Statiskās balansēšanas izpratne (vienas plaknes balansēšana)







Statiskā balansēšana ir rotora vienkāršākā forma balansēšana. Tas labo statiskais disbalanss — stāvoklis, kurā rotorsrotora masas centrs ir novirzīts no tā rotācijas ass, radot vienu „smaguma punktu”. Tā kā šis smaguma punkts parādās vienīgi gravitācijas ietekmē, korekciju principā var veikt, rotoram atrodoties nekustīgā stāvoklī: novietojiet rotoru ar tīru statisko nelīdzsvarotība uz virsmas bez berzes, piemēram, uz naža asmens, un tas ripos, līdz smagākais punkts nosēžas apakšā. Korekcija tiek veikta viena plakne — viens korekcijas svars, kas novietots 180° leņķī pret smaguma punktu, lai atgrieztu masas centru uz rotācijas centru. Šī vienkāršība, kas balstās uz vienu plakni, ir šīs metodes lielākā priekšrocība un, kā mēs redzēsim, arī tās galvenais ierobežojums.
1. Statiskais disbalanss pret dinamisko disbalansu
Statisko nelīdzsvarotību dēvē arī par „spēku nelīdzsvarotību“, jo tā rada centrbēdzes spēks kas darbojas radiāli uz āru no rotācijas centra. Būtiski, ka tas nerada nekādu „griezes momentu“ vai šūpojošu kustību. Tas to atšķir no dinamiskais disbalanss, kas apvieno spēku un pāra nelīdzsvarotība un tā pilnīgai novēršanai ir nepieciešami labojumi vismaz divās plaknēs. Rotors var būt ideāli statiski sabalansēts, bet tajā joprojām var būt ievērojams griezes momenta nelīdzsvarotība, kas izraisa spēcīgas vibrācijas, tiklīdz tas sāk griezties — tieši tāpēc statiskā balansēšana pati par sevi ir piemērota tikai noteiktas klases rotoriem.
2. Kad pietiek ar statisko balansēšanu?
Statiskā balansēšana ir piemērota tikai noteiktas klases rotoriem. Parasti to izmanto detaļām, kas ir ļoti šauras vai diska formas, kurām ass garums ir neliels salīdzinājumā ar diametru. Šādiem rotoriem jau sākotnēji ir maz ticams, ka pastāvētu nozīmīgs griezes momenta nelīdzsvarotība, tāpēc problēmu patiešām var atrisināt ar vienplaknes korekciju.
Bieži sastopami piemēri, kad pietiek ar vienplaknes statisko balansēšanu, ir šādi:
- Slīpripas
- Automašīnu riteņi un riepas
- Viens, šaurs ventilatora vai pūtēja ritenis
- Spararati
- Skriemeļi un skriemeļi
Jebkuram ievērojama garuma rotoram — motora armatūrai, daudzpakāpju sūknim vai garam vārpstam — vienīgi statiskā balansēšana nav pietiekama, un dinamiskā balansēšana iekšā divās plaknēs ir nepieciešams. Vienplaknes pieeja ir sīkāk aprakstīta sadaļā vienas plaknes balansēšana.
3. Statiskās balansēšanas metodes
1. Nažmalu balansēšana
Šī ir klasiskā metode bez rotācijas. Rotoru novieto uz divām paralēlām, līdzenām un mazslieces asmeņveida malām. Tas ripo, līdz tā smagākais punkts atrodas apakšā; pēc tam augšā (180° pretējā pusē) pievieno pagaidu svaru, līdz rotors apstājas jebkurā pozīcijā, neripojot. Tad šo svaru padara par pastāvīgu. Tam nav nepieciešama enerģija un elektronika — tikai pacietība un patiesi līdzena asmeņu pāra — un tas joprojām ir pilnīgi derīgs lauka pārbaudes veids šauram diskam.
2. Vertikālā balansēšanas mašīna
Mūsdienu statisko balansēšanu bieži veic vertikālā stāvoklī balansēšanas mašīna. Rotors — piemēram, svārsts vai riepa — atrodas uz horizontālas plāksnes, ko balsta spēka sensori. Ierīce to griež ar nelielu ātrumu, un sensori mēra nelīdzsvarotības spēka lielumu un virzienu, ekrānā parādot nepieciešamo korekciju. Konkrēti riteņiem un riepām, riepu balansēšanas svara aprēķinātājs pārvērš šos mērījumus par uzstādāmiem vai līmējamiem svara elementiem.
3. Vienas plaknes lauka balansēšana (Balanset-1A)
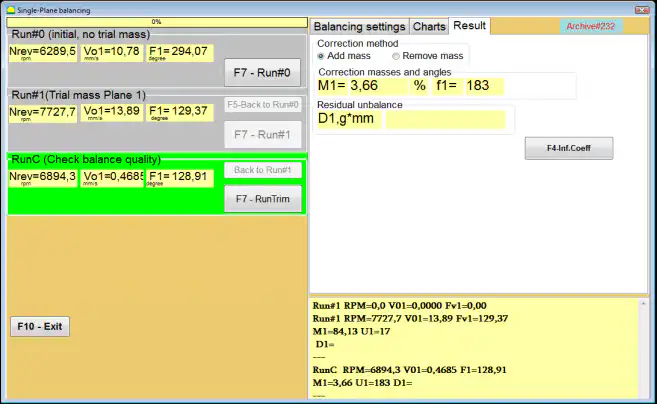
Statisko (vienplaknes) balansēšanu var veikt arī uz pilnībā samontētas mašīnas, izmantojot pārnēsājamo balansēšanas sistēmu — būtība ir lauka balansēšana. Ar Balanset-1A, režīmā „Līdzsvarošana vienā plaknē („statisks”)” tiek mērīts rotora apgriezienu skaits (RPM) un vektors 1× vibrācija - tās RMS vērtība un fāze. Pamatojoties uz „Run #0“ un „Run #1“ mērījumu rezultātiem, programma automātiski aprēķina masa un uzstādīšanas leņķis no korekcijas svara, kas nepieciešams, lai samazinātu rotora nelīdzsvarotību, izmantojot ietekmes koeficients metode.
Līdzsvarošanas rezultāti tiek saglabāti arhīvā, un pēc pabeigšanas bilances pārskats var izveidot, rediģēt un izdrukāt iebūvētajā pārskatu redaktorā.
Kā Balanset-1A programmā tiek veikta vienas plaknes balansēšana
- Uzstādiet sensorus un pievienojiet sistēmu. Uzstādiet vibrācijas sensoru izvēlētajā mērījumu punktā un pieslēdziet to ierīcei. Uzstādiet fāzes sensoru (tahometrs), piemēro atstarojoša lente uz rotora un pieslēdziet ierīci pie Windows klēpjdatora.
- Palaidiet vienas lidmašīnas balansēšanas režīmu. Galvenajā darbības logā izvēlieties režīmu „Vienā plaknē” un sāciet balansēšanu. Programma atvērs arhīva logu „Balansēšana vienā plaknē”.
- Izveidot arhīva ierakstu. Ievadiet rotora nosaukumu, uzstādīšanas vietu, pielaides (vibrācija un atlikušais nelīdzsvarotības lielums) un datumu. Programma izveido arhīva mapi, kurā tiks saglabāti diagrammu un atskaites faili.
- Iestatiet balansēšanas parametrus sadaļā „Balansēšanas iestatījumi“.
- Ietekmes koeficients: izvēlieties „Jauns rotors“ (divas kalibrēšanas ciklas) vai „Saglabātie koeficienti“ (viens cikls, ja iekārta ir tāda pati un ietekmes koeficienti ir saglabāti).
- Izmēģinājuma svara masa: izvēlieties „Gramm” vai „Procenti”. Ja plānojat vēlāk izmantot režīmu „Saglabātie koeficienti”, ievadiet izmēģinājuma svars masa gramos (nosveriet to uz svariem).
- Svara piestiprināšanas metode: izvēlieties „Circum“ (jebkurš leņķis pa perimetru) vai „Fixed position“ (fiksēti caurumi/asmeņi/pozīcijas; ievadiet pozīciju skaitu).
- Masas stiprinājuma rādiuss: ievadiet rādiusu, ko izmanto izmēģinājuma un korekcijas atsvaru montāžai.
- Atstāj izmēģinājuma svaru plaknē Plane1: ieslēdziet to tikai tad, ja procesa laikā nevarat noņemt izmēģinājuma svaru.
- Veiciet #0 (sākotnējais brauciens, bez izmēģinājuma svara). Nostādiet iekārtu uz stabilu apgriezienu skaitu un palaidiet „Run #0“, lai izmērītu sākotnējās vibrācijas. Programmatūra reģistrē apgriezienu skaitu minūtē, vidējo kvadrātisko vērtību un 1× vibrācijas komponentes fāzi. Sadaļā „Charts“ tiek parādīts viļņu formas un spektrs.
- Uzstādiet izmēģinājuma svaru. Apstādiniet iekārtu un uzstādiet pārbaudes svaru zināmā attālumā. Pārbaudes svaram ir ievērojami jāmaina vibrācijas amplitūda vai fāze. Parasti izmanto „30/30 likumu“: pārbaudes svaram ir jāmaina amplitūda aptuveni par 30 % (uz leju vai uz augšu) vai fāze par aptuveni 30° vai vairāk. Ja plānojat vēlāk izmantot režīmu „Saved coeff.”, uzstādiet pārbaudes svaru tādā pašā leņķī kā atstarotāju.
- Palaist #1 (uzstādīts izmēģinājuma svars). Pārstartējiet iekārtu, pagaidiet, līdz ātrums stabilizējas, un veiciet „1. ciklu“. Programmatūra aprēķina svara korekcijas parametrus.
- Uzstādiet korekcijas svaru. Apstādiniet mašīnu, noņemiet pārbaudes svaru un uzstādiet korekcijas svars. Uzstādīšanas leņķi mēra no pārbaudes svara novietojuma rotora griešanās virzienā. Uzstādiet korekcijas svaru uz tā paša rādiusa, uz kura atrodas pārbaudes svars.
- RunTrim (pārbaudīt līdzsvara kvalitāti). Izpildiet komandu „RunTrim“, lai pārbaudītu rezultātu. Ja paliek vibrācija un/vai atlikušais disbalanss ja tiek ievērota pielaide, balansēšanu var pabeigt. Ja nē, programma aprēķina papildu korekcijas svaru, un balansēšana turpinās, izmantojot secīgas tuvināšanas metodes.
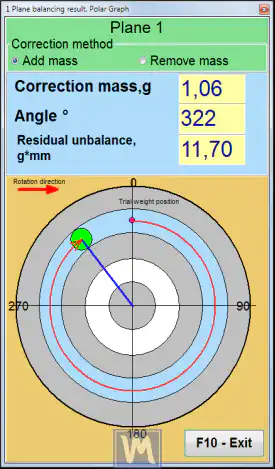
Rezultātu attēlošana: polārais grafiks un fiksētas pozīcijas
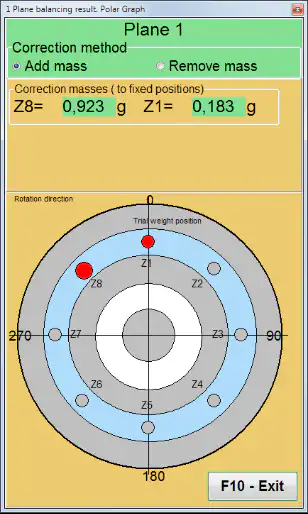
Balanset-1A var parādīt korekcijas svara masu un leņķi polāro koordinātu skats. Ja ir izvēlēta opcija „Fiksēta pozīcija”, programma var automātiski sadalīt korekcijas svaru divās daļās un parādīt pozīciju numurus, kurās katra daļa ir jāuzstāda — šī ērtība atspoguļojas arī asmeņa korekcijas kalkulators ventilatoriem un lāpstiņratņiem ar fiksētiem stiprinājuma punktiem.
4. Rezultāta salīdzināšana ar pielaidi
Statiskā balansēšana tiek uzskatīta par „pabeigtu“ tikai tad, ja atlikušās svārstības un atlikušais nelīdzsvarotības lielums atbilst noteiktām pielaidēm, un tieši šeit „RunTrim“ posms parāda savu vērtību. Pieļaujamais atlikušais nelīdzsvarotības lielums parasti tiek noteikts, ņemot vērā balansēšanas kvalitāti G klase mūsdienu apstākļos ISO 21940-11 standarts (kurā iekļauts iepriekšējais standarts ISO 1940-1). G-klases un darba ātruma pārrēķināšana pieļaujamajā gramu-milimetru rādītājā — kā arī saprātīga sākotnējā testa svara izvēle — notiek ātri, izmantojot atlikušā nelīdzsvarotības aprēķinātājs (ISO 21940-11) un a izmēģinājuma svara kalkulators. Reģistrējot gan sākotnējo, gan galīgo atlikušo nelīdzsvarotību, var precīzi novērtēt darba efektivitāti, un šie dati veido līdzsvarošanas ziņojuma galveno daļu.
5. Ierobežojumi
Galvenais statiskās balansēšanas trūkums ir nespēja noteikt vai novērst griezes momenta nelīdzsvarotību. Statiskās balansēšanas piemērošana rotoram, kam faktiski ir dinamiskais nelīdzsvarotums, dažkārt var situāciju vēl vairāk pasliktināt — koriģējot spēka komponenti, vienlaikus ignorējot vai pat pastiprinot momenta komponenti. Šā iemesla dēļ lielākajai daļai rūpniecisko iekārtu divplakņu dinamiskā balansēšana ir standarta un obligāta prakse, bet statiskā balansēšana ir vispiemērotākā šauriem, diska formas rotoriem, kuriem patiešām ir piemērojams vienplakņu pieņēmums.