स्थैतिक संतुलन (एकल-तल संतुलन) को समझना







स्थैतिक संतुलन रोटर का सबसे सरल रूप है संतुलन. It corrects स्थैतिक असंतुलन — एक स्थिति जिसमें एक रोटर‘s घूर्णन अक्ष से अपरिवर्तित द्रव्यमान केंद्र द्वारा एक एकल “भारी स्थान” बनाया जाता है। क्योंकि वह भारी स्थान केवल गुरुत्वाकर्षण द्वारा ही प्रकट होता है, सुधार को सिद्धांत में घूर्णक विश्राम में किया जा सकता है: शुद्ध स्थैतिक के साथ एक घूर्णक को स्थान दें असंतुलित होना घर्षण रहित सतह जैसे कि चाकू की कगार पर, और यह तब तक घूमेगा जब तक भारी स्थान नीचे तक नहीं बैठ जाता। सुधार एक में किया जाता है एकल विमान — भारी स्थान के विपरीत 180° पर रखा गया एक सुधार भार द्रव्यमान के केंद्र को घूर्णन के केंद्र पर वापस लाने के लिए। यह एकल-तल सरलता विधि की महान शक्ति है और जैसा कि हम देखेंगे, यह इसकी परिभाषित सीमा भी है।
1. स्थैतिक असंतुलन बनाम गतिशील असंतुलन
स्थैतिक असंतुलन को “बल असंतुलन” भी कहा जाता है, क्योंकि यह एक उत्पन्न करता है अपकेंद्री बल घूर्णन के केंद्र से रेडियल रूप से बाहर की ओर कार्य करना। महत्वपूर्ण रूप से, यह कोई “युग्म” या हिलाने वाली गति नहीं बनाता। यह इससे अलग है गतिशील असंतुलन, जो बल को मिलाता है और युगल असंतुलन और पूरी तरह से समाधान करने के लिए कम से कम दो तलों में सुधार की आवश्यकता होती है। एक घूर्णक बिल्कुल स्थैतिक रूप से संतुलित हो सकता है और फिर भी एक महत्वपूर्ण युग्म असंतुलन ले जा सकता है जो इसे घूमने पर गंभीरता से कंपन करता है — यह कारण है कि स्थैतिक संतुलन, अपने आप में, केवल घूर्णक के एक विशेष वर्ग के लिए उपयुक्त है।
2. स्थैतिक संतुलन कब पर्याप्त है?
स्थैतिक संतुलन केवल घूर्णकों के एक विशिष्ट वर्ग के लिए उपयुक्त है। यह आम तौर पर उन घटकों के लिए आरक्षित है जो बहुत संकीर्ण या डिस्क-आकार के हैं, जहां अक्षीय लंबाई व्यास की तुलना में छोटी है। ऐसे घूर्णकों के लिए, एक महत्वपूर्ण युग्म असंतुलन पहली जगह में मौजूद होने की संभावना नहीं है, इसलिए एक एकल-तल सुधार वास्तव में समस्या को हल करता है।
आम उदाहरण जहां एकल-तल स्थैतिक संतुलन अक्सर पर्याप्त है:
- पीसने वाले पहिये
- ऑटोमोटिव पहिए और टायर
- एकल, संकीर्ण पंखा या ब्लोअर पहिये
- फ्लाईव्हील्स
- पुली और शीव
किसी भी महत्वपूर्ण लंबाई के घूर्णक के लिए — एक मोटर आर्मेचर, एक बहु-चरण पंप, या एक लंबी शाफ्ट — स्थैतिक संतुलन अकेले अपर्याप्त है और गतिशील संतुलन में दो तल आवश्यक है। एकल-तल दृष्टिकोण को आगे के तहत वर्णित किया जाता है एकल-विमान संतुलन.
3. स्थैतिक संतुलन के तरीके
1. चाकू-धार संतुलन
यह शास्त्रीय, गैर-घूर्णन विधि है। रोटर को समानांतर, समतल, कम-घर्षण वाली चाकू की धारों की एक जोड़ी पर रखा जाता है। यह तब तक घूमता है जब तक इसका सबसे भारी बिंदु नीचे नहीं हो जाता; फिर शीर्ष पर (180° विपरीत) एक अस्थायी भार जोड़ा जाता है जब तक कि रोटर बिना घुड़के किसी भी स्थिति में स्थिर नहीं रह सकता। फिर उस भार को स्थायी बनाया जाता है। इसे न तो विद्युत की आवश्यकता होती है और न ही इलेक्ट्रॉनिक्स की — केवल धैर्य और सच्चे, समतल धार की जोड़ी की आवश्यकता होती है — और यह एक संकीर्ण डिस्क के लिए क्षेत्र जांच के रूप में पूरी तरह से मान्य बनी रहती है।
2. वर्टिकल बैलेंसिंग मशीन
आधुनिक स्थैतिक संतुलन अक्सर एक ऊर्ध्वाधर पर किया जाता है संतुलन मशीन। रोटर — एक फ्लाईव्हील या टायर, कहें — एक क्षैतिज प्लेट पर बैठता है जो बल संवेदकों द्वारा समर्थित है। मशीन इसे कम गति पर घूमाती है, और संवेदक असंतुलन बल की परिमाण और दिशा को मापते हैं, एक स्क्रीन पर आवश्यक सुधार प्रदर्शित करते हैं। पहियों और टायरों के लिए विशेष रूप से, एक wheel-balancing-weights calculator उस रीडिंग को क्लिप-ऑन या चिपकाने वाले भार आकारों में बदल देता है।
3. एकल-प्लेन क्षेत्र संतुलन (बैलेंसेंट-1ए)
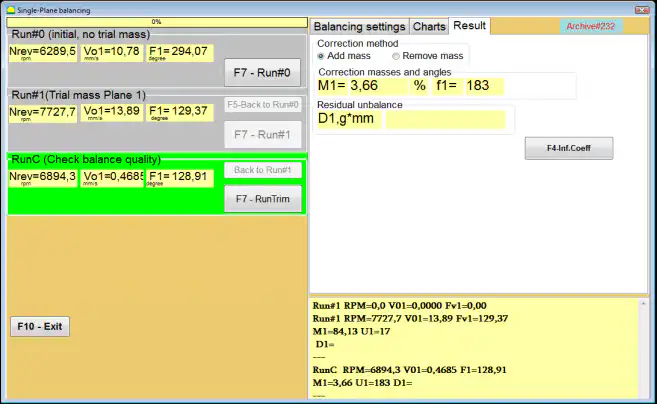
स्थैतिक (एकल-तल) संतुलन एक पूरी तरह से असेंबल की गई मशीन पर पोर्टेबल संतुलन प्रणाली का उपयोग करके भी किया जा सकता है — इसका सार है क्षेत्र संतुलन. With the Balanset-1A, “एक तल में संतुलन (‘स्थैतिक’)” मोड रोटर गति (RPM) और 1× vibration — its आरएमएस value and चरण। “रन #0” और “रन #1” माप से, सॉफ्टवेयर स्वचालित रूप से द्रव्यमान and स्थापना कोण सुधारात्मक भार के लिए आवश्यक, रोटर के असंतुलन को कम करने के लिए, का उपयोग करके influence-coefficient method.
संतुलन के परिणाम एक संग्रह में सहेजे जाते हैं, और पूरा होने पर एक संतुलन रिपोर्ट निर्मित रिपोर्ट संपादक में उत्पन्न, संपादित और मुद्रित किया जा सकता है।
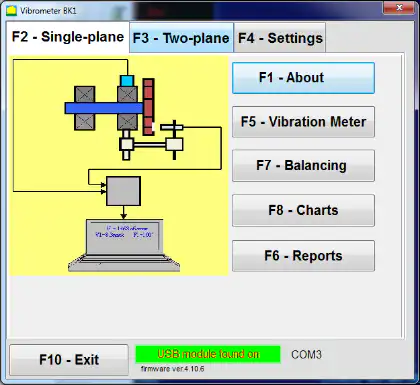
Balanset-1A प्रोग्राम में एकल-प्लेन संतुलन कैसे किया जाता है
- सेंसर स्थापित करें और सिस्टम को कनेक्ट करें।. चयनित माप बिंदु पर कंपन संवेदक स्थापित करें और इसे डिवाइस से कनेक्ट करें। चरण संवेदक स्थापित करें (टैकोमीटर), apply परावर्तक टेप रोटर पर, और डिवाइस को एक Windows लैपटॉप से कनेक्ट करें।
- एकल-प्लेन संतुलन मोड शुरू करें।. मुख्य ऑपरेटिंग विंडो में “एकल-तल” मोड चुनें और संतुलन शुरू करें। प्रोग्राम एकल-तल संतुलन संग्रह विंडो खोलता है।
- एक अभिलेखागार रिकॉर्ड बनाएँ।. रोटर का नाम, स्थापना का स्थान, सहनशीलता (कंपन और अवशिष्ट असंतुलन), और तारीख दर्ज करें। सॉफ्टवेयर एक संग्रह फ़ोल्डर बनाता है जहां चार्ट और रिपोर्ट फ़ाइलें सहेजी जाएंगी।
- “संतुलन सेटिंग्स” में संतुलन पैरामीटर सेट करें।
- प्रभाव गुणांक: “नया रोटर” चुनें (अंशांकन के लिए दो रन) या “सहेजे गए गुणांक” (एक रन, समान प्रकार की मशीन के लिए सहेजे गए प्रभाव गुणांक के साथ)।
- परीक्षण भार द्रव्यमान: “ग्राम” या “प्रतिशत” चुनें। यदि आप बाद में “सहेजे गए गुणांक” मोड का उपयोग करने की योजना बनाते हैं, तो परीक्षण वजन द्रव्यमान को ग्राम में दर्ज करें (इसे तराजू पर तौलें)।
- वजन संलग्न करने की विधि: “परिधि” (परिधि पर कोई भी कोण) या “निर्धारित स्थिति” (निर्धारित छेद/ब्लेड/स्थितियाँ; स्थितियों की संख्या दर्ज करें) चुनें।
- मास माउंट त्रिज्या: ट्रायल और करेक्शन वेट्स को माउंट करने के लिए उपयोग किया गया त्रिज्या दर्ज करें।.
- Plane1 में परीक्षण वजन छोड़ें: इसे केवल तभी सक्षम करें जब आप प्रक्रिया के दौरान परीक्षण भार को हटा नहीं सकते।.
- #0 चलाएँ (प्रारंभिक रन, बिना परीक्षण भार के)।. मशीन को स्थिर गति पर लाएं और प्रारंभिक कंपन को मापने के लिए “रन #0” शुरू करें। सॉफ्टवेयर RPM, RMS मान और 1× कंपन घटक के चरण को रिकॉर्ड करता है। “चार्ट” टैब तरंगरूप और स्पेक्ट्रम दिखाता है।
- ट्रायल वज़न स्थापित करें।. मशीन को बंद करें और एक ज्ञात त्रिज्या पर परीक्षण भार स्थापित करें। परीक्षण भार को कंपन आयाम या चरण को महत्वपूर्ण रूप से बदलना चाहिए। एक सामान्य मानदंड “30/30 नियम” है: परीक्षण भार को आयाम को लगभग 30% (कम या अधिक) द्वारा या चरण को लगभग 30° या अधिक द्वारा बदलना चाहिए। यदि आप बाद में “सहेजे गए गुणांक” मोड का उपयोग करने की योजना बनाते हैं, तो परीक्षण भार को परावर्तक चिह्न के समान कोण पर स्थापित करें।
- #1 चलाएँ (परीक्षण भार स्थापित)।. मशीन को पुनः शुरू करें, स्थिर गति के लिए प्रतीक्षा करें, और “रन #1” निष्पादित करें। सॉफ्टवेयर सुधारात्मक भार मापदंडों की गणना करता है।
- सुधार वजन स्थापित करें।. मशीन को बंद करें, परीक्षण भार को हटाएं, और सुधार भारस्थापना कोण को रोटर घुमावट की दिशा में परीक्षण-भार स्थिति से गिना जाता है। सुधार भार को परीक्षण भार के समान त्रिज्या पर स्थापित करें।
- रनट्रिम (बैलेंस की गुणवत्ता जांचें)।. परिणाम सत्यापित करने के लिए “RunTrim” निष्पादित करें। यदि अवशिष्ट कंपन और/या अवशिष्ट असंतुलन सहनशीलता पूरी करें, संतुलन पूरा किया जा सकता है। यदि नहीं, तो सॉफ्टवेयर एक अतिरिक्त सुधारात्मक भार की गणना करता है और संतुलन क्रमिक सन्निकटन द्वारा जारी रहता है।
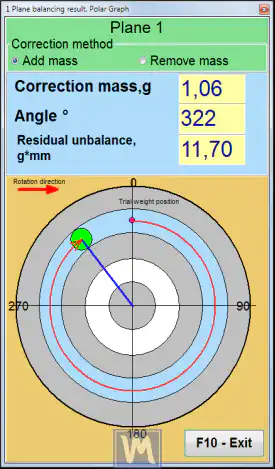
परिणाम दृश्यीकरण: ध्रुवीय ग्राफ और निर्धारित स्थितियाँ
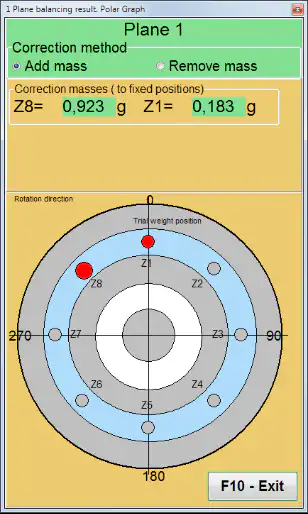
Balanset-1A सुधार भार के द्रव्यमान और कोण को एक ध्रुवीय निर्देशांक दृश्यमें प्रदर्शित कर सकता है। यदि “निर्धारित स्थिति” का चयन किया जाता है, तो प्रोग्राम स्वचालित रूप से सुधारात्मक भार को दो भागों में विभाजित कर सकता है और स्थिति संख्याएं दिखा सकता है जहां प्रत्येक भाग को स्थापित किया जाना चाहिए — एक सुविधा जो ब्लेड-सुधार कैलकुलेटर पंखे और प्ररोही के लिए निर्धारित बढ़ते बिंदुओं के साथ।
4. सहनशीलता के विरुद्ध परिणाम का सत्यापन
स्थिर संतुलन केवल तब “पूर्ण” होता है जब अवशिष्ट कंपन और अवशिष्ट असंतुलन एक सहमत सहनशीलता के अंतर्गत आते हैं, यह वह जगह है जहाँ RunTrim चरण अपनी महत्ता साबित करता है। अनुमत अवशिष्ट असंतुलन आमतौर पर संतुलन-गुणवत्ता जी-ग्रेड आधुनिक के तहत आईएसओ 21940-11 मानक से लिया जाता है (जिसने पुराने ISO 1940-1 को अवशोषित किया)। G-ग्रेड और सेवा गति को एक अनुमत ग्राम-मिलीमीटर आकृति में परिवर्तित करना — और एक उचित पहला परीक्षण भार चुनना — एक के साथ तेजी से होता है अवशिष्ट-असंतुलन कैलकुलेटर (ISO 21940-11) और एक परीक्षण-वजन कैलकुलेटर. प्रारंभिक और अंतिम अवशिष्ट असंतुलन दोनों को रिकॉर्ड करने से यह सच्चा माप मिलता है कि कार्य कितना प्रभावी था और संतुलन रिपोर्ट का मूल आधार बनता है।
5. सीमाएँ
स्थिर संतुलन की प्राथमिक सीमा युगल असंतुलन को पहचानने या सुधारने की इसकी अक्षमता है। एक रोटर को स्थिर संतुलन लागू करना जिसके पास वास्तव में गतिशील असंतुलन है, कभी-कभी स्थिति को और बदतर बना सकता है — बल घटक को सुधारते समय युगल घटक को अनदेखा करते हुए, या यहाँ तक कि उसे बढ़ाते हुए। इसी कारण से, अधिकांश औद्योगिक मशीनरी के लिए, दो-तल गतिशील संतुलन मानक और आवश्यक अभ्यास है, और स्थिर संतुलन सबसे अच्छा संकीर्ण, डिस्क-आकार के रोटर के लिए आरक्षित है जहाँ इसकी एकल-तल मान्यता वास्तव में धारण करती है।