Statik Dengelemeyi (Tek Düzlem Dengeleme) Anlama







Statik dengeleme rotorun en basit şeklidir balanslama. Bu düzeltir statik dengesizlik — bir durumdur ki, bir rotor‘nin kütle merkezi dönme ekseninden kaymıştır ve bu da tek bir “ağır nokta” oluşturur. Bu ağır nokta yalnızca yerçekimi altında kendini belli ettiği için, düzeltme prensipte rotor dururken yapılabilir: saf statik balanssızlık bıçak kenarı gibi sürtünmesiz bir yüzeyde, ağırlık altta sabitlenene kadar yuvarlanır. Düzeltme işlemi tek duzlem — ağırlık merkezini yeniden dönme merkezine getirmek için ağır noktanın tam 180° karşısına yerleştirilen tek bir düzeltme ağırlığı. Bu tek düzlemli sadelik, yöntem'in büyük gücüdür ve göreceğimiz gibi aynı zamanda belirleyici sınırlamasıdır.
1. Statik Dengesizlik ve Dinamik Dengesizlik
Statik dengesizliğe ayrıca “kuvvet dengesizliği” de denir, çünkü bu bir merkezkaç kuvveti dönüş merkezinden radyal olarak dışarı etki eder. Kritik nokta, hiçbir “couple” ya da sallanma hareketi oluşturmamasıdır. Bu da onu dinamik dengesizlik, güç ile çift dengesizliği ve tamamen giderilmesi için en az iki düzlemde düzeltme gerektirir. Bir rotor statik olarak mükemmel bir şekilde dengelenmiş olsa bile, dönmeye başladığında şiddetli titreşime neden olacak önemli bir tork dengesizliği barındırabilir — işte bu nedenle statik dengeleme, tek başına yalnızca belirli bir rotor sınıfı için uygun olur.
2. Statik dengeleme ne zaman yeterlidir?
Statik dengeleme yalnızca belirli bir rotor sınıfı için uygundur. Bu yöntem genellikle, çapına kıyasla eksenel uzunluğu kısa olan, çok dar veya disk şeklindeki bileşenler için kullanılır. Bu tür rotorlarda, başlangıçta önemli bir tork dengesizliği olması pek olası değildir; bu nedenle tek düzlemli bir düzeltme, sorunu gerçekten çözer.
Tek düzlemli statik dengelemenin genellikle yeterli olduğu yaygın örnekler şunlardır:
- Taşlama taşları
- Otomobil jantları ve lastikleri
- Tek, dar fan veya üfleyici çarkları
- Volanlar
- Kasnaklar ve makaralar
Önemli uzunluktaki herhangi bir rotor için — motor armatürü, çok kademeli bir pompa veya uzun bir şaft — sadece statik dengeleme yetersiz kalır ve dinamik dengeleme içinde iki uçak gerekmektedir. Tek düzlemli yaklaşımın kendisi, şu bölümde daha ayrıntılı olarak açıklanmaktadır: tek düzlem dengeleme.
3. Statik Dengeleme Yöntemleri
1. Bıçak Sırtı Dengeleme
Bu, klasik, dönmeyen yöntemdir. Rotor, birbirine paralel, düz ve sürtünmesi az olan bir çift bıçak kenarının üzerine yerleştirilir. En ağır noktası aşağıya gelene kadar yuvarlanır; ardından rotor yuvarlanmadan herhangi bir konumda sabit kalana kadar üst kısmına (180° zıt noktada) geçici bir ağırlık eklenir. Daha sonra bu ağırlık kalıcı hale getirilir. Güç veya elektronik alet gerektirmez — sadece sabır ve düzgün, düz bir çift kenar yeterlidir — ve dar bir disk için mükemmel bir saha kontrolü olarak kalır.
2. Dikey Dengeleme Makinesi
Modern statik dengeleme genellikle dikey bir konumda yapılır dengeleme makinesi. Rotor — örneğin bir volan ya da lastik — kuvvet sensörleriyle desteklenen yatay bir plaka üzerinde yer alır. Makine bunu düşük hızda döndürür ve sensörler dengesizlik kuvvetinin büyüklüğünü ve yönünü ölçerek gerekli düzeltmeyi ekranda gösterir. Özellikle tekerlekler ve lastikler için, bir tekerlek dengeleme ağırlığı hesaplayıcı bu ölçüleri klipsli veya yapışkanlı ağırlık boyutlarına dönüştürür.
3. Tek Düzlemli Alan Dengeleme (Balanset-1A)
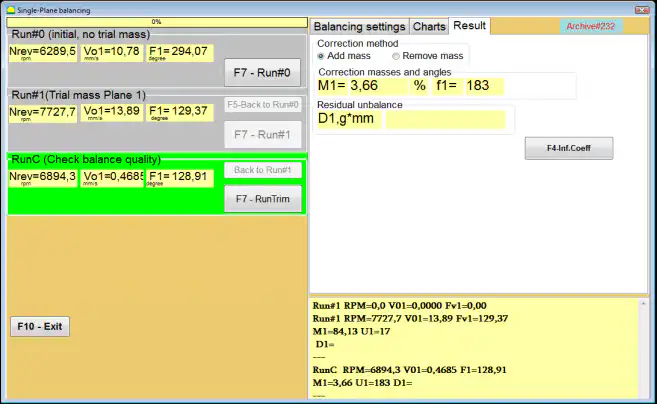
Statik (tek düzlemli) balans ayarı, taşınabilir bir balans sistemi kullanılarak tamamen monte edilmiş bir makine üzerinde de gerçekleştirilebilir — bu, yerinde balanslama. ile Balanset-1A, “Tek düzlemde balanslama (‘statik’)” modu rotor hızını (RPM) ve 1× titreşim - onun RMS değer ve faz. “Run #0” ve “Run #1” ölçümlerinden yazılım otomatik olarak kГјtle ve kurulum açısı rotor'un dengesizliğini azaltmak için gereken düzeltme ağırlığının etki katsayısı yöntem.
Dengeleme sonuçları bir arşive kaydedilir ve işlem tamamlandığında bir denge raporu yerleşik rapor düzenleyicide oluşturulabilir, düzenlenebilir ve yazdırılabilir.
Balanset-1A programında tek düzlemli dengeleme nasıl gerçekleştirilir?
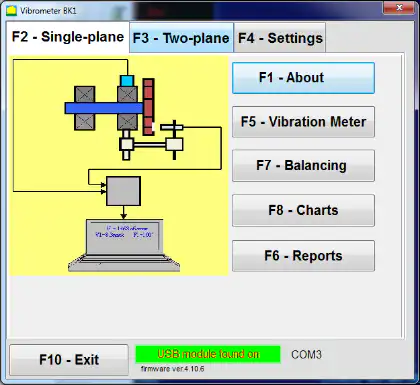
- Sensörleri kurun ve sistemi bağlayın. Titreşim sensörünü seçilen ölçüm noktasına takın ve cihaza bağlayın. Faz sensörünü takın (takometre), uygulayın yansıtıcı bant rotorun üzerine yerleştirin ve cihazı bir Windows dizüstü bilgisayara bağlayın.
- Tek Düzlemli Dengeleme modunu başlatın. Ana çalışma penceresinde “Tek düzlem” modunu seçin ve balanslamayı başlatın. Program tek düzlemli balanslama arşiv penceresini açar.
- Bir arşiv kaydı oluşturun. Rotorun adını, kurulum yerini, toleransları (titreşim ve kalıntı dengesizlik) ve tarihi girin. Yazılım, grafiklerin ve rapor dosyalarının kaydedileceği bir arşiv klasörü oluşturur.
- Balanslama parametrelerini “Balans ayarları” bölümünde ayarlayın.
- Etki katsayısı: "Yeni Rotor" (kalibrasyon için iki deneme) veya "Kaydedilmiş katsayılar" (aynı makine türü için kaydedilmiş etki katsayıları kullanılarak tek deneme) seçeneğini seçin.
- Deneme ağırlığı kütlesi: “Gramm” veya “Percent” seçin. Daha sonra “Saved coeff.” modunu kullanmayı planlıyorsanız, deneme ağırlığının deneme ağırlığı gram cinsinden kütle (tartıda tartın).
- Ağırlık Bağlama Yöntemi: “Circum” (çevre üzerindeki herhangi bir açı) veya “Fixed position” (sabit delikler/kanatlar/konumlar; konum sayısını girin) seçin.
- Kütle montaj yarıçapı: deneme ve düzeltme ağırlıklarını monte etmek için kullanılan yarıçapı girin.
- Deneme ağırlığını Plane1'de bırakın: Bunu yalnızca işlem sırasında deneme ağırlığını kaldıramıyorsanız etkinleştirin.
- #0'ı çalıştırın (ilk çalıştırma, deneme ağırlığı yok). Makineyi sabit hıza getirin ve başlangıç titreşimini ölçmek için “Run #0” komutunu başlatın. Yazılım RPM, RMS değeri ve 1× titreşim bileşeninin fazını kaydeder. “Charts” sekmesi dalga formunu ve spektrumu gösterir.
- Deneme ağırlığını takın. Makineyi durdurun ve deneme ağırlığını bilinen bir yarıçapa takın. Deneme ağırlığı titreşim genliğini ya da fazını belirgin şekilde değiştirmelidir. Yaygın bir ölçüt “30/30 kuralı”dır: deneme ağırlığı genliği yaklaşık (azaltarak ya da artırarak) veya fazı yaklaşık 30° ya da daha fazla değiştirmelidir. Daha sonra “Saved coeff.” modunu kullanmayı planlıyorsanız, deneme ağırlığını yansıtıcı işaretle aynı açıya yerleştirin.
- #1'i çalıştırın (deneme ağırlığı yüklü). Makineyi yeniden başlatın, hız kararlı hale gelince bekleyin ve “Run #1” işlemini yapın. Yazılım düzeltme ağırlığı parametrelerini hesaplar.
- Düzeltme ağırlığını takın. Makineyi durdurun, deneme ağırlığını çıkarın ve düzeltme ağırlığı. Montaj açısı, deneme ağırlığının bulunduğu konumdan rotorun dönüş yönünde hesaplanır. Düzeltme ağırlığını deneme ağırlığıyla aynı yarıçap üzerine monte edin.
- RunTrim (balans kalitesini kontrol edin). Sonucu doğrulamak için “RunTrim” işlemini gerçekleştirin. Kalan titreşim ve/veya artık balanssızlık Tolerans aralığına uyulursa, dengeleme işlemi tamamlanabilir. Aksi takdirde, yazılım ek bir düzeltme ağırlığı hesaplar ve dengeleme işlemi art arda yapılan yaklaşımlarla devam eder.
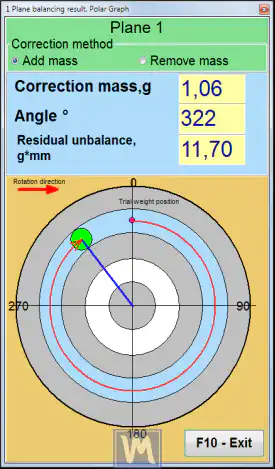
Sonuçların görselleştirilmesi: kutupsal grafik ve sabit konumlar
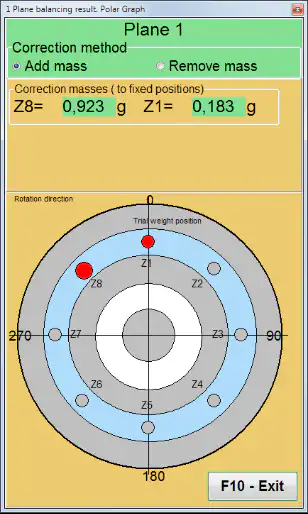
Balanset-1A, düzeltme ağırlığı'nın kütlesini ve açısını bir kutup koordinat sistemi. “Fixed position” seçildiğinde, program düzeltme ağırlığını otomatik olarak iki parçaya bölebilir ve her parçanın takılması gereken konum numaralarını gösterebilir — bu kolaylık, bıçak düzeltme hesaplayıcısı sabit montaj noktalarına sahip fanlar ve pervaneler için.
4. Sonucun Tolerans Değerleriyle Karşılaştırılması
Statik balans ancak kalıntı titreşim ve kalıntı dengesizlik, üzerinde anlaşılmış tolerans aralığına düştüğünde “tamamlanmış” sayılır; RunTrim adımının değeri tam da burada ortaya çıkar. İzin verilen kalıntı dengesizlik genellikle bir balans kalite G sınıfı modern çağda ISO 21940-11 standart (eski ISO 1940-1 standardını bünyesine alan). G derecesini ve hizmet hızını izin verilen gram-milimetre değerine dönüştürmek — ve makul bir ilk test ağırlığı seçmek — bir artık dengesizlik hesaplayıcı (ISO 21940-11) ve bir deneme ağırlığı hesaplayıcı. Hem başlangıçtaki hem de son durumdaki kalıntı dengesizliği kaydetmek, işlemin ne kadar etkili olduğunu doğru bir şekilde ölçer ve dengeleme raporunun temelini oluşturur.
5. Sınırlamalar
Statik dengelemenin en büyük sınırlaması, tork dengesizliğini tespit edememesi veya düzeltememesidir. Aslında dinamik dengesizliği olan bir rotora statik dengeleme uygulamak bazen durumu daha da kötüleştirebilir — kuvvet bileşenini düzeltirken tork bileşenini göz ardı etmek, hatta daha da kötüleştirmek. Bu nedenle, çoğu endüstriyel makine için iki düzlemli dinamik dengeleme standart ve gerekli bir uygulamadır ve statik dengeleme, tek düzlem varsayımının gerçekten geçerli olduğu dar, disk şeklindeki rotorlar için saklanmalıdır.