






3. Requisitos para a construção de unidades básicas e mecanismos de máquinas de equilibrar 3.1. Rolamentos 3.1.1. Fundamentos teóricos do projeto de rolamentos
Na secção anterior, foram discutidas em pormenor as principais execuções do projeto de suportes de rolamentos macios e de rolamentos duros para máquinas de equilibragem. Um parâmetro crucial que os projectistas devem considerar ao conceber e fabricar estes apoios é a sua frequência natural de oscilação. Isto é importante porque a medição não só da amplitude de vibração (deformação cíclica) dos apoios, mas também da fase de vibração, é necessária para calcular os parâmetros dos pesos correctivos pelos sistemas de medição e computação da máquina.
Se a frequência natural de um suporte coincidir com a frequência de rotação do rotor equilibrado (ressonância do suporte), a medição exacta da amplitude e da fase da vibração é praticamente impossível. Este facto é claramente ilustrado nos gráficos que mostram as variações de amplitude e de fase das oscilações do suporte em função da frequência de rotação do rotor equilibrado (ver fig. 3.1).
Destes gráficos resulta que, à medida que a frequência de rotação do rotor equilibrado se aproxima da frequência natural das oscilações do suporte (ou seja, quando a relação fp/fo é próxima de 1), há um aumento significativo da amplitude associada às oscilações de ressonância do suporte (ver fig. 3.1.a). Simultaneamente, o gráfico 3.1.b mostra que, na zona de ressonância, se regista uma alteração acentuada do ângulo de fase ∆F°, que pode atingir 180°.
Por outras palavras, ao equilibrar qualquer mecanismo na zona de ressonância, mesmo pequenas alterações na sua frequência de rotação podem levar a uma instabilidade significativa nos resultados da medição da amplitude e da fase da sua vibração, conduzindo a erros no cálculo dos parâmetros dos pesos correctivos e afectando negativamente a qualidade da equilibragem.
Os gráficos acima confirmam as recomendações anteriores de que, para as máquinas com chumaceiras rígidas, o limite superior das frequências de funcionamento do rotor deve ser (pelo menos) 2-3 vezes inferior à frequência natural do suporte, fo. Para as máquinas de rolamentos macios, o limite inferior das frequências de funcionamento admissíveis do rotor equilibrado deve ser (pelo menos) 2-3 vezes superior à frequência natural do suporte.
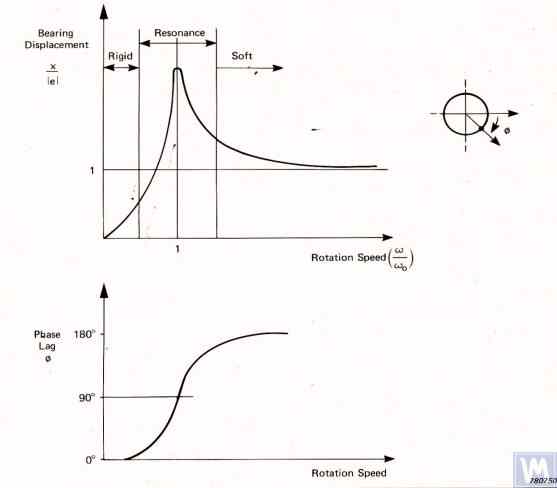
Figura 3.1. Gráficos que mostram as variações da amplitude relativa e da fase das vibrações do suporte da máquina de equilibrar em função das variações da frequência de rotação.
Tendo em conta as informações apresentadas, não se recomenda o funcionamento da máquina na zona de ressonância dos seus apoios (assinalada a vermelho na Fig. 3.1). Os gráficos apresentados na Fig. 3.1 demonstram também que, para os mesmos desequilíbrios do rotor, as vibrações reais dos apoios da máquina com rolamentos macios são significativamente inferiores às que ocorrem nos apoios da máquina com rolamentos macios.
Daqui se conclui que os sensores utilizados para medir as vibrações dos apoios em máquinas com chumaceiras rígidas devem ter uma sensibilidade mais elevada do que os utilizados em máquinas com chumaceiras macias. Esta conclusão é bem suportada pela prática atual de utilização de sensores, que mostra que os sensores de vibração absolutos (vibro-acelerómetros e/ou sensores de velocidade vibratória), utilizados com sucesso em máquinas de equilibragem de chumaceiras macias, muitas vezes não conseguem atingir a qualidade de equilibragem necessária em máquinas de chumaceiras duras.
Nestas máquinas, recomenda-se a utilização de sensores de vibração relativa, tais como sensores de força ou sensores de deslocamento altamente sensíveis.
3.1.2. Estimativa das frequências naturais dos apoios através de métodos de cálculo
Um projetista pode efetuar um cálculo aproximado (estimativo) da frequência natural de um apoio fo utilizando a fórmula 3.1, tratando-o de forma simplista como um sistema vibratório com um grau de liberdade, que (ver Fig. 2.19.a) é representado por uma massa M, oscilando numa mola com rigidez K.
fo=2π1MK(3.1)
A massa M utilizada no cálculo para um rotor inter-rolamentos simétrico pode ser aproximada pela fórmula 3.2.
M=Mo+nMr(3.2) em que Mo é a massa da parte móvel do suporte em kg; Mr é a massa do rotor equilibrado em kg; n é o número de suportes da máquina envolvidos na equilibragem.
A rigidez K do suporte é calculada utilizando a fórmula 3.3 com base nos resultados de estudos experimentais que envolvem a medição da deformação ΔL do suporte quando este é carregado com uma força estática P (ver figuras 3.2.a e 3.2.b).
K=ΔLP(3.3) em que ΔL é a deformação do suporte em metros; P é a força estática em newtons.
A magnitude da força de carga P pode ser medida utilizando um instrumento de medição de forças (por exemplo, um dinamómetro). O deslocamento do suporte ΔL é determinado utilizando um dispositivo de medição de deslocamentos lineares (por exemplo, um relógio comparador).
3. Requisitos para a construção de unidades básicas e mecanismos de máquinas de equilibrar 3.1. Rolamentos 3.1.2. Cálculo de frequências naturais de apoios por métodos computacionais
Os cálculos das frequências naturais dos apoios utilizando o esquema de cálculo acima referido podem ser efectuados em duas direcções:
O cálculo das frequências naturais dos apoios na direção vertical requer a utilização de uma técnica de cálculo mais complexa, que (para além dos parâmetros do apoio e do próprio rotor equilibrado) deve ter em conta os parâmetros da estrutura e as especificidades da instalação da máquina na fundação. Este método não é abordado na presente publicação. A análise da fórmula 3.1 permite algumas recomendações simples que devem ser consideradas pelos projectistas de máquinas nas suas actividades práticas. Em particular, a frequência natural de um suporte pode ser alterada mudando a sua rigidez e/ou massa. O aumento da rigidez aumenta a frequência natural do apoio, enquanto o aumento da massa a diminui. Estas alterações têm uma relação não linear, inversa ao quadrado. Por exemplo, duplicar a rigidez do suporte aumenta a sua frequência natural apenas por um fator de 1,4. Da mesma forma, duplicar a massa da parte móvel do suporte reduz a sua frequência natural apenas por um fator de 1,4.
3.1.3. Métodos experimentais para a determinação das frequências naturais dos apoios
Dado que o cálculo acima referido das frequências naturais dos apoios, efectuado através de um método simplificado, pode conduzir a erros significativos, a maioria dos programadores amadores prefere determinar estes parâmetros por métodos experimentais. Para tal, utilizam as capacidades fornecidas pelos modernos sistemas de medição de vibrações das máquinas de equilibragem, incluindo os instrumentos da série "Balanset".
3.1.3.1. Determinação das frequências naturais dos apoios pelo método de excitação por impacto
O método de excitação por impacto é a forma mais simples e mais comum de determinar a frequência natural das vibrações de um suporte ou de qualquer outro componente de uma máquina. Baseia-se no facto de que quando um objeto, como uma campainha (ver Fig. 3.3), é excitado por impacto, a sua resposta manifesta-se como uma resposta vibratória que decai gradualmente. A frequência do sinal vibratório é determinada pelas características estruturais do objeto e corresponde à frequência das suas vibrações naturais. Para a excitação de vibrações por impacto, pode utilizar-se qualquer ferramenta pesada, como um martelo de borracha ou um martelo normal.
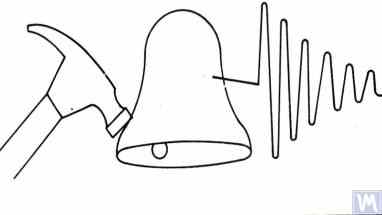
Figura 3.3. Diagrama de excitação de impacto utilizado para determinar as frequências naturais de um objeto
A massa do martelo deve ser aproximadamente igual a 10% da massa do objeto que está a ser excitado. Para captar a resposta vibratória, deve ser instalado um sensor de vibrações no objeto em análise, com o seu eixo de medição alinhado com a direção de excitação do impacto. Em alguns casos, um microfone de um dispositivo de medição de ruído pode ser utilizado como sensor para captar a resposta vibratória do objeto.
As vibrações do objeto são convertidas num sinal elétrico pelo sensor, que é depois enviado para um instrumento de medição, como a entrada de um analisador de espetro. Este instrumento regista a função temporal e o espetro do processo vibratório em decaimento (ver Fig. 3.4), cuja análise permite determinar a frequência (frequências) das vibrações naturais do objeto.
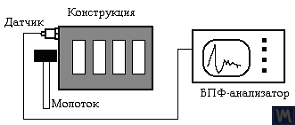
Figura 3.4. Diagrama de medição e registo das vibrações naturais de um objeto
Tal como a maioria dos instrumentos modernos de medição de vibrações, os sistemas de medição da série "Balanset" podem ser utilizados para determinar as frequências naturais de um objeto (por exemplo, suportes de uma máquina de equilibrar) quando as suas vibrações são excitadas por impacto. Este procedimento nos aparelhos da série "Balanset" pode ser efectuado no modo de funções adicionais do aparelho "Graphs. Spectrum" ou num modo especializado "Graphs. Impacto", que está incluído nas versões mais recentes do software "Balanset 1".
Como resultado deste procedimento, é apresentada no ecrã do computador uma janela de trabalho com gráficos da função temporal e do espetro de vibrações em decaimento, que ocorrem na estrutura examinada após a sua excitação por impacto. A Figura 3.5 apresenta um exemplo desses gráficos.

Figura 3.5. Interface do programa com gráficos de funções temporais e espetro de vibrações de impacto decrescentes da estrutura examinada
A análise do gráfico do espetro apresentado na Figura 3.5 (ver a parte inferior da janela de trabalho) mostra que a componente principal das vibrações naturais da estrutura examinada, determinada com referência ao eixo das abcissas do gráfico, ocorre a uma frequência de 9,5 Hz. Este método pode ser recomendado para o estudo das vibrações naturais de suportes de máquinas de equilibragem com rolamentos macios e com rolamentos duros.
3.1.3.2. Determinação das frequências naturais dos apoios em modo de litoral
Nalguns casos, as frequências naturais dos apoios podem ser determinadas através da medição cíclica da amplitude e da fase da vibração "em terra". Na implementação deste método, o rotor instalado na máquina examinada é inicialmente acelerado até à sua velocidade de rotação máxima, após o que o seu acionamento é desligado, e a frequência da força perturbadora associada ao desequilíbrio do rotor diminui gradualmente desde o máximo até ao ponto de paragem.
Neste caso, as frequências naturais dos apoios podem ser determinadas por duas características:
Nos dispositivos da série "Balanset", o modo "Vibrometer" ("Balanset 1") ou o modo "Balancing. Monitorização" ("Balanset 2C" e "Balanset 4") podem ser utilizados para detetar as frequências naturais de objectos "na costa", permitindo medições cíclicas da amplitude e da fase da vibração na frequência de rotação do rotor.
Além disso, o software "Balanset 1" inclui adicionalmente um modo especializado "Gráficos. Coasting", que permite traçar gráficos das alterações da amplitude e da fase das vibrações do apoio na costa em função da alteração da frequência de rotação, facilitando significativamente o processo de diagnóstico de ressonâncias.
Note-se que, por razões óbvias (ver secção 3.1.1), o método de identificação das frequências naturais dos apoios na costa só pode ser utilizado no caso do estudo de máquinas de equilibragem de rolamentos macios, em que as frequências de trabalho de rotação do rotor excedem significativamente as frequências naturais dos apoios na direção transversal.
No caso das máquinas de rolamentos rígidos, em que as frequências de trabalho da rotação do rotor que excitam as vibrações dos apoios na costa são significativamente inferiores às frequências naturais dos apoios, a utilização deste método é praticamente impossível.
3.1.4. Recomendações práticas para a conceção e fabrico de suportes para máquinas de equilibrar 3.1.4.1. Máquinas de rolamentos macios com molas de prato plano
Na secção 2.1, foram analisadas diversas variantes de conceção de suportes de máquinas de equilibragem fabricados com molas planas, ilustradas nas figuras 2.7 a 2.9. De acordo com as nossas informações, estas concepções são mais frequentemente utilizadas em máquinas destinadas à equilibragem de veios de transmissão.
Como exemplo, consideremos os parâmetros da mola utilizados por um dos nossos clientes (LLC "Rost-Service", São Petersburgo) no fabrico dos seus próprios suportes de máquinas. Esta máquina destinava-se a equilibrar veios de transmissão de 2, 3 e 4 apoios, com uma massa não superior a 200 kg. As dimensões geométricas das molas (altura * largura * espessura) utilizadas nos suportes dos fusos de avanço e de tração da máquina, escolhidas pelo cliente, eram respetivamente 3002003 mm.
A frequência natural do suporte sem carga, determinada experimentalmente pelo método de excitação por impacto utilizando o sistema de medição padrão da máquina "Balanset 4", foi de 11 - 12 Hz. Com esta frequência natural de vibração dos apoios, a frequência de rotação recomendada para o rotor equilibrado durante a equilibragem não deve ser inferior a 22-24 Hz (1320 - 1440 RPM).
As dimensões geométricas das molas planas utilizadas pelo mesmo fabricante nos suportes intermédios eram, respetivamente, 2002003 mm. Além disso, como os estudos demonstraram, as frequências naturais destes suportes eram mais elevadas, atingindo 13-14 Hz.
Com base nos resultados dos ensaios, os fabricantes da máquina foram aconselhados a alinhar (igualar) as frequências naturais do fuso e dos apoios intermédios. Isto deverá facilitar a seleção da gama de frequências de rotação operacionais dos veios de transmissão durante a equilibragem e evitar potenciais instabilidades das leituras do sistema de medição devido à entrada dos apoios na zona de vibrações ressonantes.
Os métodos para ajustar as frequências naturais de vibração dos apoios em molas planas são óbvios. Este ajustamento pode ser conseguido através da alteração das dimensões geométricas ou da forma das molas planas, o que é conseguido, por exemplo, através da fresagem de ranhuras longitudinais ou transversais que reduzem a sua rigidez.
Como já foi referido, a verificação dos resultados deste ajustamento pode ser efectuada através da identificação das frequências naturais de vibração dos apoios, utilizando os métodos descritos nos pontos 3.1.3.1 e 3.1.3.2.
Figura 3.6 apresenta uma versão clássica da conceção do suporte sobre molas planas, utilizada numa das suas máquinas por A. Sinitsyn. Como mostra a figura, o suporte inclui os seguintes componentes:

Figura 3.6. Variação do dimensionamento de um apoio sobre molas planas
A placa superior 1 do suporte pode ser utilizada para montar o fuso ou um rolamento intermédio. Consoante a finalidade do suporte, a placa inferior 4 pode ser fixada rigidamente às guias da máquina ou instalada em corrediças móveis, permitindo que o suporte se desloque ao longo das guias. O suporte 5 é utilizado para instalar um mecanismo de bloqueio do suporte, permitindo a sua fixação segura durante a aceleração e a desaceleração do rotor equilibrado.
As molas planas para os suportes das máquinas Soft Bearing devem ser fabricadas com molas de lâmina ou com aço ligado de alta qualidade. Não é aconselhável a utilização de aços estruturais comuns com um baixo limite de elasticidade, uma vez que podem desenvolver deformações residuais sob cargas estáticas e dinâmicas durante o funcionamento, levando a uma redução da precisão geométrica da máquina e até à perda de estabilidade do suporte.
3.1.4.2. Suportes de máquinas de rolamentos macios com suspensão em molas de faixa
Na conceção de molas de lâmina utilizadas em suspensões de apoio, deve prestar-se atenção à seleção da espessura e da largura da lâmina da mola, que, por um lado, deve suportar a carga estática e dinâmica do rotor no apoio e, por outro lado, deve evitar a possibilidade de vibrações de torção da suspensão de apoio, que se manifestam como excentricidade axial.
As figuras 2.1 - 2.5 (ver secção 2.1), bem como as figuras 3.7 e 3.8 da presente secção, apresentam exemplos de implementação estrutural de máquinas de equilibrar utilizando suspensões de molas em tiras.

Figura 3.7. Máquina para equilibrar rotores de motores eléctricos, montada, desenvolvida por A. Mokhov.

Figura 3.8. Máquina para equilibrar rotores de bombas de turbina, desenvolvida por G. Glazov (Bishkek)
3.1.4.3. Suportes de máquinas com rolamentos macios fabricados com molas cilíndricas
A Figura 3.9 apresenta um exemplo de uma máquina de equilibragem de rolamentos macios, na qual são utilizadas molas de compressão cilíndricas na conceção dos apoios. A principal desvantagem desta solução de projeto está relacionada com os diferentes graus de deformação das molas nos apoios dianteiro e traseiro, que ocorre se as cargas nos apoios forem desiguais durante a equilibragem de rotores assimétricos. Isto leva naturalmente ao desalinhamento dos suportes e à inclinação do eixo do rotor no plano vertical. Uma das consequências negativas deste defeito pode ser o aparecimento de forças que provocam o deslocamento axial do rotor durante a rotação.

Fig. 3.9. Variante de construção do suporte de rolamento macio para máquinas de equilibrar utilizando molas cilíndricas.
3.1.4.4. Suportes rígidos de rolamentos para máquinas Como mostra a nossa vasta experiência com os clientes, uma parte significativa dos fabricantes de equilibradores autónomos começou recentemente a preferir máquinas de rolamentos rígidos com suportes rígidos. Na secção 2.2, as figuras 2.16 - 2.18 mostram fotografias de várias concepções estruturais de máquinas que utilizam tais suportes. A Fig. 3.10 apresenta um esquema típico de um suporte rígido, desenvolvido por um dos nossos clientes para a construção da sua máquina. Este suporte é constituído por uma placa de aço plana com uma ranhura em forma de P, dividindo convencionalmente o suporte em partes "rígidas" e "flexíveis". Sob a influência de uma força de desequilíbrio, a parte "flexível" do suporte pode deformar-se em relação à sua parte "rígida". A magnitude desta deformação, determinada pela espessura do suporte, pela profundidade das ranhuras e pela largura da ponte que liga as partes "flexível" e "rígida" do suporte, pode ser medida utilizando sensores adequados do sistema de medição da máquina. Devido à falta de um método para calcular a rigidez transversal de tais apoios, tendo em conta a profundidade h da ranhura em forma de P, a largura t da ponte, bem como a espessura do apoio r (ver Fig. 3.10), estes parâmetros de conceção são tipicamente determinados experimentalmente pelos criadores.
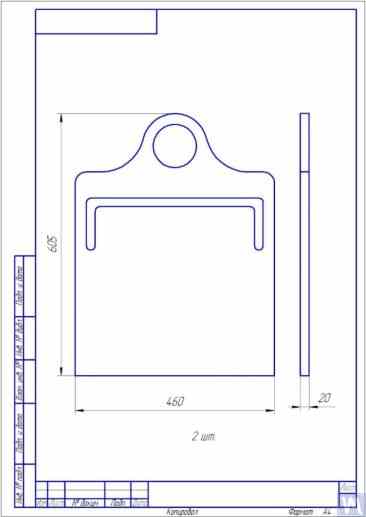
Fig. 3.10. Esboço do suporte de rolamento rígido para máquina de equilibrar
As Figuras 3.11 e 3.12 apresentam fotografias de várias implementações de tais suportes, fabricados para as máquinas dos nossos clientes. Resumindo os dados obtidos de vários dos nossos clientes, fabricantes de máquinas, podem ser formulados requisitos para a espessura dos suportes, definidos para máquinas de várias dimensões e capacidades de carga. Por exemplo, para máquinas destinadas a equilibrar rotores com peso entre 0,1 e 50-100 kg, a espessura do suporte pode ser de 20 mm.

Fig. 3.11. Suportes de rolamentos rígidos para máquina de equilibrar, fabricados por A. Sinitsyn

Fig. 3.12. Suporte de rolamento rígido para máquina de balancear, fabricado por D. Krasilnikov
Para máquinas com uma massa de rotor equilibrado não superior a 300 - 500 kg, a espessura do suporte pode ser aumentada para 30 - 40 mm, e para máquinas concebidas para equilibrar rotores com massas máximas entre 1000 e 3000 kg, a espessura do suporte pode atingir 50 - 60 mm ou mais. Como mostra a análise das características dinâmicas dos apoios acima referidos, as suas frequências naturais de vibração, medidas no plano transversal (o plano de medição das deformações relativas das partes "flexíveis" e "rígidas"), excedem geralmente 100 Hz ou mais. As frequências naturais de vibração dos suportes Hard Bearing no plano frontal, medidas na direção coincidente com o eixo de rotação do rotor equilibrado, são geralmente significativamente mais baixas. E são estas frequências que devem ser consideradas em primeiro lugar na determinação do limite superior da gama de frequências de funcionamento dos rotores equilibrados na máquina. Como já foi referido, a determinação destas frequências pode ser realizada através do método de excitação por impacto descrito na secção 3.1.
3.2. Conjuntos de suporte de máquinas de equilibrar 3.2.1. Principais tipos de conjuntos de suporte No fabrico de máquinas de equilibrar, tanto de rolamentos duros como de rolamentos macios, podem ser recomendados os seguintes tipos bem conhecidos de conjuntos de suporte, utilizados para a instalação e rotação de rotores equilibrados em suportes, incluindo

3.13. Variante de Execução do Conjunto Prismático de Apoio, Utilizado numa Máquina de Equilibrar Turbinas de Automóveis
Conjuntos de suporte semelhantes (ver Figura 3.8 acima) são implementados, por exemplo, por G. Glazov na sua máquina, também destinada a equilibrar turbinas de automóveis. A solução técnica original do conjunto de suporte prismático, feito de fluoroplástico (ver Figura 3.14), é proposta pela LLC "Technobalance".

Fig. 3.14. Conjunto de suporte prismático da LLC "Technobalance"
Este conjunto de suporte particular é formado por duas mangas cilíndricas 1 e 2, instaladas num ângulo entre si e fixadas em eixos de suporte. O rotor equilibrado entra em contacto com as superfícies das mangas ao longo das linhas geradoras dos cilindros, o que minimiza a área de contacto entre o veio do rotor e o suporte, reduzindo consequentemente a força de atrito no suporte. Se necessário, em caso de desgaste ou danos na superfície do suporte na área de contacto com o veio do rotor, existe a possibilidade de compensar o desgaste rodando a manga em torno do seu eixo num determinado ângulo. Note-se que, ao utilizar conjuntos de suporte feitos de materiais não metálicos, é necessário prever a possibilidade estrutural de ligação à terra do rotor equilibrado ao corpo da máquina, o que elimina o risco de ocorrência de fortes cargas de eletricidade estática durante o funcionamento. Isto contribui, por um lado, para reduzir as interferências e perturbações eléctricas que podem afetar o desempenho do sistema de medição da máquina e, por outro, para eliminar o risco de o pessoal ser afetado pela ação da eletricidade estática.
3.2.1.2. Conjuntos de suporte de rolos Estes conjuntos são normalmente instalados em suportes de máquinas concebidas para equilibrar rotores com massas superiores a 50 quilogramas ou mais. A sua utilização reduz significativamente as forças de fricção nos suportes em comparação com os suportes prismáticos, facilitando a rotação do rotor equilibrado. Como exemplo, a Figura 3.15 mostra uma variante de projeto de um conjunto de suporte onde são utilizados rolos para o posicionamento do produto. Nesta conceção, são utilizados rolamentos normalizados como rolos 1 e 2, cujos anéis exteriores rodam em eixos estacionários fixados no corpo do suporte da máquina 3. A figura 3.16 mostra um esboço de uma conceção mais complexa de um conjunto de suporte de rolos implementado no seu projeto por um dos fabricantes autónomos de máquinas de equilibrar. Como se pode ver no desenho, para aumentar a capacidade de carga do rolo (e, consequentemente, do conjunto de suporte como um todo), é instalado um par de rolamentos 1 e 2 no corpo do rolo 3. A aplicação prática desta conceção, apesar de todas as suas vantagens óbvias, parece ser uma tarefa bastante complexa, associada à necessidade de fabrico independente do corpo do rolo 3, ao qual são impostos requisitos muito elevados de precisão geométrica e de características mecânicas do material.

Fig. 3.15. Exemplo de conceção de um conjunto de suporte de rolos
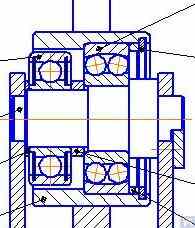
Fig. 3.16. Exemplo de conceção de um conjunto de suporte de rolos com duas chumaceiras de rolamento
A figura 3.17 apresenta uma variante do projeto de um conjunto de suporte de rolos autocompensadores desenvolvido pelos especialistas da LLC "Technobalance". Nesta conceção, a capacidade de auto-alinhamento dos rolos é conseguida através do fornecimento de dois graus de liberdade adicionais, permitindo que os rolos efectuem pequenos movimentos angulares em torno dos eixos X e Y. Tais conjuntos de suporte, assegurando alta precisão na instalação de rotores balanceados, são geralmente recomendados para uso em suportes de máquinas de balancear pesadas.

Fig. 3.17. Exemplo de projeto de conjunto de suporte de rolos autocompensadores
Como já foi referido, os conjuntos de suporte de rolos têm normalmente requisitos bastante elevados em termos de precisão de fabrico e rigidez. Em particular, as tolerâncias definidas para a excentricidade radial dos rolos não devem exceder 3-5 microns.
Na prática, isto nem sempre é conseguido, mesmo por fabricantes bem conhecidos. Por exemplo, durante os testes efectuados pelo autor à excentricidade radial de um conjunto de novos conjuntos de suporte de rolos, adquiridos como peças sobresselentes para a máquina de equilibragem modelo H8V, marca "K. Shenk", a excentricidade radial dos seus rolos atingiu 10-11 microns.
3.2.1.3. Conjuntos de suporte do fuso
Ao balancear rotores com montagem por flange (por exemplo, eixos cardan) em máquinas de balancear, os fusos são utilizados como conjuntos de suporte para posicionamento, montagem e rotação dos produtos balanceados.
Os fusos são um dos componentes mais complexos e críticos das máquinas de equilibrar, sendo em grande parte responsáveis pela obtenção da qualidade de equilibragem exigida.
A teoria e a prática de conceção e fabrico de fusos estão bastante desenvolvidas e reflectem-se numa vasta gama de publicações, entre as quais a monografia "Detalhes e Mecanismos das Máquinas-Ferramentas de Corte de Metais" [1], editada pelo Dr. Eng. D.N. Reshetov, destaca-se como a mais útil e acessível para os programadores.
Entre os principais requisitos que devem ser considerados no projeto e fabrico de fusos de máquinas de equilibrar, devem ser priorizados os seguintes
a) Proporcionar uma elevada rigidez da estrutura do conjunto do veio, suficiente para evitar deformações inaceitáveis que possam ocorrer sob a influência de forças de desequilíbrio do rotor equilibrado;
b) Assegurar a estabilidade da posição do eixo de rotação do fuso, caracterizada por valores admissíveis de excentricidade radial, axial e axial do fuso;
c) Assegurar uma boa resistência ao desgaste dos moentes do fuso, bem como das suas superfícies de assentamento e de apoio utilizadas para a montagem de produtos equilibrados.
A aplicação prática destes requisitos é detalhada na secção VI "Fusos e seus suportes" do trabalho [1].
Em particular, existem metodologias para verificar a rigidez e a precisão rotacional dos fusos, recomendações para a seleção de rolamentos, escolha do material do fuso e métodos para o seu endurecimento, bem como muitas outras informações úteis sobre este tópico.
O trabalho [1] refere que, na conceção de fusos para a maioria dos tipos de máquinas-ferramentas de corte de metais, é utilizado principalmente um esquema de dois rolamentos.
A Fig. 3.18 apresenta um exemplo da variante de projeto de um esquema de duas chumaceiras utilizado em fusos de fresadoras (podem ser encontrados pormenores no trabalho [1]).
Este esquema é bastante adequado para o fabrico de fusos de máquinas de equilibragem, cujos exemplos de variantes de conceção são apresentados nas Figuras 3.19-3.22.
A figura 3.19 mostra uma das variantes do projeto do conjunto do fuso principal de uma máquina de equilibragem, que roda sobre dois rolamentos de impulso radial, cada um dos quais com as suas próprias caixas independentes 1 e 2. Uma flange 4, destinada à montagem de um eixo cardan, e uma polia 5, utilizada para transmitir a rotação do motor elétrico ao fuso através de uma correia trapezoidal, estão montadas no eixo do fuso 3.
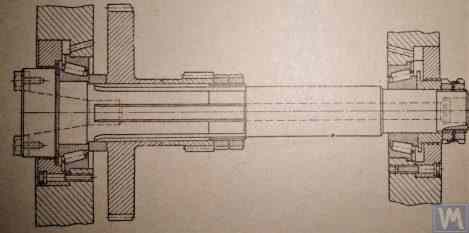
Fig. 3.18. Esboço de um fuso de uma máquina de fresar de dois rolamentos

Figura 3.19. Exemplo de conceção do fuso em dois apoios de rolamentos independentes
Figuras 3.20 e 3.21 mostram duas concepções estreitamente relacionadas de conjuntos de fuso principal. Em ambos os casos, os rolamentos do fuso são instalados numa caixa comum 1, que tem um furo axial passante necessário para a instalação do eixo do fuso. À entrada e à saída deste furo, a caixa tem furos especiais (não indicados nas figuras), concebidos para acomodar rolamentos axiais radiais (de rolos ou de esferas) e tampas de flange especiais 5, utilizadas para fixar os anéis exteriores dos rolamentos.
Tal como na versão anterior (ver Fig. 3.19), é instalada uma placa frontal 2 no veio do fuso, destinada à montagem da flange do veio de transmissão, e uma polia 3, utilizada para transmitir a rotação ao fuso a partir do motor elétrico através de uma correia de transmissão. No eixo do fuso é também fixado um manípulo 4, que serve para determinar a posição angular do fuso, utilizada na instalação de pesos de teste e correção no rotor durante a equilibragem.

Figura 3.20. Exemplo 1 de uma conceção de fuso principal em dois apoios de rolamento instalados numa caixa comum

Figura 3.21. Exemplo 2 de uma conceção de fuso principal em dois apoios de rolamento instalados numa caixa comum
 \
\
Figura 3.22. Exemplo de conceção de um fuso acionado (traseiro)
Figura 3.22 mostra uma variante de design do conjunto do fuso acionado (traseiro) de uma máquina, que difere do fuso principal apenas pela ausência da polia de acionamento e do membro, uma vez que não são necessários.
Como visto em Figuras 3.20 - 3.22Os conjuntos de fuso acima referidos são fixados aos suportes de chumaceiras macias das máquinas de equilibrar utilizando grampos especiais (cintas) 6. Se necessário, podem também ser utilizados outros métodos de fixação, assegurando uma rigidez e precisão adequadas no posicionamento do conjunto do fuso no suporte.
Figura 3.23 ilustra uma conceção de montagem de flange semelhante à do fuso, que pode ser utilizada para a sua instalação num suporte de rolamento rígido de uma máquina de equilibrar.

Figura 3.22. Exemplo de execução do projeto de um fuso acionado (traseiro)
Figura 3.22 apresenta uma variante de design do conjunto do fuso acionado (traseiro) de uma máquina, que apenas difere do fuso principal por não ter a polia de acionamento e o membro por não serem necessários.
Como visto em Figuras 3.20 - 3.22Os conjuntos de fuso discutidos são fixados aos suportes de chumaceiras macias das máquinas de equilibrar utilizando grampos especiais (cintas) 6. Quando necessário, podem também ser utilizados outros métodos de fixação que proporcionem a rigidez e a precisão adequadas ao posicionamento do conjunto do fuso no suporte.
Figura 3.23 mostra a conceção de uma montagem de flange para um fuso deste tipo, que pode ser utilizada para a sua instalação num suporte de rolamento rígido de uma máquina de equilibragem.
3.1.4.3. Suportes de máquinas com rolamentos macios fabricados com molas cilíndricas
Um exemplo de uma máquina de equilibragem de rolamentos macios, na qual são utilizadas molas de compressão cilíndricas na conceção dos suportes, é apresentado em Figura 3.9. A principal desvantagem desta solução de conceção está relacionada com as diferentes quantidades de deformação da mola nos suportes dianteiro e traseiro, que ocorre em casos de cargas desiguais nos suportes quando se equilibram rotores assimétricos. Isto leva naturalmente ao desalinhamento dos suportes e à inclinação do eixo do rotor no plano vertical. Uma das consequências negativas deste defeito pode ser a ocorrência de forças que fazem com que o rotor se desloque axialmente durante a rotação.
Figura 3.24. Esquema de cálculo utilizado para determinar a rigidez do fuso e a sua excentricidade radial (3.4)
Y=P∗ + 1jB * (c+g)2+jB/jAc² ], figo (3.4)
onde:
Através da transformação da fórmula 3.4, o valor calculado desejado da rigidez do conjunto do fuso jшп pode ser determinado: jшп = P / Y, kg/cm (3.5)
Considerando as recomendações do trabalho [1] para máquinas de equilibrar de tamanho médio, este valor não deve ser inferior a 50 kg/µm.
Já foi referido anteriormente que a principal influência na rigidez radial do conjunto do fuso é exercida pelo diâmetro do seu eixo, com um aumento do qual os momentos de inércia J1 e J2 aumentam quadraticamente e, consequentemente (ver equação 3.4), a quantidade de deslocamento elástico Y do fuso sob carga diminui.
Como se pode ver na equação 3.4, a rigidez do fuso também é afetada pela distância entre apoios c e o comprimento da sua consola gcuja otimização durante a conceção também aumenta significativamente a qualidade do conjunto do fuso.
Deve notar-se que, ao conceber os fusos, também se deve prestar atenção à sua rigidez axial, que depende principalmente da rigidez axial dos rolamentos do fuso e da rigidez da sua caixa.
A frequência inerente das vibrações do fuso, que não deve ser inferior a 500 - 600 Hz, está diretamente relacionada com a rigidez dos conjuntos do fuso. Este parâmetro pode ser determinado experimentalmente utilizando dispositivos da série "Balanset", empregando o método de excitação por impacto discutido anteriormente na secção 3.1.3.1.
Dado que a determinação dos parâmetros dos conjuntos de fusos representa um desafio significativo para muitos programadores, estes são aconselhados a utilizar o método de cálculo gráfico apresentado nos trabalhos [1] e [2], baseado na utilização de nomogramas, que simplifica significativamente a solução desta tarefa e reduz o tempo necessário para a sua conclusão.
3.2.1.3.4. Garantir os requisitos de exatidão para a rotação do mandril
A precisão de rotação, juntamente com a rigidez discutida acima, é uma caraterística crítica do conjunto do fuso de uma máquina de balancear, que pode impactar significativamente a qualidade do balanceamento. A prática mostra que a precisão de rotação de um fuso depende diretamente de vários fatores, incluindo:
Em primeiro lugar, os fabricantes devem concentrar-se na precisão dos rolamentos que utilizam, uma vez que o seu impacto na precisão de rotação (excentricidade radial) de um fuso de dois rolamentos (ver esquema de cálculo em Figura 3.24) pode ser estimado aproximadamente através de um cálculo de verificação efectuado com a fórmula 3.5.
Δ = ∆B + gc * (∆B + ∆A) (3.5)
onde:
3.2.1.3.5. Garantia dos requisitos de equilíbrio do fuso
Os conjuntos de fusos das máquinas de balancear devem ser bem balanceados, pois qualquer desequilíbrio real será transferido para o rotor que está sendo balanceado como um erro adicional. Ao definir as tolerâncias tecnológicas para o desequilíbrio residual do fuso, é geralmente aconselhável que a classe de precisão do seu equilíbrio seja, pelo menos, 1 a 2 classes superior à do produto que está a ser equilibrado na máquina.
Tendo em conta as características de conceção dos fusos acima referidas, a sua equilibragem deve ser efectuada em dois planos.
3.2.1.3.6. Assegurar a capacidade de carga e os requisitos de durabilidade das chumaceiras do veio
Ao projetar fusos e selecionar tamanhos de rolamentos, é aconselhável avaliar preliminarmente a durabilidade e a capacidade de carga dos rolamentos. A metodologia para efetuar estes cálculos pode ser descrita em pormenor na norma ISO 18855-94 (ISO 281-89) "Rolamentos - Classificações de carga dinâmica e vida útil nominal" [3], bem como em numerosos manuais de rolamentos (incluindo digitais).
3.2.1.3.7. Assegurar os requisitos para um aquecimento aceitável das chumaceiras do veio
De acordo com as recomendações do trabalho [1], o aquecimento máximo permitido dos anéis externos dos rolamentos do eixo não deve exceder 70°C. No entanto, para assegurar um equilíbrio de alta qualidade, o aquecimento recomendado dos anéis exteriores não deve exceder 40 - 45°C.
3.2.1.3.8. Escolher o tipo de transmissão por correia e a conceção da polia de transmissão para o veio
Ao projetar o fuso de acionamento de uma máquina de equilibrar, recomenda-se que a sua rotação seja assegurada por uma correia plana. Um exemplo da utilização correcta deste tipo de acionamento para o funcionamento do fuso é apresentado em Figuras 3.20 e 3.23. A utilização de correias em V ou de correias dentadas é indesejável, uma vez que podem aplicar cargas dinâmicas adicionais ao fuso devido a imprecisões geométricas nas correias e polias, o que, por sua vez, pode levar a erros de medição adicionais durante a equilibragem. Os requisitos recomendados para as polias para correias de transmissão planas são descritos na norma ISO 17383-73 "Polias para correias de transmissão planas" [4].
A polia de acionamento deve ser posicionada na extremidade traseira do veio, o mais próximo possível do conjunto de rolamentos (com a mínima saliência possível). A decisão de design para a colocação saliente da polia, feita no fabrico do veio mostrado em Figura 3.19pode ser considerado infrutífero, uma vez que aumenta significativamente o momento da carga dinâmica de acionamento que actua sobre os apoios do fuso.
Outra desvantagem significativa desta conceção é a utilização de um acionamento por correia trapezoidal, cujas imprecisões de fabrico e montagem podem também ser uma fonte de carga adicional indesejável no fuso.
3.3. Cama (armação)
A base é a principal estrutura de suporte da máquina de equilibrar, na qual se baseiam os seus principais elementos, incluindo os postes de suporte e o motor de acionamento. Ao selecionar ou fabricar o leito de uma máquina de equilibrar, é necessário assegurar que este cumpre vários requisitos, incluindo a rigidez necessária, a precisão geométrica, a resistência às vibrações e a resistência ao desgaste das suas guias.
A prática mostra que, ao fabricar máquinas para as suas próprias necessidades, as seguintes opções de cama são as mais utilizadas:
Figura 3.25 mostra a base de uma máquina para trabalhar madeira que foi utilizada com sucesso no fabrico de uma máquina destinada a equilibrar veios de cardans.

Figura 3.25. Exemplo de utilização de uma cama de máquina de carpintaria usada para o fabrico de uma máquina para equilibrar veios cardan.
Figuras 3.26 e 3.27 mostram exemplos de utilização de bases de torno, com base nas quais foram fabricadas uma máquina especializada Hard Bearing para equilibrar sem-fins e uma máquina de equilibrar universal Soft Bearing para rotores cilíndricos. Para os fabricantes de bricolage, estas soluções permitem criar um sistema de suporte rígido para a máquina de equilibrar com um tempo e custo mínimos, no qual podem ser montados suportes de vários tipos (tanto Hard Bearing como Soft Bearing). A principal tarefa do fabricante, neste caso, é garantir (e restaurar, se necessário) a precisão geométrica das guias da máquina nas quais os suportes de apoio serão baseados. Em condições de produção DIY, a raspagem fina é normalmente utilizada para restaurar a precisão geométrica necessária das guias.

Figura 3.26. Exemplo de utilização de uma base de torno usada para o fabrico de uma máquina de rolamentos rígidos para equilibrar brocas.

Figura 3.27. Exemplo de utilização de uma base de torno usada para o fabrico de uma máquina de rolamentos macios para equilibrar veios.
Figura 3.28 apresenta uma versão de uma cama montada a partir de dois canais. No fabrico desta cama, são utilizadas ligações aparafusadas amovíveis, permitindo minimizar ou eliminar completamente a deformação da cama durante a montagem sem operações tecnológicas adicionais. Para garantir uma precisão geométrica adequada das guias da cama especificada, pode ser necessário um processamento mecânico (retificação, fresagem fina) das flanges superiores dos canais utilizados.

Figura 3.28. Exemplo de fabrico de uma cama montada a partir de canais
Figuras 3.29 e 3.30 apresentam variações de leitos soldados, também feitos de dois canais. A tecnologia de fabrico destes leitos pode exigir uma série de operações adicionais, como o tratamento térmico para aliviar as tensões internas que ocorrem durante a soldadura. Tal como acontece com os leitos montados, para garantir a precisão geométrica adequada das guias dos leitos soldados, deve ser planeado o processamento mecânico (trituração, fresagem fina) das flanges superiores dos canais utilizados.

Figura 3.29. Exemplo de fabrico de uma cama soldada a partir de canais
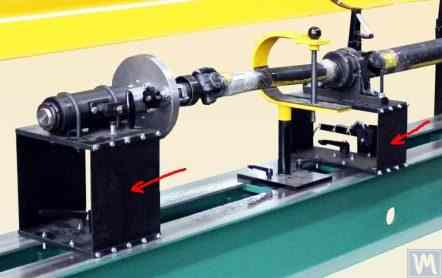
Figura 3.30. Exemplo de fabrico de uma cama soldada a partir de canais
Recentemente, as camas feitas de betão polímero com revestimentos de amortecimento de vibrações tornaram-se amplamente utilizadas. Esta tecnologia de fabrico de camas está bem descrita online e pode ser facilmente implementada por fabricantes de bricolage. Devido à relativa simplicidade e ao baixo custo de produção, estas camas têm várias vantagens importantes em relação às suas congéneres metálicas:
Normalmente, quando se fabricam estes leitos, a sua parte superior é reforçada com inserções de aço utilizadas como guias sobre as quais assentam os suportes da máquina de equilibrar. Como exemplo, a Figura 3.31 mostra uma fotografia de uma máquina de equilibrar veios cardan, fabricada pela LLC "Technobalance", cujo leito é feito de betão polímero.

Figura 3.31. Exemplo de uma cama de máquina de equilibrar feita de betão polímero
3.4. Accionamentos para máquinas de equilibrar
A análise das soluções de conceção utilizadas pelos nossos clientes no fabrico de máquinas de equilibragem mostra que, na conceção dos accionamentos, estes se concentram principalmente na utilização de motores de corrente alternada equipados com variadores de frequência. Esta abordagem permite uma vasta gama de velocidades de rotação ajustáveis para os rotores equilibrados com um custo mínimo. A potência dos motores principais utilizados para fazer girar os rotores equilibrados é geralmente selecionada com base na massa destes rotores e pode ser aproximadamente
Estes motores devem ser montados de forma rígida na base da máquina ou na sua fundação. Antes da instalação na máquina (ou no local de instalação), o motor de acionamento principal, juntamente com a polia montada no seu eixo de saída, deve ser cuidadosamente equilibrado. Para reduzir a interferência electromagnética causada pelo variador de frequência, recomenda-se a instalação de filtros de rede na sua entrada e saída. Estes podem ser produtos standard fornecidos pelos fabricantes dos variadores ou filtros caseiros feitos com anéis de ferrite.