Hiểu về cân bằng tĩnh (cân bằng một mặt phẳng)







Cân bằng tĩnh là dạng đơn giản nhất của rô-to cân bằng. Nó sửa lỗi mất cân bằng tĩnh — một tình trạng trong đó một rôto‘Trọng tâm của nó lệch khỏi trục quay, tạo ra một “điểm nặng” duy nhất. Vì điểm nặng đó chỉ bộc lộ dưới tác động của trọng lực, nên về nguyên tắc, việc hiệu chỉnh có thể được thực hiện khi rô-to đang đứng yên: đặt một rô-to ở trạng thái tĩnh thuần túy mất cân bằng trên một bề mặt không ma sát như cạnh dao, và nó sẽ lăn cho đến khi điểm nặng nằm ở phía dưới. Việc hiệu chỉnh được thực hiện trên một máy bay đơn — một khối cân bằng được đặt ở vị trí đối diện 180° so với điểm nặng để đưa tâm khối lượng trở lại trùng với tâm quay. Sự đơn giản trong cùng một mặt phẳng chính là điểm mạnh lớn nhất của phương pháp này và, như chúng ta sẽ thấy, cũng là hạn chế cơ bản của nó.
1. Mất cân bằng tĩnh so với mất cân bằng động
Sự mất cân bằng tĩnh còn được gọi là “sự mất cân bằng lực”, bởi vì nó tạo ra một lực ly tâm tác động theo hướng xuyên tâm từ tâm quay. Điều quan trọng là, nó không tạo ra “mô-men xoắn” hay chuyển động lắc lư. Điều này giúp phân biệt nó với mất cân bằng động, kết hợp giữa mất cân bằng lực và cặp đôi mất cân bằng và cần hiệu chỉnh trên ít nhất hai mặt phẳng để khắc phục triệt để. Một rôto có thể được cân bằng tĩnh hoàn hảo nhưng vẫn mang mất cân bằng mô-men đáng kể, khiến nó rung mạnh khi quay — đó là lý do tại sao cân bằng tĩnh, tự thân nó, chỉ phù hợp với một nhóm rôto nhất định.
2. Khi nào thì cân bằng tĩnh là đủ?
Cân bằng tĩnh chỉ phù hợp với một loại rôto cụ thể. Phương pháp này thường được áp dụng cho các bộ phận có hình dạng rất hẹp hoặc hình đĩa, trong đó chiều dài trục nhỏ so với đường kính. Đối với các rôto như vậy, ngay từ đầu đã khó có khả năng xuất hiện sự mất cân bằng mô-men xoắn đáng kể, do đó việc hiệu chỉnh trên một mặt phẳng duy nhất thực sự có thể giải quyết vấn đề.
Một số ví dụ điển hình mà việc cân bằng tĩnh một mặt phẳng thường là đủ bao gồm:
- Đá mài
- Bánh xe và lốp xe ô tô
- Bánh xe quạt hoặc quạt thổi đơn, hẹp
- Bánh đà
- Ròng rọc và bánh xe
Đối với bất kỳ rôto nào có chiều dài đáng kể — như phần ứng động cơ, bơm nhiều cấp hoặc trục dài — thì chỉ cân bằng tĩnh là không đủ và Cân bằng động TRONG hai máy bay cần phải cân bằng động. Phương pháp một mặt phẳng được mô tả chi tiết hơn trong phần cân bằng mặt phẳng đơn.
3. Các phương pháp cân bằng tĩnh
1. Cân bằng lưỡi dao
Đây là phương pháp cổ điển, không quay. Rotor được đặt trên một cặp cạnh dao song song, bằng phẳng và có ma sát thấp. Nó lăn cho đến khi điểm nặng nhất nằm ở phía dưới; sau đó, một vật nặng tạm thời được đặt lên phía trên (ngược chiều 180°) cho đến khi rotor dừng lại ở bất kỳ vị trí nào mà không lăn nữa. Vật nặng đó sau đó được cố định vĩnh viễn. Phương pháp này không cần nguồn điện hay thiết bị điện tử — chỉ cần sự kiên nhẫn và một cặp cạnh thẳng, bằng phẳng — và nó vẫn là một phương pháp kiểm tra thực địa hoàn toàn hợp lệ đối với đĩa hẹp.
2. Máy cân bằng đứng
Cân bằng tĩnh hiện đại thường được thực hiện trên máy cân bằng đứng máy cân bằng. Rôto — ví dụ như bánh đà hoặc lốp xe — được đặt trên một tấm ngang được đỡ bởi các cảm biến lực. Máy quay rôto ở tốc độ thấp, và các cảm biến đo độ lớn cũng như hướng của lực mất cân bằng, rồi hiển thị hiệu chỉnh cần thiết trên màn hình. Riêng đối với bánh xe và lốp xe, một Công cụ tính toán trọng lượng cân bằng bánh xe chuyển đổi số đo đó thành các kích cỡ tạ kẹp hoặc tạ dán.
3. Cân bằng tại hiện trường một mặt phẳng (Balanset-1A)
Việc cân bằng tĩnh (một mặt phẳng) cũng có thể được thực hiện trên máy đã lắp ráp hoàn chỉnh bằng hệ thống cân bằng di động — đúng như bản chất của cân bằng tại hiện trường. Với Balanset-1A, chế độ “Cân bằng trong một mặt phẳng (‘tĩnh’)” đo tốc độ quay của rôto (RPM) và vectơ của Dao động 1× — của nó RMS giá trị và pha. Dựa trên các kết quả đo “Run #0” và “Run #1”, phần mềm sẽ tự động tính toán khối and Góc lắp đặt của khối lượng hiệu chỉnh cần thiết để giảm mất cân bằng của rôto, bằng cách sử dụng hệ số ảnh hưởng phương pháp.
Kết quả cân bằng được lưu vào kho lưu trữ, và khi hoàn tất, một báo cáo cân bằng có thể được tạo, chỉnh sửa và in trong trình soạn thảo báo cáo tích hợp sẵn.
Cách thực hiện cân bằng một mặt phẳng trong chương trình Balanset-1A
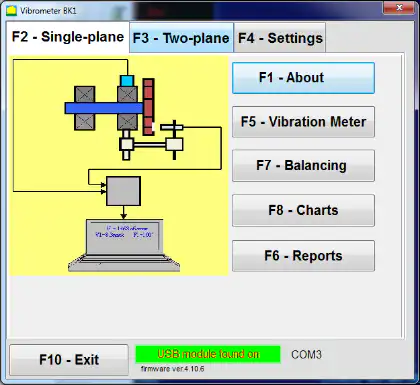
- Lắp đặt cảm biến và kết nối hệ thống. Lắp đặt cảm biến rung tại điểm đo đã chọn và kết nối nó với thiết bị. Lắp đặt cảm biến pha (máy đo tốc độ quay), dán Băng phản quang lên rôto, và kết nối thiết bị với máy tính xách tay Windows.
- Bắt đầu chế độ cân bằng một mặt phẳng. Trong cửa sổ điều khiển chính, hãy chọn chế độ “Một mặt phẳng” và bắt đầu cân bằng. Chương trình sẽ mở cửa sổ lưu trữ dữ liệu cân bằng một mặt phẳng.
- Tạo bản ghi lưu trữ. Nhập tên rôto, vị trí lắp đặt, các giá trị dung sai (rung động và độ lệch cân bằng dư) và ngày tháng. Phần mềm sẽ tạo một thư mục lưu trữ để lưu các biểu đồ và tệp báo cáo.
- Đặt các thông số cân bằng trong phần “Cài đặt cân bằng”.
- Hệ số ảnh hưởng: Chọn “Rotor mới” (cần hai lần chạy để hiệu chuẩn) hoặc “Hệ số đã lưu” (chỉ cần một lần chạy, dành cho cùng loại máy có hệ số ảnh hưởng đã được lưu).
- Khối lượng thử nghiệm: Chọn “Gramm” hoặc “Percent”. Nếu bạn dự định sử dụng chế độ “Saved coeff.” sau này, hãy nhập trọng lượng thử nghiệm khối lượng tính bằng gam (cân trên cân).
- Phương pháp gắn trọng lượng: Chọn “Circum” (bất kỳ góc nào trên chu vi) hoặc “Fixed position” (lỗ/lưỡi dao/vị trí cố định; nhập số lượng vị trí).
- Bán kính gắn khối: Nhập bán kính dùng để lắp quả nặng thử và quả nặng hiệu chỉnh.
- Giữ trọng lượng thử nghiệm trong Plane1: Chỉ kích hoạt tùy chọn này nếu bạn không thể loại bỏ trọng lượng thử nghiệm trong quá trình thực hiện.
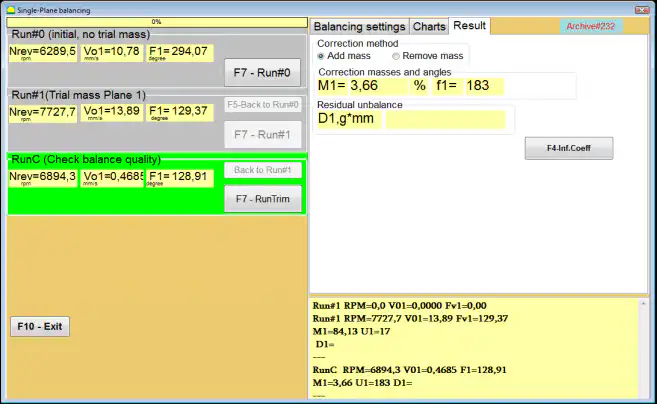
- Chạy #0 (chạy ban đầu, không có quả nặng thử). Đưa máy về tốc độ ổn định và khởi chạy “Run #0” để đo độ rung ban đầu. Phần mềm sẽ ghi lại số vòng quay trên phút (RPM), giá trị RMS và pha của thành phần rung 1×. Tab “Charts” hiển thị dạng sóng và phổ.
- Lắp đặt trọng lượng thử nghiệm. Tắt máy và lắp đặt trọng lượng thử nghiệm tại một bán kính đã biết. Trọng lượng thử nghiệm phải làm thay đổi biên độ hoặc pha dao động một cách đáng kể. Một tiêu chí phổ biến là “quy tắc 30/30”: trọng lượng thử nghiệm nên làm thay đổi biên độ khoảng 30% (thấp hơn hoặc cao hơn) hoặc pha khoảng 30° trở lên. Nếu bạn dự định sử dụng chế độ “Saved coeff.” sau này, hãy lắp đặt trọng lượng thử nghiệm ở cùng góc với dấu phản xạ.
- Chạy #1 (trọng lượng thử nghiệm đã cài đặt). Khởi động lại máy, đợi cho đến khi tốc độ ổn định, sau đó thực hiện lệnh “Run #1”. Phần mềm sẽ tính toán các thông số cân chỉnh.
- Lắp đặt trọng lượng hiệu chỉnh. Tắt máy, tháo trọng lượng thử nghiệm và lắp đặt trọng lượng hiệu chỉnh. Góc lắp đặt được tính từ vị trí của trọng lượng thử nghiệm theo hướng quay của rô-to. Lắp trọng lượng hiệu chỉnh vào cùng bán kính với trọng lượng thử nghiệm.
- RunTrim (kiểm tra chất lượng cân bằng). Thực hiện lệnh “RunTrim” để kiểm tra kết quả. Nếu còn rung động dư và/hoặc mất cân bằng còn lại Nếu đáp ứng được dung sai, quá trình cân bằng có thể được hoàn tất. Nếu không, phần mềm sẽ tính toán thêm một khối lượng hiệu chỉnh và quá trình cân bằng tiếp tục bằng phương pháp xấp xỉ lặp đi lặp lại.
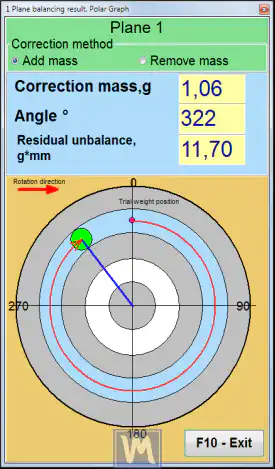
Hiển thị kết quả: đồ thị cực và các vị trí cố định
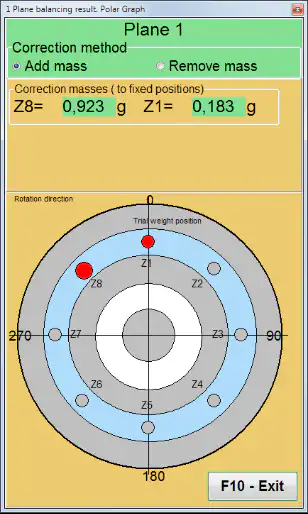
Balanset-1A có thể hiển thị khối lượng và góc của trọng lượng hiệu chỉnh trong một Hệ tọa độ cực. Nếu chọn “Vị trí cố định”, chương trình có thể tự động chia trọng lượng điều chỉnh thành hai phần và hiển thị số vị trí mà mỗi phần phải được lắp đặt — một tính năng tiện lợi được phản ánh qua máy tính hiệu chỉnh lưỡi dao dành cho quạt và cánh quạt có điểm lắp cố định.
4. Kiểm tra kết quả so với giới hạn dung sai
Việc cân bằng tĩnh chỉ được coi là “hoàn tất” khi độ rung dư và độ lệch cân bằng dư nằm trong giới hạn dung sai đã thỏa thuận, và đây chính là lúc bước RunTrim phát huy tác dụng. Giá trị độ lệch cân bằng dư cho phép thường được xác định dựa trên tiêu chuẩn chất lượng cân bằng Cấp G theo phong cách hiện đại Tiêu chuẩn ISO 21940-11 tiêu chuẩn (đã thay thế tiêu chuẩn cũ ISO 1940-1). Việc chuyển đổi cấp G và tốc độ vận hành thành giá trị gram-milimet cho phép — và chọn một trọng lượng thử nghiệm ban đầu hợp lý — có thể thực hiện nhanh chóng với một Công cụ tính toán sai lệch dư (ISO 21940-11) và một Công cụ tính trọng lượng thử nghiệm. Việc ghi nhận cả độ lệch dư ban đầu và cuối cùng sẽ cho thấy mức độ hiệu quả thực sự của công việc và là nội dung cốt lõi của báo cáo cân bằng.
5. Hạn chế
Hạn chế chính của phương pháp cân bằng tĩnh là không thể phát hiện hoặc khắc phục sự mất cân bằng mô-men. Áp dụng cân bằng tĩnh cho một rôto thực sự có sự mất cân bằng động đôi khi có thể làm tình hình trở nên tồi tệ hơn — khắc phục thành phần lực trong khi bỏ qua, hoặc thậm chí làm trầm trọng thêm, thành phần mô-men. Vì lý do này, đối với hầu hết các máy móc công nghiệp, cân bằng động hai mặt phẳng là tiêu chuẩn và thực hành bắt buộc, còn cân bằng tĩnh tốt nhất nên được dành cho các rôto hẹp, hình đĩa, nơi giả định một mặt phẳng của nó thực sự đúng.