স্ট্যাটিক ব্যালেন্সিং বোঝা (একক-প্লেন ব্যালেন্সিং)







স্ট্যাটিক ব্যালেন্সিং রোটরের সবচেয়ে সরল ফর্ম ব্যালেন্সিং। এটি সংশোধন করে স্থির অভারসাম্য — একটি অবস্থা যাতে একটি রটারর ভর কেন্দ্র এর ঘূর্ণন অক্ষ থেকে বিপথগামী, একটি একক "ভারী স্থান" তৈরি করে। কারণ সেই ভারী স্থান নিজেকে শুধুমাত্র মাধ্যাকর্ষণের অধীনে প্রকাশ করে, সংশোধন নীতিগতভাবে রোটর স্থির থাকাকালীন সম্পাদন করা যেতে পারে: একটি বিশুদ্ধ স্ট্যাটিক সহ একটি রোটর রাখুন অসাম্য ছুরি প্রান্তের মতো ঘর্ষণমুক্ত পৃষ্ঠে, এবং এটি ভারী স্থান নিচে স্থির না হওয়া পর্যন্ত গড়িয়ে যাবে। সংশোধন একটিতে তৈরি করা হয় একক প্লেন — ভারী স্থানের বিপরীত 180° স্থানে রাখা একটি সংশোধন ওজন ভরের কেন্দ্রকে ঘূর্ণনের কেন্দ্রে ফিরিয়ে আনতে। সেই একক-সমতল সরলতা পদ্ধতির মহান শক্তি, এবং যেমন আমরা দেখব, এর সংজ্ঞায়িত সীমাবদ্ধতাও।
১. স্ট্যাটিক আনব্যালেন্স বনাম ডায়নামিক আনব্যালেন্স
স্ট্যাটিক অসন্তুলন একটি "শক্তি অসন্তুলন" এও বলা হয়, কারণ এটি একটি তৈরি করে কেন্দ্রবিমুখী শক্তি ঘূর্ণন কেন্দ্র থেকে রেডিয়ালি বাইরের দিকে কাজ করে। গুরুত্বপূর্ণভাবে, এটি কোন "যুগল" বা দুলানোর গতি তৈরি করে না। এটি আলাদা করে গতিশীল ভারসাম্যহীনতা, যা শক্তি এবং একত্রিত করে যুগল ভারসাম্যহীনতা এবং সম্পূর্ণভাবে সমাধান করতে কমপক্ষে দুটি সমতলে সংশোধন প্রয়োজন। একটি রোটর নিখুঁতভাবে স্ট্যাটিক্যালি ভারসাম্যপূর্ণ হতে পারে এবং তবুও একটি উল্লেখযোগ্য যুগল অসন্তুলন বহন করতে পারে যা এটি ঘোরানোর সময় গুরুতরভাবে কম্পিত করে — যা স্ট্যাটিক ভারসাম্য, নিজে থেকে, শুধুমাত্র একটি বিশেষ শ্রেণীর রোটরের জন্য উপযুক্ত।
2. স্ট্যাটিক ভারসাম্য কখন যথেষ্ট?
স্ট্যাটিক ভারসাম্য শুধুমাত্র নির্দিষ্ট শ্রেণীর রোটরগুলির জন্য উপযুক্ত। এটি সাধারণত উপাদানগুলির জন্য সংরক্ষিত থাকে যা অত্যন্ত সংকীর্ণ বা ডিস্ক-আকৃতির, যেখানে অক্ষীয় দৈর্ঘ্য ব্যাসের তুলনায় ছোট। এই ধরনের রোটরগুলির জন্য, একটি উল্লেখযোগ্য যুগল অসন্তুলন প্রথমে বিদ্যমান থাকার সম্ভাবনা অসম্ভব, তাই একক-সমতল সংশোধন সত্যিই সমস্যার সমাধান করে।
সাধারণ উদাহরণ যেখানে একক-সমতল স্ট্যাটিক ভারসাম্য প্রায়ই যথেষ্ট:
- গ্রাইন্ডিং চাকা
- অটোমোটিভ চাকা এবং টায়ার
- একক, সংকীর্ণ ফ্যান বা ব্লোয়ার চাকা
- ফ্লাইহুইল
- পুলি এবং শিভস
উল্লেখযোগ্য দৈর্ঘ্যের যেকোনো রোটরের জন্য — একটি মোটর আর্মেচার, একটি বহু-পর্যায়ের পাম্প, বা একটি দীর্ঘ শ্যাফ্ট — স্ট্যাটিক ভারসাম্য একা অপর্যাপ্ত এবং গতিশীল ভারসাম্য তে দুটি প্লেন প্রয়োজন। একক-সমতল পদ্ধতি নিজেই এর পরে আরও বর্ণনা করা হয়েছে একক-সমতল ব্যালান্সিং.
3. স্ট্যাটিক ব্যালান্সিং এর পদ্ধতিসমূহ
1. ছুরির ধার ব্যালান্সিং
এটি ক্লাসিক, অ-ঘূর্ণনশীল পদ্ধতি। রোটরটি সমান্তরাল, সমতল, কম-ঘর্ষণ ছুরির ধারের একটি জোড়ায় রাখা হয়। এটি রোল করে যতক্ষণ না এর সবচেয়ে ভারী বিন্দু নীচে থাকে; তখন শীর্ষে একটি অস্থায়ী ওজন (180° বিপরীত) যোগ করা হয় যতক্ষণ না রোটর যেকোনো অবস্থানে বিনা রোল করে বিশ্রাম নেবে। সেই ওজনটি তখন স্থায়ী করা হয়। এর কোনো শক্তি এবং কোনো ইলেকট্রনিক্স লাগে না — শুধুমাত্র ধৈর্য এবং একটি সত্য, সমতল ছুরির ধারের জোড়া — এবং এটি একটি সংকীর্ণ ডিস্কের জন্য একটি নিখুঁত ক্ষেত্র পরীক্ষা হিসাবে থাকে।
2. উল্লম্ব ব্যালান্সিং মেশিন
আধুনিক স্ট্যাটিক ব্যালান্সিং প্রায়শই একটি উল্লম্ব ভারসাম্য মেশিনএ সম্পন্ন হয়। রোটর — একটি ফ্লাইহুইল বা একটি টায়ার, যেমন বলুন — একটি অনুভূমিক প্লেটে বসে থাকে যা বল সেন্সর দ্বারা সমর্থিত। মেশিনটি এটিকে কম গতিতে স্পিন করে, এবং সেন্সরগুলি অসন্তুলনের শক্তি এবং দিকের মান পরিমাপ করে, স্ক্রিনে প্রয়োজনীয় সংশোধন প্রদর্শন করে। চাকা এবং টায়ারের জন্য বিশেষভাবে, একটি wheel-balancing-weights calculator সেই পাঠকটিকে ক্লিপ-অন বা আঠালো ওজনের আকারে রূপান্তরিত করে।
৩. একক-প্লেন ফিল্ড ব্যালেন্সিং (Balanset-1A)
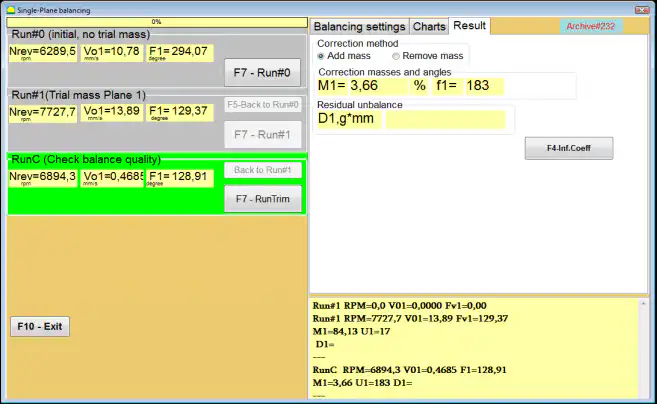
স্ট্যাটিক (একক-সমতল) ব্যালান্সিং একটি সম্পূর্ণভাবে সমাবেশকৃত মেশিনে একটি পোর্টেবল ব্যালান্সিং সিস্টেম ব্যবহার করে সম্পন্ন করা যায় — এর সারমর্ম ফিল্ড ব্যালেন্সিং। এর সাহায্যে Balanset-1Aদ্বারা, “এক সমতলে ব্যালান্সিং (‘স্ট্যাটিক’)” মোড রোটর গতি (RPM) এবং এর ভেক্টর পরিমাপ করে 1× কম্পন — এর RMS মান এবং ফেজ। “চালান #0” এবং “চালান #1” পরিমাপ থেকে, সফটওয়্যার স্বয়ংক্রিয়ভাবে ভর এবং ইনস্টলেশন কোণ সংশোধন ওজনের গণনা করে যা রোটরের অসন্তুলন কমাতে প্রয়োজন, ব্যবহার করে ইনফ্লুয়েন্স-কোয়েফিসিয়েন্ট পদ্ধতি।
ব্যালান্সিং ফলাফলগুলি একটি আর্কাইভে সংরক্ষিত হয়, এবং সমাপ্তিতে একটি ভারসাম্যকরণ প্রতিবেদন অন্তর্নির্মিত প্রতিবেদন সম্পাদকে তৈরি, সম্পাদনা এবং মুদ্রণ করা যায়।
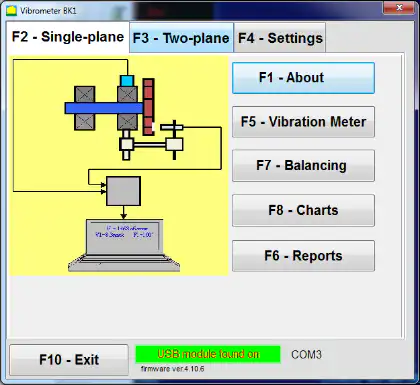
Balanset-1A প্রোগ্রামে একক-সমতল ব্যালান্সিং কীভাবে সম্পন্ন করা হয়
- সেন্সর ইনস্টল করুন এবং সিস্টেম সংযুক্ত করুন। নির্বাচিত পরিমাপ বিন্দুতে কম্পন সেন্সর ইনস্টল করুন এবং এটি ডিভাইসে সংযুক্ত করুন। পর্যায় সেন্সর ইনস্টল করুন (টাকোমিটার), প্রয়োগ করুন প্রতিফলিত টেপ রোটরের উপর, এবং ডিভাইসটি একটি Windows ল্যাপটপের সাথে সংযুক্ত করুন।
- এক-সংশোধন-তল ভারসাম্যকরণ মোড শুরু করুন। প্রধান অপারেটিং উইন্ডোতে “একক-সমতল” মোড নির্বাচন করুন এবং ব্যালান্সিং শুরু করুন। প্রোগ্রামটি একক-সমতল ব্যালান্সিং আর্কাইভ উইন্ডো খোলে।
- একটি আর্কাইভ রেকর্ড তৈরি করুন। রোটর নাম, ইনস্টলেশনের স্থান, সহনশীলতা (কম্পন এবং অবশিষ্ট অসন্তুলন), এবং তারিখ প্রবেশ করুন। সফটওয়্যার একটি আর্কাইভ ফোল্ডার তৈরি করে যেখানে চার্ট এবং প্রতিবেদন ফাইলগুলি সংরক্ষিত হবে।
- “ব্যালান্সিং সেটিংসে” ব্যালান্সিং প্যারামিটার সেট করুন।
- প্রভাব সহগ: “নতুন রোটর” (ক্যালিব্রেট করার জন্য দুটি রান) বা “সংরক্ষিত coeff.” (একটি রান, একই ধরনের মেশিনের জন্য সংরক্ষিত প্রভাব সহগ সহ) নির্বাচন করুন।
- পরীক্ষামূলক ওজনের ভর: “গ্রাম” বা “শতাংশ” নির্বাচন করুন। যদি আপনি পরে “সংরক্ষিত coeff.” মোড ব্যবহার করার পরিকল্পনা করেন, তবে ট্রায়াল ওয়েট ভর গ্রামে (স্কেলে ওজন করুন)।
- ওজন সংযুক্তি পদ্ধতি: “পরিধি” (পরিধিতে যে কোনো কোণ) বা “স্থির অবস্থান” (স্থির ছিদ্র/ব্লেড/অবস্থান; অবস্থানের সংখ্যা প্রবেশ করুন) নির্বাচন করুন।
- ভর সংযুক্তি ব্যাসার্ধ: পরীক্ষামূলক এবং সংশোধন ওজন মাউন্ট করার জন্য ব্যবহৃত ব্যাসার্ধ প্রবেশ করুন।
- সমতল1 এ পরীক্ষামূলক ওজন রেখে দিন: এই বিকল্পটি শুধুমাত্র সক্ষম করুন যদি আপনি প্রক্রিয়ার সময় পরীক্ষামূলক ওজন অপসারণ করতে না পারেন।
- চালান #0 (প্রাথমিক চালান, কোনো পরীক্ষামূলক ওজন নেই)। মেশিনটিকে স্থিতিশীল গতিতে আনুন এবং প্রাথমিক কম্পন পরিমাপ করার জন্য “Run #0” শুরু করুন। সফটওয়্যারটি RPM, RMS মান এবং 1× কম্পন উপাদানের দশা রেকর্ড করে। “Charts” ট্যাবটি তরঙ্গরূপ এবং বর্ণালী দেখায়।
- পরীক্ষামূলক ওজন ইনস্টল করুন। মেশিনটি বন্ধ করুন এবং একটি পরিচিত ব্যাসার্ধে পরীক্ষামূলক ওজন স্থাপন করুন। পরীক্ষামূলক ওজন কম্পন বিস্তার বা দশাকে উল্লেখযোগ্যভাবে পরিবর্তন করতে হবে। একটি সাধারণ মানদণ্ড হল “30/30 নিয়ম”: পরীক্ষামূলক ওজন বিস্তারকে প্রায় 30% (নিম্ন বা উচ্চ) দ্বারা বা দশাকে প্রায় 30° বা তার বেশি দ্বারা পরিবর্তন করা উচিত। যদি আপনি পরে “Saved coeff.” মোড ব্যবহার করার পরিকল্পনা করেন, প্রতিফলক চিহ্নের সমান কোণে পরীক্ষামূলক ওজন স্থাপন করুন।
- চালান #1 (পরীক্ষামূলক ওজন ইনস্টল করা)। মেশিনটি পুনরায় শুরু করুন, স্থিতিশীল গতির জন্য অপেক্ষা করুন এবং “Run #1” সম্পাদন করুন। সফটওয়্যারটি সংশোধনমূলক ওজন পরামিতি গণনা করে।
- সংশোধন ওজন ইনস্টল করুন। মেশিনটি বন্ধ করুন, পরীক্ষামূলক ওজন সরান এবং সংশোধন ভার। ঘূর্ণন পরীক্ষামূলক ওজন অবস্থান থেকে ঘূর্ণনের দিকে স্থাপন কোণ গণনা করা হয়। সংশোধন ওজনটি পরীক্ষামূলক ওজনের সমান ব্যাসার্ধে স্থাপন করুন।
- RunTrim (ভারসাম্য গুণমান পরীক্ষা করুন)। ফলাফল যাচাই করার জন্য “RunTrim” সম্পাদন করুন। যদি অবশিষ্ট কম্পন এবং/অথবা অবশিষ্ট ভারসাম্যহীনতা সহনশীলতা পূরণ করে, ভারসাম্য সম্পূর্ণ করা যায়। যদি না হয়, সফটওয়্যারটি একটি অতিরিক্ত সংশোধনমূলক ওজন গণনা করে এবং ভারসাম্য ক্রমাগত অনুমান দ্বারা চলতে থাকে।
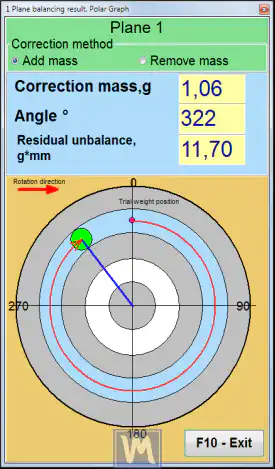
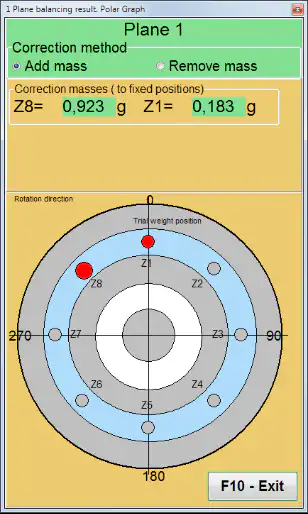
ফলাফল ভিজ্যুয়ালাইজেশন: মেরু গ্রাফ এবং স্থির অবস্থান
Balanset-1A সংশোধন ওজনের ভর এবং কোণ একটি পোলার স্থানাঙ্ক দৃশ্যপ্রদর্শন করতে পারে। যদি “Fixed position” নির্বাচিত হয়, প্রোগ্রামটি স্বয়ংক্রিয়ভাবে সংশোধনমূলক ওজনকে দুটি অংশে বিভক্ত করতে পারে এবং অবস্থান সংখ্যা দেখাতে পারে যেখানে প্রতিটি অংশ স্থাপন করতে হবে — একটি সুবিধা ব্লেড-সংশোধন ক্যালকুলেটর ফ্যান এবং impellers এর জন্য স্থির মাউন্টিং পয়েন্ট সহ।
4. সহনশীলতার বিরুদ্ধে ফলাফল যাচাই করা
একটি স্থির ভারসাম্য শুধুমাত্র “সমাপ্ত” হয় যখন অবশিষ্ট কম্পন এবং অবশিষ্ট ভারসাম্যহীনতা একটি সম্মত সহনশীলতার মধ্যে পড়ে, যেখানে RunTrim ধাপ এর মূল্য রয়েছে। অনুমোদিত অবশিষ্ট ভারসাম্যহীনতা সাধারণত একটি ভারসাম্য-গুণমান G-গ্রেড আধুনিকের অধীন ISO 21940-11 মান থেকে আঁকা হয় (যা পুরানো ISO 1940-1 শোষণ করেছে)। একটি G-গ্রেড এবং একটি সেবা গতিকে একটি অনুমোদিত গ্রাম-মিলিমিটার চিত্রে রূপান্তর করা — এবং একটি বিচক্ষণ প্রথম পরীক্ষা ওজন নির্বাচন করা — একটির সাথে দ্রুত অবশিষ্ট-অসমতা ক্যালকুলেটর (ISO 21940-11) এবং একটি পরীক্ষামূলক-ভার ক্যালকুলেটর। প্রাথমিক এবং চূড়ান্ত অবশিষ্ট ভারসাম্যহীনতা উভয়ই রেকর্ড করা কাজটি কতটা কার্যকর ছিল তার একটি সৎ পরিমাপ প্রদান করে এবং ভারসাম্য রিপোর্টের মূল গঠন করে।
৫. সীমাবদ্ধতা
স্ট্যাটিক ব্যালান্সিং এর প্রধান সীমাবদ্ধতা হল এটি কাপল আনব্যালান্স শনাক্ত করতে বা সংশোধন করতে অক্ষম। যে রোটরে আসলে ডায়নামিক আনব্যালান্স রয়েছে তাতে স্ট্যাটিক ব্যালান্স প্রয়োগ করলে কখনও কখনও পরিস্থিতি আরও খারাপ করতে পারে — বল উপাদান সংশোধন করার সময় কাপল উপাদান উপেক্ষা করা বা এমনকি আরও খারাপ করা। এই কারণে, বেশিরভাগ শিল্প মেশিনারির জন্য, দুই-প্ল্যান ডায়নামিক ব্যালান্সিং হল মান এবং প্রয়োজনীয় অনুশীলন, এবং স্ট্যাটিক ব্যালান্সিং সংকীর্ণ, ডিস্ক-আকৃতির রোটরগুলির জন্য সেরা সংরক্ষিত যেখানে এর একক-প্ল্যান ধারণা সত্যিকারের ধারণ করে।