სტატიკური ბალანსირების (ერთსიბრტყიანი ბალანსირების) გაგება







სტატიკური დაბალანსება როტორის უმარტივესი ფორმაა დაბალანსება. ის ასწორებს სტატიკური დისბალანსი — მდგომარეობა, რომელშიც როტორი‘მასის ცენტრი გადახრილია მისი ბრუნვის ღერძისგან, რაც ქმნის ერთ “მძიმე წერტილს”. რადგან ეს მძიმე წერტილი მხოლოდ გრავიტაციის ზემოქმედებით ვლინდება, კორექტირება, პრინციპში, შესაძლებელია მდგომი როტორის შემთხვევაშიც: განათავსეთ როტორი წმინდა სტატიკური დისბალანსი უხახუნო ზედაპირზე, მაგალითად დანისპირა საყრდენებზე, და ის დაგორდება, სანამ მძიმე წერტილი ქვედა მხარეს არ აღმოჩნდება. კორექცია ხორციელდება ერთ სიბრტყეში — ერთი საკორექციო წონა, რომელიც მძიმე წერტილის საპირისპიროდ, 180°-ით განთავსდება, რათა მასის ცენტრი მბრუნავი ცენტრისკენ დააბრუნოს. ეს ერთპლანიანობა მეთოდის უდიდესი უპირატესობაა და, როგორც ვნახავთ, მისი განმსაზღვრელი შეზღუდვაც.
1. სტატიკური არათანაბრობა დინამიკური არათანაბრობის წინააღმდეგ
სტატიკურ დისბალანსს ასევე უწოდებენ “ძალურ დისბალანსს,” რადგან ის წარმოქმნის ცენტრიდანული ძალა მოქმედებს რადიალურად, გარეთ მიმართულად ბრუნვის ცენტრიდან. რაც მთავარია, ის არ ქმნის “მომენტს” ან რწევის მოძრაობას. ეს მას განასხვავებს დინამიური დისბალანსი, რომელიც აერთიანებს ძალას და წყვილის დისბალანსი და სრულად გასასწორებლად სულ მცირე ორ სიბრტყეში კორექტირებას საჭიროებს. როტორი შეიძლება იყოს სრულყოფილად სტატიკურად დაბალანსებული და მაინც ჰქონდეს მნიშვნელოვანი მომენტის დისბალანსი, რომელიც მის ბრუნვასთან ერთად ძლიერ ვიბრაციას იწვევს — სწორედ ამიტომ, სტატიკური ბალანსირება, თავისთავად, მხოლოდ როტორების კონკრეტული კლასისთვისაა მისაღები.
2. როდის არის სტატიკური დაბალანსება საკმარისი?
სტატიკური დაბალანსება შესაფერისია მხოლოდ როტორების კონკრეტული კლასისთვის. ის, როგორც წესი, განკუთვნილია ძალიან ვიწრო ან დისკისებრი კომპონენტებისთვის, სადაც ღერძული სიგრძე მცირეა დიამეტართან შედარებით. ასეთ როტორებში, თავისთავად, ნაკლებად სავარაუდოა, რომ მნიშვნელოვანი მომენტის არაბალანსი არსებობდეს, ამიტომ ერთპლანიანი კორექცია ნამდვილად აგვარებს პრობლემას.
საერთო მაგალითები, როდესაც ერთი სიბრტყის სტატიკური დაბალანსება ხშირად საკმარისია, მოიცავს:
- სახეხი ბორბლები
- საავტომობილო ბორბლები და საბურავები
- ერთი, ვიწრო ვენტილატორის ან საბერველის ბორბლები
- მარაოები
- ბორბლები და შეკვრები
ნებისმიერი მნიშვნელოვანი სიგრძის მბრუნავი ნაწილისთვის — იქნება ეს ძრავის არმატურა, მრავალსაფეხურიანი ტუმბო თუ გრძელი ღერძი — მხოლოდ სტატიკური დაბალანსება არასაკმარისია და დინამიური ბალანსირება ში ორი სიბრტყე აუცილებელია. თავად ერთსიბრტყიანი მიდგომა უფრო დაწვრილებით აღწერილია ქვემოთ ერთსიბრტყიანი ბალანსირება.
3. სტატიკური დაბალანსების მეთოდები
1. დანის პირიანი ბალანსირება
ეს არის კლასიკური, არამბრუნავი მეთოდი. როტორი მოთავსებულია ორ პარალელურ, სწორ, დაბალხახუნიან დანისპირა საყრდენზე. ის გორდება, სანამ მისი ყველაზე მძიმე წერტილი ქვემოთ არ აღმოჩნდება; შემდეგ ზემოთ (180°-ით საპირისპირო მხარეს) ემატება დროებითი წონა, სანამ როტორი ნებისმიერ პოზიციაში გორვის გარეშე არ გაჩერდება. შემდეგ ეს წონა მუდმივად ფიქსირდება. მას არც კვება სჭირდება და არც ელექტრონიკა — მხოლოდ მოთმინება და ზუსტად გასწორებული დანისპირა საყრდენების წყვილი — და იგი კვლავაც სრულიად გამართული საველე შემოწმების მეთოდია ვიწრო დისკისთვის.
2. ვერტიკალური ბალანსირების მანქანა
თანამედროვე სტატიკური დაბალანსება ხშირად ვერტიკალურ ბალანსირების მანქანა. როტორი — მაგალითად მფრინავი ბორბალი ან საბურავი — მოთავსებულია ჰორიზონტალურ ფირფიტაზე, რომელსაც ძალის სენსორები უჭერს მხარს. მანქანა მას დაბალ სიჩქარეზე ატრიალებს, ხოლო სენსორები ზომავენ დისბალანსის ძალის სიდიდესა და მიმართულებას და ეკრანზე აჩვენებენ საჭირო კორექციას. კონკრეტულად ბორბლებისა და საბურავებისთვის, ბორბლის საბალანსე წონების კალკულატორი კითხვას გარდაქმნის ჩასაკრავ ან წებვად წონების ზომებად.
3. ერთსიბრტყიანი საველე დაბალანსება (Balanset-1A)
სტატიკური (ერთსიბრტყიანი) დაბალანსება ასევე შეიძლება ჩატარდეს სრულად აწყობილ დანადგარზე პორტატული დაბალანსების სისტემის გამოყენებით — ეს არის არსი ველის ბალანსირება. ბალანსეტი-1ა, “ერთ სიბრტყეში ბალანსირების (‘სტატიკური’)” რეჟიმი ზომავს როტორის სიჩქარეს (ბრ/წთ) და ვექტორს 1× ვიბრაცია — მისი RMS მნიშვნელობა და ფაზა. “Run #0”-სა და “Run #1”-ის გაზომვებიდან, პროგრამული უზრუნველყოფა ავტომატურად ითვლის მასა and მონტაჟის კუთხე როტორის დისბალანსის შესამცირებლად საჭირო საკორექციო წონის, გამოყენებით გავლენის კოეფიციენტი მეთოდი.
ბალანსირების შედეგები ინახება არქივში, ხოლო დასრულების შემდეგ ბალანსის ანგარიში ანგარიშის გენერირება, რედაქტირება და ბეჭდვა შესაძლებელია ჩაშენებულ ანგარიშების რედაქტორში.
როგორ ხდება ერთპლანიანი დაბალანსება პროგრამა Balanset-1A-ში
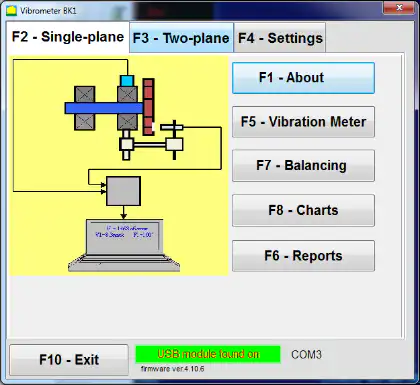
- დაამონტაჟეთ სენსორები და შეაერთეთ სისტემა. დაამონტაჟეთ ვიბრაციის სენსორი შერჩეულ საზომ წერტილში და შეაერთეთ მოწყობილობასთან. დაამონტაჟეთ ფაზის სენსორი (ტაქომეტრი), დააკარით ამრეკლავი ლენტი როტორზე, და შეაერთეთ მოწყობილობა Windows ლეპტოპთან.
- დაიწყეთ ერთსიბრტყიანი დაბალანსების რეჟიმი. მთავარ სამუშაო ფანჯარაში აირჩიეთ “ერთპლანიანი” რეჟიმი და დაიწყეთ დაბალანსება. პროგრამა გახსნის ერთპლანიანი დაბალანსების არქივის ფანჯარას.
- შექმენით საარქივო ჩანაწერი. შეიყვანეთ როტორის დასახელება, მონტაჟის ადგილი, დაშვებები (ვიბრაცია და ნარჩენი დისბალანსი) და თარიღი. პროგრამული უზრუნველყოფა ქმნის არქივის საქაღალდეს, სადაც შენახული იქნება დიაგრამებისა და ანგარიშების ფაილები.
- დააყენეთ დაბალანსების პარამეტრები “დაბალანსების პარამეტრებში”.
- გავლენის კოეფიციენტი: აირჩიეთ “ახალი როტორი” (კალიბრაციისთვის ორი გაშვება) ან “შენახული კოეფიციენტები” (ერთი გაშვება, იმავე ტიპის მანქანისთვის შენახული გავლენის კოეფიციენტებით).
- საცდელი წონის მასა: აირჩიეთ “გრამი” ან “პროცენტი”. თუ გეგმავთ მოგვიანებით “შენახული კოეფ.” რეჟიმის გამოყენებას, შეიყვანეთ საცდელი წონა მასა გრამებში (დაწონეთ სასწორზე).
- წონის მიმაგრების მეთოდი: აირჩიეთ “წრეწირის” (ნებისმიერი კუთხე წრეწირზე) ან “ფიქსირებული პოზიცია” (ფიქსირებული ნახვრეტები/ლესნები/პოზიციები; შეიყვანეთ პოზიციების რაოდენობა).
- მასის მიმაგრების რადიუსი: შეიყვანეთ რადიუსი, რომელიც გამოიყენება საცდელი და საკორექციო წონების დასამაგრებლად.
- დატოვეთ საცდელი წონა Plane1-ში: ჩართეთ ეს მხოლოდ იმ შემთხვევაში, თუ პროცესის განმავლობაში საცდელი წონის მოხსნა არ შეგიძლიათ.
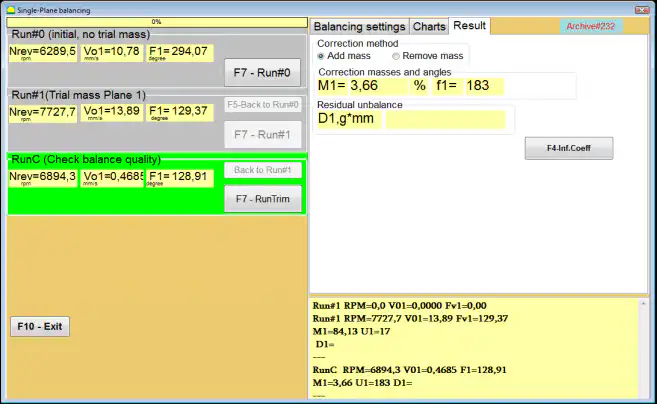
- Run #0 (საწყისი გაშვება, საცდელი წონის გარეშე). მიიყვანეთ დანადგარი სტაბილურ სიჩქარემდე და გაუშვით “Run #0” საწყისი ვიბრაციის გასაზომად. პროგრამული უზრუნველყოფა აღრიცხავს ბრუნებს წუთში (RPM), კვადრატული საშუალოს (RMS) მნიშვნელობასა და 1× ვიბრაციული კომპონენტის ფაზას. “გრაფიკების” ჩანართი აჩვენებს ტალღის ფორმასა და სპექტრს.
- დააყენეთ საცდელი წონა. შეაჩერეთ დანადგარი და დაამონტაჟეთ საცდელი წონა ცნობილ რადიუსზე. საცდელმა წონამ მნიშვნელოვნად უნდა შეცვალოს ვიბრაციის ამპლიტუდა ან ფაზა. გავრცელებული კრიტერიუმია “30/30-ის წესი”: საცდელმა წონამ ამპლიტუდა უნდა შეცვალოს დაახლოებით 30%-ით (დაბლა ან მაღლა), ხოლო ფაზა — დაახლოებით 30°-ით ან მეტი. თუ გეგმავთ მოგვიანებით “შენახული კოეფ.” რეჟიმის გამოყენებას, საცდელი წონა დაამონტაჟეთ იმავე კუთხეზე, რაზეც ასახვადი ნიშნულია.
- Run #1 (საცდელი წონა დამონტაჟებულია). გადატვირთეთ დანადგარი, დაელოდეთ სტაბილურ სიჩქარეს და შეასრულეთ “Run #1”. პროგრამული უზრუნველყოფა ითვლის კორექტირებული წონის პარამეტრებს.
- დააყენეთ საკორექციო წონა. შეაჩერეთ მანქანა, მოხსენით საცდელი წონა და დაამონტაჟეთ კორექციის წონა. სამონტაჟო კუთხე ითვლება საცდელი წონის პოზიციიდან როტორის ბრუნვის მიმართულებით. დამონტაჟეთ გამოსასწორებელი წონა იმავე რადიუსზე, როგორც საცდელი წონა.
- RunTrim (ბალანსის ხარისხის შემოწმება). შეასრულეთ “RunTrim” შედეგის გადასამოწმებლად. თუ ნარჩენი ვიბრაცია და/ან ნარჩენი დისბალანსი შეესაბამება დაშვებას, დაბალანსება შეიძლება დასრულდეს. წინააღმდეგ შემთხვევაში, პროგრამული უზრუნველყოფა ითვლის დამატებით საკორექციო წონას და დაბალანსება გრძელდება თანმიმდევრული მიახლოებებით.
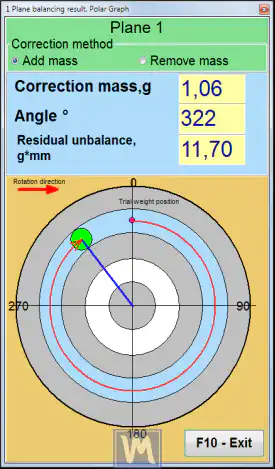
შედეგის ვიზუალიზაცია: პოლარული გრაფიკი და ფიქსირებული პოზიციები
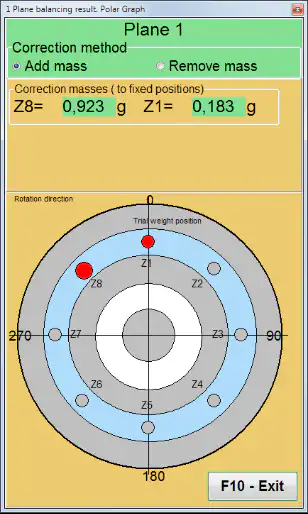
Balanset-1A-ს შეუძლია კორექციული წონის მასისა და კუთხის ჩვენება პოლარული კოორდინატების ხედი. თუ არჩეულია “ფიქსირებული პოზიცია”, პროგრამას შეუძლია კორექტირებული წონის ავტომატურად გაყოფა ორ ნაწილად და აჩვენოს პოზიციების ნომრები, სადაც თითოეული ნაწილი უნდა დამონტაჟდეს — ეს მოხერხებულობა ასახულია ფრთების კორექციის კალკულატორი ფანებისა და იმპელერებისთვის ფიქსირებული სამონტაჟო წერტილებით.
4. შედეგის შემოწმება დაშვებული ცდომილების წინააღმდეგ
სტატიკური ბალანსირება “დასრულებულია” მხოლოდ მაშინ, როდესაც ნარჩენი ვიბრაცია და ნარჩენი დისბალანსი შედის შეთანხმებულ დაშვებაში, და სწორედ აქ ამართლებს RunTrim ეტაპი. დასაშვები ნარჩენი დისბალანსი, როგორც წესი, მიიღება ბალანსის ხარისხის G-კლასი თანამედროვე ISO 21940-11 სტანდარტი (რომელმაც შეითვისა უფრო ძველი ISO 1940-1). G-ხარისხისა და ექსპლუატაციის სიჩქარის გარდაქმნა დასაშვებ გრამ-მილიმეტრულ მაჩვენებლად — და გონივრული საწყისი სატესტო წონის შერჩევა — სწრაფია ნარჩენი დაუბალანსებლობის კალკულატორი (ISO 21940-11) და ა საცდელი წონის კალკულატორი. თავდაპირველი და საბოლოო ნარჩენი არათანაბრობის ჩაწერა გვაძლევს სამუშაოს ეფექტიანობის ობიექტურ შეფასებას და წარმოადგენს დაბალანსების ანგარიშის საფუძველს.
5. შეზღუდვები
სტატიკური დაბალანსების მთავარი შეზღუდვაა მომენტის დისბალანსის აღმოჩენისა და გამოსწორების უუნარობა. სტატიკური დაბალანსების გამოყენებამ იმ როტორზე, რომელსაც სინამდვილეში დინამიკური დისბალანსი აქვს, ზოგჯერ შეიძლება მდგომარეობა გააუარესოს — ძალის კომპონენტი გასწორდეს, ხოლო მომენტის კომპონენტი უგულებელყოფილი დარჩეს ან მეტადაც გამწვავდეს. ამ მიზეზით, სამრეწველო დანადგარების უმეტესობისთვის სტანდარტული და სავალდებულო პრაქტიკაა ორსიბრტყიანი დინამიკური დაბალანსება, ხოლო სტატიკური დაბალანსება უმჯობესია ვიწრო, დისკისებრი როტორებისთვის, სადაც მისი ერთსიბრტყიანი დაშვება რეალურად გამართლებულია.