untuk memasang spindel atau bantalan perantara. Tergantung pada tujuan penyangga, pelat bawah 4 dapat dipasang secara kaku pada pemandu mesin atau dipasang pada slide yang dapat digerakkan, sehingga penyangga dapat bergerak di sepanjang pemandu. Braket 5 digunakan untuk memasang mekanisme penguncian untuk penyangga, memungkinkannya dipasang dengan aman selama akselerasi dan deselerasi rotor seimbang.
Pegas datar untuk penyangga mesin Soft Bearing harus dibuat dari pegas daun atau baja paduan berkualitas tinggi. Penggunaan baja struktural biasa dengan kekuatan luluh yang rendah tidak disarankan, karena dapat menimbulkan deformasi residu di bawah beban statis dan dinamis selama pengoperasian, yang menyebabkan berkurangnya akurasi geometris alat berat dan bahkan hilangnya stabilitas penyangga.
3.1.4.2. Dukungan Mesin Bantalan Lunak dengan Suspensi pada Pegas Strip
Dalam mendesain pegas strip yang digunakan untuk suspensi penyangga, perhatian harus diberikan pada pemilihan ketebalan dan lebar strip pegas, yang di satu sisi harus tahan terhadap beban statis dan dinamis rotor pada penyangga, dan di sisi lain, harus mencegah kemungkinan getaran torsi suspensi penyangga, yang bermanifestasi sebagai run-out aksial.
Contoh implementasi struktural mesin penyeimbang yang menggunakan suspensi pegas strip ditunjukkan pada Gambar 2.1 - 2.5 (lihat bagian 2.1), serta pada Gambar 3.7 dan 3.8 di bagian ini.

Gambar 3.7. Mesin untuk menyeimbangkan rotor motor listrik, dirakit, dikembangkan oleh A. Mokhov.

Gambar 3.8. Mesin untuk menyeimbangkan rotor turbopump, Dikembangkan oleh G. Glazov (Bishkek)
3.1.4.3. Penyangga Mesin Bantalan Lunak yang Dibuat Menggunakan Pegas Silinder
Contoh mesin penyeimbang Bantalan Lunak, di mana pegas kompresi silinder digunakan dalam desain penyangga, ditunjukkan pada Gambar 3.9. Kelemahan utama dari solusi desain ini terkait dengan berbagai tingkat deformasi pegas di penyangga depan dan belakang, yang terjadi jika beban pada penyangga tidak sama selama penyeimbangan rotor asimetris. Hal ini secara alami menyebabkan ketidaksejajaran penyangga dan kemiringan sumbu rotor pada bidang vertikal. Salah satu konsekuensi negatif dari cacat ini adalah munculnya gaya yang menyebabkan rotor bergeser secara aksial selama rotasi.

Gbr. 3.9. Varian Konstruksi Penyangga Bantalan Lunak untuk Mesin Penyeimbang yang Menggunakan Pegas Silinder.
3.1.4.4. Penyangga Bantalan Keras untuk Mesin Seperti yang ditunjukkan oleh pengalaman kami yang luas dengan klien, sebagian besar produsen penyeimbang buatan sendiri baru-baru ini mulai lebih memilih mesin bantalan keras dengan penyangga yang kaku. Pada bagian 2.2, Gambar 2.16 - 2.18 menggambarkan foto-foto berbagai desain struktural mesin yang menggunakan penyangga seperti itu. Sketsa tipikal penyangga kaku, yang dikembangkan oleh salah satu klien kami untuk konstruksi mesin mereka, disajikan pada Gbr. 3.10. Penyangga ini terdiri dari pelat baja datar dengan alur berbentuk P, yang secara konvensional membagi penyangga menjadi bagian yang "kaku" dan "fleksibel". Di bawah pengaruh gaya ketidakseimbangan, bagian penyangga yang "fleksibel" dapat berubah bentuk relatif terhadap bagian yang "kaku". Besarnya deformasi ini, ditentukan oleh ketebalan penyangga, kedalaman alur, dan lebar jembatan yang menghubungkan bagian penyangga yang "fleksibel" dan "kaku", dapat diukur dengan menggunakan sensor yang sesuai pada sistem pengukuran alat berat. Karena kurangnya metode untuk menghitung kekakuan melintang dari penyangga tersebut, dengan mempertimbangkan kedalaman h dari alur berbentuk P, lebar t jembatan, serta ketebalan penyangga r (lihat Gbr. 3.10), parameter desain ini biasanya ditentukan secara eksperimental oleh pengembang.
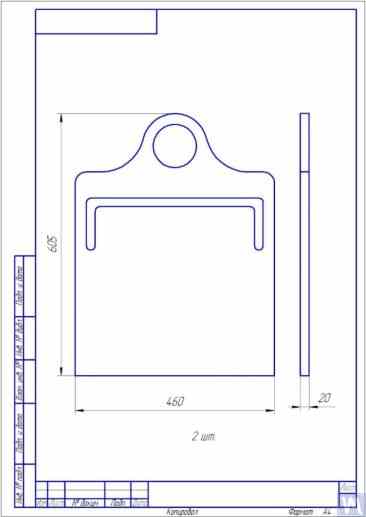
Gbr. 3.10. Sketsa Penyangga Bantalan Keras untuk Mesin Penyeimbang
Foto-foto yang menampilkan berbagai implementasi penyangga tersebut, yang dibuat untuk mesin klien kami sendiri, disajikan pada Gambar 3.11 dan 3.12. Dengan meringkas data yang diperoleh dari beberapa klien kami yang merupakan produsen mesin, persyaratan untuk ketebalan penyangga, yang ditetapkan untuk mesin dengan berbagai ukuran dan kapasitas beban, dapat dirumuskan. Misalnya, untuk mesin yang dimaksudkan untuk menyeimbangkan rotor dengan berat 0,1 hingga 50-100 kg, ketebalan penyangga mungkin 20 mm.

Gbr. 3.11. Penyangga Bantalan Keras untuk Mesin Penyeimbang, Diproduksi oleh A. Sinitsyn

Gbr. 3.12. Dukungan Bantalan Keras untuk Mesin Penyeimbang, Diproduksi oleh D. Krasilnikov
Untuk mesin dengan massa rotor seimbang yang tidak melebihi 300 - 500 kg, ketebalan penyangga dapat ditingkatkan hingga 30 - 40 mm, dan untuk mesin yang dirancang untuk menyeimbangkan rotor dengan massa maksimum berkisar antara 1000 hingga 3000 kg, ketebalan penyangga dapat mencapai 50 - 60 mm atau lebih. Seperti yang ditunjukkan oleh analisis karakteristik dinamis dari penyangga yang disebutkan di atas, frekuensi getaran alami mereka, yang diukur pada bidang melintang (bidang pengukuran deformasi relatif dari bagian yang "fleksibel" dan "kaku"), biasanya melebihi 100 Hz atau lebih. Frekuensi getaran alami penyangga Hard Bearing yang berdiri di bidang frontal, diukur pada arah yang bertepatan dengan sumbu rotasi rotor yang seimbang, biasanya jauh lebih rendah. Dan frekuensi inilah yang harus dipertimbangkan terutama saat menentukan batas atas rentang frekuensi operasi untuk rotor berputar yang seimbang pada mesin. Seperti disebutkan di atas, penentuan frekuensi ini dapat dilakukan dengan metode eksitasi tumbukan yang dijelaskan di bagian 3.1.
3.2. Rakitan Pendukung Mesin Penyeimbang 3.2.1. Jenis Utama Rakitan Pendukung Dalam pembuatan mesin penyeimbang Hard Bearing dan Soft Bearing, jenis rakitan pendukung yang terkenal berikut ini, yang digunakan untuk pemasangan dan rotasi rotor yang seimbang pada penyangga, dapat direkomendasikan, termasuk:

3.13. Varian Eksekusi Rakitan Pendukung Prismatik, Digunakan pada Mesin Penyeimbang untuk Turbin Mobil
Rakitan pendukung serupa (lihat Gambar 3.8 di atas) diimplementasikan, misalnya, oleh G. Glazov dalam mesinnya, juga dimaksudkan untuk menyeimbangkan turbin mobil. Solusi teknis asli dari rakitan pendukung prismatik, terbuat dari fluoroplastik (lihat Gambar 3.14), diusulkan oleh LLC "Technobalance".

Gbr. 3.14. Perakitan Penyangga Prismatik oleh LLC "Technobalance"
Rakitan penyangga khusus ini dibentuk dengan menggunakan dua selongsong silinder 1 dan 2, dipasang pada sudut satu sama lain dan dipasang pada sumbu penyangga. Rotor yang seimbang menyentuh permukaan selongsong di sepanjang garis pembangkit silinder, yang meminimalkan area kontak antara poros rotor dan penyangga, sehingga mengurangi gaya gesekan pada penyangga. Jika perlu, jika terjadi keausan atau kerusakan pada permukaan penyangga di area kontaknya dengan poros rotor, kemungkinan kompensasi keausan disediakan dengan memutar selongsong di sekitar porosnya pada suatu sudut. Perlu dicatat bahwa ketika menggunakan rakitan pendukung yang terbuat dari bahan non-logam, perlu disediakan kemungkinan struktural untuk membumikan rotor yang seimbang ke bodi alat berat, yang menghilangkan risiko muatan listrik statis yang kuat yang terjadi selama operasi. Hal ini, pertama, membantu mengurangi gangguan dan interferensi listrik yang dapat memengaruhi kinerja sistem pengukuran alat berat, dan kedua, menghilangkan risiko personel terpengaruh oleh aksi listrik statis.
3.2.1.2. Rakitan Pendukung Rol Rakitan ini biasanya dipasang pada penyangga mesin yang dirancang untuk menyeimbangkan rotor dengan massa melebihi 50 kilogram atau lebih. Penggunaannya secara signifikan mengurangi gaya gesekan pada penyangga dibandingkan dengan penyangga prismatik, sehingga memudahkan rotasi rotor yang seimbang. Sebagai contoh, Gambar 3.15 menunjukkan varian desain rakitan penyangga di mana rol digunakan untuk pemosisian produk. Dalam desain ini, bantalan gelinding standar digunakan sebagai rol 1 dan 2, cincin luarnya berputar pada sumbu stasioner yang dipasang di badan penyangga mesin 3. Gambar 3.16 menggambarkan sketsa desain yang lebih kompleks dari rakitan penyangga rol yang diimplementasikan dalam proyek mereka oleh salah satu produsen mesin penyeimbang buatan sendiri. Seperti yang terlihat dari gambar, untuk meningkatkan kapasitas beban roller (dan akibatnya rakitan pendukung secara keseluruhan), sepasang bantalan gelinding 1 dan 2 dipasang di badan roller 3. Implementasi praktis dari desain ini, terlepas dari semua keuntungannya yang jelas, tampaknya merupakan tugas yang agak rumit, terkait dengan kebutuhan untuk fabrikasi independen dari bodi roller 3, yang memerlukan persyaratan yang sangat tinggi untuk akurasi geometris dan karakteristik mekanis material.

Gbr. 3.15. Contoh Desain Rakitan Penyangga Rol
Gbr. 3.16. Contoh Desain Rakitan Penyangga Rol dengan Dua Bantalan Gelinding
Gambar 3.17 menyajikan varian desain rakitan penyangga rol penyelarasan otomatis yang dikembangkan oleh spesialis LLC "Technobalance". Dalam desain ini, kemampuan menyelaraskan diri dari rol dicapai dengan memberikan dua derajat kebebasan tambahan, yang memungkinkan rol membuat gerakan sudut kecil di sekitar sumbu X dan Y. Rakitan pendukung seperti itu, yang memastikan presisi tinggi dalam pemasangan rotor yang seimbang, biasanya direkomendasikan untuk digunakan pada penyangga mesin penyeimbang yang berat.

Gbr. 3.17. Contoh Desain Rakitan Penyangga Rol Penyelarasan Sendiri
Seperti yang disebutkan sebelumnya, rakitan penyangga rol biasanya memiliki persyaratan yang cukup tinggi untuk pembuatan dan kekakuan yang presisi. Khususnya, toleransi yang ditetapkan untuk runout radial rol tidak boleh melebihi 3-5 mikron.
Dalam praktiknya, hal ini tidak selalu tercapai bahkan oleh produsen terkenal sekalipun. Sebagai contoh, selama pengujian penulis terhadap runout radial dari satu set rakitan penyangga rol baru, yang dibeli sebagai suku cadang untuk mesin penyeimbang model H8V, merek "K. Shenk", runout radial rolnya mencapai 10-11 mikron.
3.2.1.3. Rakitan Pendukung Spindel
Saat menyeimbangkan rotor dengan pemasangan flensa (misalnya, poros cardan) pada mesin penyeimbang, spindel digunakan sebagai rakitan pendukung untuk pemosisian, pemasangan, dan rotasi produk yang diseimbangkan.
Spindel adalah salah satu komponen mesin balancing yang paling kompleks dan penting, yang sebagian besar bertanggung jawab untuk mencapai kualitas balancing yang diperlukan.
Teori dan praktik perancangan dan pembuatan spindel telah berkembang dengan baik dan tercermin dalam berbagai publikasi, di antaranya adalah monograf "Detail dan Mekanisme Peralatan Mesin Pemotong Logam" [1], yang diedit oleh Dr. D.N. Reshetov, merupakan yang paling berguna dan dapat diakses oleh para pengembang.
Di antara persyaratan utama yang harus dipertimbangkan dalam desain dan pembuatan spindel mesin balancing, berikut ini adalah yang harus diprioritaskan:
a) Memberikan kekakuan tinggi pada struktur rakitan spindel yang cukup untuk mencegah deformasi yang tidak dapat diterima yang mungkin terjadi di bawah pengaruh gaya yang tidak seimbang dari rotor seimbang;
b) Memastikan kestabilan posisi sumbu rotasi spindel, yang ditandai dengan nilai yang diizinkan untuk runout radial, aksial, dan aksial spindel;
c) Memastikan ketahanan aus yang tepat pada jurnal spindel, serta tempat duduk dan permukaan pendukungnya yang digunakan untuk memasang produk yang seimbang.
Implementasi praktis dari persyaratan ini dirinci dalam Bagian VI "Spindel dan Pendukungnya" dari pekerjaan [1].
Secara khusus, ada metodologi untuk memverifikasi kekakuan dan akurasi rotasi spindel, rekomendasi untuk memilih bantalan, memilih material spindel dan metode pengerasannya, serta banyak informasi berguna lainnya tentang topik ini.
Work [1] mencatat bahwa dalam desain spindel untuk sebagian besar jenis peralatan mesin pemotong logam, skema dua-bantalan terutama digunakan.
Contoh varian desain dari skema dua-bantalan yang digunakan pada spindel mesin frais (detailnya dapat dilihat pada karya [1]) ditunjukkan pada Gbr. 3.18.
Skema ini sangat cocok untuk pembuatan spindel mesin balancing, contoh varian desainnya ditunjukkan di bawah ini pada Gambar 3.19-3.22.
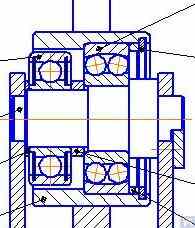
Gambar 3.19 menunjukkan salah satu varian desain rakitan spindel terdepan dari mesin penyeimbang, yang berputar pada dua bantalan dorong radial, yang masing-masing memiliki rumah 1 dan 2 yang independen. Flensa 4, yang dimaksudkan untuk pemasangan flensa poros cardan, dan katrol 5, yang digunakan untuk mentransmisikan rotasi ke spindel dari motor listrik menggunakan penggerak sabuk-V, dipasang pada poros spindel 3.
Gbr. 3.18. Sketsa Spindel Mesin Frais Dua-Bantalan

Gambar 3.19. Contoh Desain Spindel pada Dua Penyangga Bantalan Independen
Gambar 3.20 dan 3.21 menunjukkan dua desain rakitan spindel terkemuka yang terkait erat. Dalam kedua kasus tersebut, bantalan spindel dipasang di rumah umum 1, yang memiliki lubang aksial tembus yang diperlukan untuk memasang poros spindel. Di pintu masuk dan keluar lubang ini, rumah memiliki lubang khusus (tidak ditunjukkan pada gambar), yang dirancang untuk mengakomodasi bantalan dorong radial (roller atau bola) dan penutup flensa khusus 5, yang digunakan untuk mengamankan cincin luar bantalan.
Seperti pada versi sebelumnya (lihat Gbr. 3.19), pelat muka 2 dipasang pada poros spindel, yang dimaksudkan untuk pemasangan flens pada poros penggerak, dan katrol 3, yang digunakan untuk mentransmisikan rotasi ke spindel dari motor listrik melalui penggerak sabuk. Tungkai 4 juga dipasang pada poros spindel, yang digunakan untuk menentukan posisi sudut spindel, yang digunakan ketika memasang beban uji dan korektif pada rotor selama penyeimbangan.

Gambar 3.20. Contoh 1 Desain Spindel Terkemuka pada Dua Penyangga Bantalan yang Dipasang di Rumah Umum

Gambar 3.21. Contoh 2 Desain Spindel Terkemuka pada Dua Penyangga Bantalan yang Dipasang di Rumah Umum
 \
\
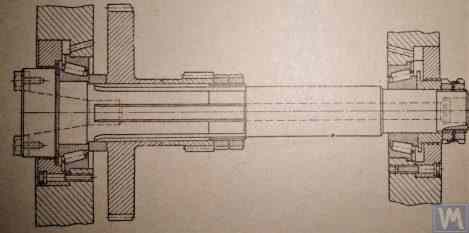
Gambar 3.22. Contoh Desain Spindel yang Digerakkan (Belakang)
Gambar 3.22 menunjukkan varian desain rakitan spindel yang digerakkan (belakang) dari sebuah mesin, yang berbeda dari spindel utama hanya dengan tidak adanya katrol penggerak dan dahan, karena tidak diperlukan.
Seperti yang terlihat di Gambar 3.20 - 3.22Rakitan spindel yang dibahas di atas dipasang pada penyangga Soft Bearing dari mesin balancing dengan menggunakan klem khusus (tali) 6. Metode pemasangan lainnya juga dapat digunakan jika perlu, untuk memastikan kekakuan dan presisi yang tepat dalam memposisikan rakitan spindel pada penyangga.
Gambar 3.23 mengilustrasikan desain pemasangan flens yang mirip dengan spindel tersebut, yang dapat digunakan untuk pemasangannya pada penyangga Hard Bearing pada mesin penyeimbang.

Gambar 3.22. Contoh Eksekusi Desain Spindel yang Digerakkan (Belakang)
Gambar 3.22 menyajikan varian desain rakitan spindel yang digerakkan (belakang) dari mesin, yang hanya berbeda dari spindel utama karena tidak memiliki katrol penggerak dan dahan karena tidak diperlukan.
Seperti yang terlihat di Gambar 3.20 - 3.22rakitan spindel yang dibahas dipasang pada penyangga Soft Bearing dari mesin penyeimbang dengan menggunakan klem khusus (tali) 6. Jika perlu, metode pemasangan lain yang memberikan kekakuan dan akurasi yang tepat untuk memposisikan rakitan spindel pada penyangga juga dapat digunakan.
Gambar 3.23 menunjukkan desain pemasangan flens untuk spindel tersebut, yang dapat digunakan untuk pemasangannya pada penyangga Hard Bearing dari mesin penyeimbang.
3.1.4.3. Penyangga Mesin Bantalan Lunak yang Dibuat Menggunakan Pegas Silinder
Contoh mesin penyeimbang Soft Bearing, di mana pegas kompresi silinder digunakan dalam desain penyangga, ditunjukkan pada Gambar 3.9. Kerugian utama dari solusi desain ini terkait dengan jumlah deformasi pegas yang berbeda pada penyangga depan dan belakang, yang terjadi pada kasus beban yang tidak sama pada penyangga ketika menyeimbangkan rotor asimetris. Hal ini secara alami menyebabkan ketidaksejajaran penyangga dan kemiringan sumbu rotor pada bidang vertikal. Salah satu konsekuensi negatif dari cacat ini adalah terjadinya gaya yang menyebabkan rotor bergeser secara aksial selama rotasi.
Gambar 3.24. Skema Perhitungan yang Digunakan untuk Menentukan Kekakuan Spindel dan Runout Radialnya (3.4)
Y=P∗ + 1jB * (c+g)2+jB/jAc² ], ara (3.4)
dimana:
Dengan mengubah rumus 3.4, nilai yang dihitung yang diinginkan dari kekakuan rakitan spindel jшп dapat ditentukan: jшп = P / Y, kg / cm (3.5)
Dengan mempertimbangkan rekomendasi pekerjaan [1] untuk mesin balancing berukuran sedang, nilai ini tidak boleh di bawah 50 kg/µm.
Telah dicatat sebelumnya bahwa pengaruh utama pada kekakuan radial rakitan spindel diberikan oleh diameter porosnya, dengan peningkatan momen inersia J1 dan J2 yang meningkat secara kuadratik, dan karenanya (lihat persamaan 3.4) jumlah perpindahan elastis Y spindel di bawah beban berkurang.
Seperti yang terlihat dari persamaan 3.4, kekakuan spindel juga dipengaruhi oleh jarak antar penyangga c dan panjang konsolnya gyang dioptimalkan selama desain juga secara signifikan meningkatkan kualitas rakitan spindel.
Perlu dicatat bahwa ketika mendesain spindel, perhatian juga harus diberikan untuk memastikan kekakuan aksialnya, yang terutama bergantung pada kekakuan aksial bantalan spindel dan kekakuan rumahannya.
Frekuensi inheren getaran spindel, yang tidak boleh di bawah 500 - 600 Hz, secara langsung terkait dengan kekakuan rakitan spindel. Parameter ini dapat ditentukan secara eksperimental dengan menggunakan perangkat seri "Balanset" dengan menggunakan metode eksitasi tumbukan yang telah dibahas sebelumnya di bagian 3.1.3.1.
Mengingat bahwa menentukan parameter rakitan spindel menghadirkan tantangan yang signifikan bagi banyak pengembang, mereka disarankan untuk menggunakan metode perhitungan grafis yang disajikan dalam karya [1] dan [2], berdasarkan penggunaan nomogram, yang secara signifikan menyederhanakan solusi tugas ini dan mengurangi waktu yang diperlukan untuk menyelesaikannya.
3.2.1.3.4. Memastikan Persyaratan Akurasi untuk Rotasi Spindel
Akurasi rotasi, bersama dengan kekakuan yang dibahas di atas, merupakan karakteristik penting dari perakitan spindel mesin balancing, yang secara signifikan dapat memengaruhi kualitas balancing. Praktik menunjukkan bahwa akurasi rotasi spindel secara langsung bergantung pada beberapa faktor, termasuk:
Pertama, produsen harus fokus pada ketepatan bantalan yang mereka gunakan, karena dampaknya pada akurasi rotasi (runout radial) dari spindel dua-bantalan (lihat skema perhitungan di Gambar 3.24) dapat diperkirakan dengan perhitungan verifikasi yang dilakukan dengan menggunakan rumus 3.5.
Δ = ∆B + gc * (∆B + ∆A) (3.5)
dimana:
3.2.1.3.5. Memastikan Persyaratan Keseimbangan Spindel
Rakitan spindel dari mesin penyeimbang harus diseimbangkan dengan baik, karena ketidakseimbangan yang sebenarnya akan berpindah ke rotor yang sedang diseimbangkan sebagai kesalahan tambahan. Ketika menetapkan toleransi teknologi untuk ketidakseimbangan sisa spindel, umumnya disarankan agar kelas presisi penyeimbangannya setidaknya 1 - 2 kelas lebih tinggi daripada produk yang diseimbangkan pada mesin.
Dengan mempertimbangkan fitur desain spindel yang dibahas di atas, penyeimbangannya harus dilakukan dalam dua bidang.
3.2.1.3.6. Memastikan Kapasitas Beban Bantalan dan Persyaratan Daya Tahan untuk Bantalan Spindel
Saat mendesain spindel dan memilih ukuran bantalan, disarankan untuk menilai terlebih dahulu daya tahan dan kapasitas beban bantalan. Metodologi untuk melakukan perhitungan ini dapat dirinci dalam ISO 18855-94 (ISO 281-89) "Bantalan Gelinding - Peringkat Beban Dinamis dan Umur Rating" [3], serta dalam berbagai buku pegangan bantalan gelinding (termasuk digital).
3.2.1.3.7. Memastikan Persyaratan untuk Pemanasan yang Dapat Diterima pada Bantalan Spindel
Menurut rekomendasi dari pekerjaan [1], pemanasan maksimum yang diizinkan pada cincin luar bantalan spindel tidak boleh melebihi 70°C. Namun, untuk memastikan penyeimbangan berkualitas tinggi, pemanasan cincin luar yang direkomendasikan tidak boleh melebihi 40 - 45°C.
3.2.1.3.8. Memilih Jenis Penggerak Sabuk dan Desain Katrol Penggerak untuk Spindel
Saat merancang spindel penggerak mesin penyeimbang, disarankan untuk memastikan putarannya menggunakan penggerak sabuk datar. Contoh penggunaan yang tepat dari penggerak semacam itu untuk operasi spindel disajikan dalam Gambar 3.20 dan 3.23. Menggunakan v-belt atau sabuk bergigi tidak diinginkan, karena mereka dapat menerapkan beban dinamis tambahan ke spindel karena ketidakakuratan geometris pada sabuk dan katrol, yang pada gilirannya dapat menyebabkan kesalahan pengukuran tambahan selama penyeimbangan. Persyaratan yang direkomendasikan untuk katrol untuk sabuk penggerak datar diuraikan dalam ISO 17383- 73 "Katrol untuk sabuk penggerak datar" [4].
Katrol penggerak harus diposisikan di ujung belakang spindel, sedekat mungkin dengan rakitan bantalan (dengan overhang seminimal mungkin). Keputusan desain untuk penempatan katrol yang menjorok, dibuat dalam pembuatan spindel yang ditunjukkan pada Gambar 3.19dapat dianggap tidak berhasil, karena secara signifikan meningkatkan momen beban penggerak dinamis yang bekerja pada penyangga spindel.
Kelemahan lain yang signifikan dari desain ini adalah penggunaan v-belt drive, ketidakakuratan manufaktur dan perakitan yang juga dapat menjadi sumber beban tambahan yang tidak diinginkan pada spindel.
3.3. Tempat Tidur (Rangka)
Ranjang adalah struktur pendukung utama mesin balancing, yang menjadi dasar elemen-elemen utamanya, termasuk tiang penyangga dan motor penggerak. Saat memilih atau membuat alas mesin penyeimbang, penting untuk memastikan bahwa alas tersebut memenuhi beberapa persyaratan, termasuk kekakuan yang diperlukan, presisi geometris, ketahanan getaran, dan ketahanan aus pada pemandunya.
Praktik menunjukkan bahwa ketika membuat mesin untuk kebutuhan mereka sendiri, opsi tempat tidur berikut ini yang paling sering digunakan:
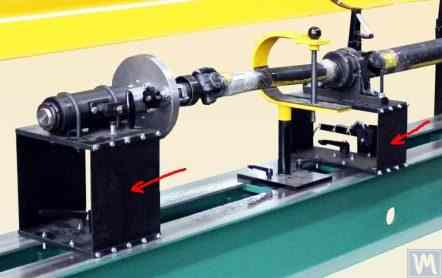
Gambar 3.25 menunjukkan alas mesin pertukangan yang berhasil digunakan dalam pembuatan mesin yang dirancang untuk menyeimbangkan poros cardan.

Gambar 3.25. Contoh Penggunaan Tempat Tidur Mesin Pertukangan Kayu Bekas untuk Pembuatan Mesin Penyeimbang Poros Cardan.
Gambar 3.26 dan 3.27 menunjukkan contoh penggunaan alas bubut, berdasarkan mesin Hard Bearing khusus untuk menyeimbangkan auger dan mesin penyeimbang Soft Bearing universal untuk rotor silinder yang diproduksi. Untuk produsen DIY, solusi semacam itu memungkinkan untuk membuat sistem pendukung yang kaku untuk mesin penyeimbang dengan waktu dan biaya minimal, di mana dudukan penyangga dari berbagai jenis (baik Hard Bearing dan Soft Bearing) dapat dipasang. Tugas utama pabrikan dalam hal ini adalah memastikan (dan memulihkan jika perlu) presisi geometris dari pemandu mesin yang menjadi dasar penyangga. Dalam kondisi produksi DIY, pengikisan halus biasanya digunakan untuk mengembalikan akurasi geometris pemandu yang diperlukan.

Gambar 3.26. Contoh Penggunaan Bed Mesin Bubut Bekas untuk Pembuatan Mesin Bantalan Keras untuk Menyeimbangkan Auger.

Gambar 3.27. Contoh Penggunaan Bed Mesin Bubut Bekas untuk Pembuatan Mesin Bantalan Lunak untuk Poros Penyeimbang.
Gambar 3.28 menunjukkan versi tempat tidur rakitan yang dibuat dari dua saluran. Dalam pembuatan ranjang ini, koneksi baut yang dapat dilepas digunakan, sehingga memungkinkan deformasi ranjang diminimalkan atau dihilangkan sama sekali selama perakitan tanpa operasi teknologi tambahan. Untuk memastikan akurasi geometris yang tepat dari pemandu alas yang ditentukan, pemrosesan mekanis (penggerindaan, penggilingan halus) flensa atas saluran yang digunakan mungkin diperlukan.

Gambar 3.28. Contoh Pembuatan Tempat Tidur Rakitan dari Saluran
Gambar 3.29 dan 3.30 menyajikan variasi alas las, juga dibuat dari dua saluran. Teknologi manufaktur untuk alas tersebut mungkin memerlukan serangkaian operasi tambahan, seperti perlakuan panas untuk mengurangi tekanan internal yang terjadi selama pengelasan. Seperti halnya alas rakitan, untuk memastikan akurasi geometris yang tepat dari pemandu alas las, pemrosesan mekanis (penggerindaan, penggilingan halus) flensa atas saluran yang digunakan harus direncanakan.

Gambar 3.29. Contoh Pembuatan Tempat Tidur yang Dilas dari Saluran
Gambar 3.30. Contoh Pembuatan Tempat Tidur yang Dilas dari Saluran
Baru-baru ini, tempat tidur yang terbuat dari beton polimer dengan lapisan peredam getaran telah banyak digunakan. Teknologi untuk membuat tempat tidur ini dijelaskan dengan baik secara online dan dapat dengan mudah diimplementasikan oleh produsen DIY. Karena kesederhanaan relatif dan biaya produksi yang rendah, ranjang ini memiliki beberapa keunggulan utama dibandingkan ranjang logam:
Biasanya, ketika membuat alas seperti itu, bagian atasnya diperkuat dengan sisipan baja yang digunakan sebagai pemandu yang menjadi dasar penyangga mesin penyeimbang. Sebagai contoh, Gambar 3.31 menunjukkan foto mesin untuk menyeimbangkan poros cardan, yang diproduksi oleh LLC "Technobalance", yang alas tidurnya terbuat dari beton polimer.

Gambar 3.31. Contoh Tempat Tidur Mesin Balancing yang Terbuat dari Beton Polimer
3.4. Drive untuk Mesin Penyeimbang
Seperti yang ditunjukkan oleh analisis solusi desain yang digunakan oleh klien kami dalam pembuatan mesin penyeimbang, mereka terutama berfokus pada penggunaan motor AC yang dilengkapi dengan penggerak frekuensi variabel selama desain penggerak. Pendekatan ini memungkinkan berbagai kecepatan putaran yang dapat disesuaikan untuk rotor yang seimbang dengan biaya minimal. Kekuatan motor penggerak utama yang digunakan untuk memutar rotor seimbang biasanya dipilih berdasarkan massa rotor ini dan dapat diperkirakan:
Motor-motor ini harus dipasang dengan kuat pada alas mesin atau fondasinya. Sebelum pemasangan pada mesin (atau di lokasi pemasangan), motor penggerak utama, bersama dengan katrol yang dipasang pada poros keluarannya, harus diseimbangkan dengan hati-hati. Untuk mengurangi gangguan elektromagnetik yang disebabkan oleh penggerak frekuensi variabel, disarankan untuk memasang filter jaringan pada input dan outputnya. Filter ini dapat berupa produk standar yang disediakan oleh produsen drive atau filter buatan sendiri yang dibuat dengan menggunakan cincin ferit.