Förstå statisk balansering (balansering i ett plan)







Statisk balansering är den enklaste formen av rotorobalans balansering. Den korrigerar statisk obalans — ett tillstånd där en rotorrotorns masscentrum ligger förskjutet från dess rotationsaxel, vilket skapar en enda “tung punkt.” Eftersom denna tunga punkt avslöjar sig enbart genom tyngdkraften kan korrigeringen i princip utföras medan rotorn står stilla: placera en rotor med ren statisk obalans på en friktionsfri yta, till exempel en knivegg, och den kommer att rulla tills den tyngre delen hamnar längst ner. Läget åtgärdas genom att ett enda plan — en korrigeringsvikt placerad 180° mittemot tyngdpunkten för att återföra tyngdpunkten till rotationscentrum. Denna enkelhet i ett enda plan är metodens stora styrka och, som vi kommer att se, även dess avgörande begränsning.
1. Statisk obalans kontra dynamisk obalans
Statisk obalans kallas också ”kraftobalans”, eftersom den ger upphov till en centrifugalkraft som verkar radiellt utåt från rotationscentrum. Avgörande är att den inte ger upphov till något ”vridmoment” eller någon gungande rörelse. Det är detta som skiljer den från dynamisk obalans, som kombinerar kraft och parobalans och kräver korrigeringar i minst två plan för att uppnå fullständig balans. En rotor kan vara perfekt statiskt balanserad och ändå ha en betydande vridmomentobalans som gör att den vibrerar kraftigt när den snurrar – vilket är anledningen till att statisk balans i sig endast är lämplig för en viss typ av rotor.
2. När räcker det med statisk balansering?
Statisk balansering är endast lämplig för en viss typ av rotorer. Den används i allmänhet endast för komponenter som är mycket smala eller skivformade, där den axiella längden är liten i förhållande till diametern. För sådana rotorer är det osannolikt att det överhuvudtaget förekommer någon betydande vridmomentobalans, varför en korrigering i ett enda plan verkligen löser problemet.
Vanliga exempel där statisk balansering i ett plan ofta är tillräckligt är bland annat:
- Slipskivor
- Bilfälgar och däck
- Enkla, smala fläkt- eller blåshjul
- Svänghjul
- Remskivor och trissor
För alla rotorer av betydande längd – till exempel ett motorankare, en flerstegspump eller en lång axel – räcker det inte med enbart statisk balansering, och dynamisk balansering i två plan krävs. Metoden med ett enda plan beskrivs närmare under balansering i ett plan.
3. Metoder för statisk balansering
1. Knivkantsbalansering
Detta är den klassiska metoden utan rotation. Rotorn placeras på ett par parallella, vågräta knivkanter med låg friktion. Den rullar tills dess tyngsta punkt befinner sig längst ned; därefter läggs en tillfällig tyngd till på toppen (180° motsatt) tills rotorn stannar i valfri position utan att rulla vidare. Denna tyngd görs sedan permanent. Det kräver varken ström eller elektronik – bara tålamod och ett par raka, jämna kanter – och det är fortfarande en fullt giltig fältkontroll för en smal skiva.
2. Vertikal balanseringsmaskin
Modern statisk balansering utförs ofta på en vertikal balanseringsmaskin balanseringsmaskin. Rotorn – till exempel ett svänghjul eller ett däck – vilar på en horisontell platta som stöds av kraftsensorer. Maskinen snurrar den med låg hastighet, och sensorerna mäter storleken och riktningen på obalanskraften och visar den nödvändiga korrigeringen på en skärm. Speciellt för hjul och däck gäller att en Beräkningsverktyg för hjulbalanseringsvikter omvandlar dessa mått till storlekar för påsättnings- eller självhäftande vikter.
3. Balansering av fält i ett plan (Balanset-1A)
Statisk (enplans-) balansering kan även utföras på en färdigmonterad maskin med hjälp av ett bärbart balanseringssystem – kärnan i fältbalansering. Med Balanset-1A, läget ”Balansering i ett plan (’statisk’)” mäter rotorhastigheten (RPM) och vektorn för 1× vibration - dess RMS värde och fas. Utifrån mätningarna från “Run #0” och “Run #1” beräknar programvaran automatiskt parametrarna massa och installationsvinkel för den korrigeringsvikt som krävs för att minska rotorns obalans, med hjälp av influenskoefficient metod.
Balanseringsresultaten sparas i ett arkiv, och när processen är klar kan en balansrapport kan skapas, redigeras och skrivas ut i den inbyggda rapportredigeraren.
Hur balansering i ett plan utförs i Balanset-1A-programmet
- Installera sensorer och anslut systemet. Montera vibrationssensorn vid den valda mätpunkten och anslut den till enheten. Montera fassensorn (varvräknare), tillämpa reflekterande tejp på rotorn och anslut enheten till en Windows-bärbar dator.
- Starta läget Single-Plane Balancing. Välj läget ”Enplan” i huvudfönstret och starta balanseringen. Programmet öppnar arkivfönstret för enplansbalansering.
- Skapa en arkivpost. Ange rotorns namn, installationsplats, toleranser (vibrationer och kvarvarande obalans) samt datum. Programvaran skapar en arkivmapp där diagram och rapportfiler sparas.
- Ställ in balanseringsparametrarna under ”Balanseringsinställningar”.
- Influenskoefficient: Välj “Ny rotor” (två körningar för kalibrering) eller “Saved coeff.” (en körning, för samma maskintyp med sparade influenskoefficienter).
- Provviktsmassa: Välj ”Gramm” eller ”Procent”. Om du tänker använda läget ”Sparade koefficienter” senare, ange provvikt vikt i gram (väg den på vågen).
- Vikt Fastsättningsmetod: Välj ”Circum” (valfri vinkel på omkretsen) eller ”Fixed position” (fasta hål/blad/positioner; ange antalet positioner).
- Radie för massmontering: ange den radie som används för montering av försöks- och korrektionsvikterna.
- Lämna provvikten i Plane1: aktivera detta endast om du inte kan ta bort provvikten under processen.
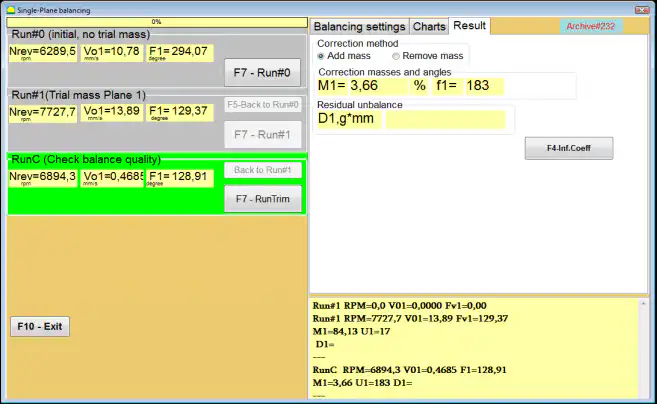
- Körning #0 (första körningen, ingen provvikt). Låt maskinen nå ett stabilt varvtal och starta ”Run #0” för att mäta den initiala vibrationen. Programvaran registrerar varvtal, RMS-värde och fas för den 1×-vibrationskomponenten. Fliken ”Diagram” visar vågformen och spektrumet.
- Montera provvikten. Stäng av maskinen och placera provvikten vid en känd radie. Provvikten måste ge upphov till en märkbar förändring av vibrationsamplituden eller fasen. Ett vanligt kriterium är “30/30-regeln”: provvikten bör förändra amplituden med cirka 30 % (nedåt eller uppåt) eller fasen med cirka 30° eller mer. Om du planerar att använda läget “Saved coeff.” senare ska du placera provvikten i samma vinkel som reflektionsmarkeringen.
- Kör #1 (provvikt installerad). Starta om maskinen, vänta tills hastigheten har stabiliserats och kör ”Körning nr 1”. Programvaran beräknar de korrigerande viktparametrarna.
- Installera korrektionsvikten. Stäng av maskinen, ta bort provvikten och montera den beräknade korrigeringsvikten korrigeringsvikt. Monteringsvinkeln mäts från provvikten i rotorns rotationsriktning. Montera korrigeringsvikten på samma radie som provvikten.
- RunTrim (kontrollera balanskvaliteten). Kör “RunTrim” för att kontrollera resultatet. Om restvibrationerna och/eller restobalansen kvarvarande obalans uppfyller toleransen kan balanseringen avslutas. Om så inte är fallet beräknar programvaran en ytterligare korrigeringsvikt och balanseringen fortsätter genom successiva approximationer.
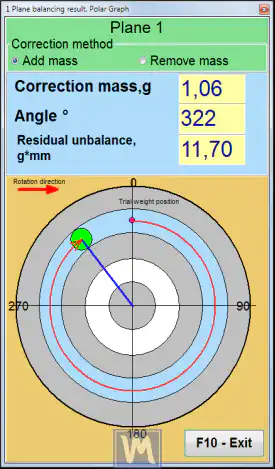
Resultatvisning: polärdiagram och fasta positioner
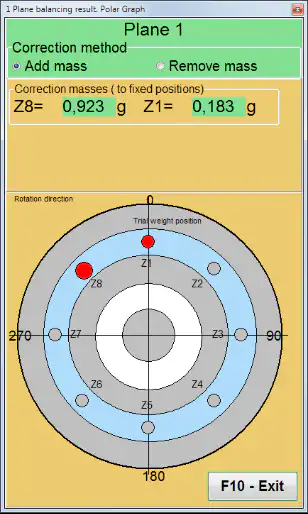
Balanset-1A kan visa korrigeringsviktens massa och vinkel i en polär koordinatvy. Om ”Fast position” är valt kan programmet automatiskt dela upp korrigeringsvikten i två delar och visa positionsnumren där varje del ska monteras — en funktion som återspeglas i kalkylator för bladkorrigering för fläktar och fläkthjul med fasta fästpunkter.
4. Kontroll av resultatet mot toleransvärdet
En statisk balansering anses vara ”klar” först när restvibrationerna och restobalansen ligger inom en överenskommen tolerans, och det är här RunTrim-steget kommer till sin rätt. Den tillåtna restobalansen fastställs normalt utifrån balanseringskvaliteten G-klass enligt den moderna ISO 21940-11 standarden (som ersatte den äldre ISO 1940-1). Att omvandla en G-klass och en driftshastighet till ett tillåtet gram-millimeter-värde – och välja en rimlig första provvikt – går snabbt med en beräkningsverktyg för restobalans (ISO 21940-11) och en provviktskalkylator. Genom att registrera både den initiala och den slutliga kvarvarande obalansen får man en rättvisande bild av hur effektivt arbetet var, och detta utgör kärnan i balansrapporten.
5. Begränsningar
Den främsta begränsningen med statisk balansering är att den inte kan upptäcka eller korrigera vridmomentobalans. Att tillämpa statisk balansering på en rotor som faktiskt har en dynamisk obalans kan ibland förvärra situationen – man korrigerar kraftkomponenten samtidigt som man ignorerar, eller till och med förvärrar, vridmomentskomponenten. Av denna anledning är tvåplansdynamisk balansering standard och ett krav för de flesta industriella maskiner, och statisk balansering bör helst reserveras för smala, skivformade rotorer där antagandet om en enda plan verkligen stämmer.