Statinio balansavimo supratimas (vienos plokštumos balansavimas)







Statinis balansavimas yra paprasčiausia rotoriaus balansavimo forma balansavimas. Jis ištaiso statinis disbalansas — būklė, kai rotoriusJo masės centras yra nukrypęs nuo sukimosi ašies, todėl susidaro viena „sunkioji vieta“. Kadangi ši sunkioji vieta atsiskleidžia veikiant vien tik gravitacijai, koregavimą iš principo galima atlikti rotoriui esant ramybėje: pastatykite rotorių, kurio jėgos yra vien tik statinės disbalansas ant mažos trinties paviršiaus, pavyzdžiui, peilių briaunų, ir jis riedės tol, kol sunki vieta nusileis į apačią. Tai ištaisoma viena plokštuma — vienas korekcinis svoris, išdėstytas 180° kampu priešingoje pusėje nuo sunkiojo taško, kad masės centras vėl sutaptų su sukimosi centru. Ši vienos plokštumos paprastumas yra didžiausias šio metodo privalumas ir, kaip matysime, taip pat jo esminis trūkumas.
1. Statinis disbalansas ir dinaminis disbalansas
Statinis disbalansas dar vadinamas „jėgos disbalansu“, nes jis sukelia išcentrinė jėga veikiantis radialiai į išorę nuo sukimosi centro. Svarbiausia, kad jis nesukuria jokio „sukimo momento“ ar svyravimo judesio. Tai jį išskiria nuo dinaminis disbalansas, kuri suderina jėgą ir poros disbalansas ir norint visiškai pašalinti šį disbalansą, reikia atlikti koregavimus bent dviejose plokštumose. Rotorius gali būti puikiai subalansuotas statiniu būdu, tačiau vis tiek turėti didelį sukimo momento disbalansą, dėl kurio jis smarkiai vibruoja, kai pradeda suktis – būtent todėl vien tik statinis balansavimas tinka tik tam tikros klasės rotoriams.
2. Kada pakanka atlikti statinį balansavimą?
Statinis balansavimas tinka tik tam tikros klasės rotoriams. Paprastai jis taikomas labai siauriems arba disko formos elementams, kurių ašinis ilgis yra nedidelis, palyginti su skersmeniu. Tokių rotorių atveju iš esmės mažai tikėtina, kad susidarytų didelis sukimo momento disbalansas, todėl balansavimas vienoje plokštumoje iš tikrųjų išsprendžia problemą.
Dažniausiai vienos plokštumos statinis balansavimas yra pakankamas šiais atvejais:
- Šlifavimo diskai
- Automobilių ratai ir padangos
- Vieni, siauri ventiliatoriaus arba pūstuvo ratai
- Smagračiai
- Skriemuliai ir skriemuliai
Bet kokio didelio ilgio rotoriui – variklio ankerei, daugiapakopiam siurbliui ar ilgam velenui – vien tik statinis balansavimas yra nepakankamas ir dinaminis balansavimas į dvi plokštumos yra būtinas. Pats vienos plokštumos metodas išsamiau aprašytas skyriuje vienos plokštumos balansavimas.
3. Statinio balansavimo metodai
1. Peilio ašmenų balansavimas
Tai klasikinis, nesukamasis metodas. Rotorius padedamas ant dviejų lygiagrečių, lygaus paviršiaus ir mažos trinties peilių ašmenų. Jis rieda tol, kol sunkiausia jo vieta atsiduria apačioje; tada viršuje (180° priešingoje pusėje) pridedamas laikinas svoris, kol rotorius sustoja bet kurioje padėtyje ir neberieda. Tada tas svoris tampa nuolatinis. Tam nereikia jokios energijos ir elektronikos – tik kantrybės ir tikros, lygios peilių poros – ir tai lieka puikiai tinkamas siauro disko patikrinimas lauke.
2. Vertikalus balansavimo aparatas
Šiuolaikinis statinis balansavimas dažnai atliekamas vertikalioje padėtyje balansavimo mašina. Rotorius – tarkim, smagratis arba padanga – yra uždėtas ant horizontalaus pagrindo, kurį laiko jėgos jutikliai. Įrenginys jį suka nedideliu greičiu, o jutikliai matuoja disbalanso jėgos dydį ir kryptį bei ekrane rodo reikiamą koregavimą. Kalbant konkrečiai apie ratus ir padangas, ratų balansavimo svarelių skaičiuoklė paverčia šiuos matavimus į užsegamų arba lipnių svarelių dydžius.
3. Vienos plokštumos lauko balansavimas (Balanset-1A)
Statinis (vienos plokštumos) balansavimas taip pat gali būti atliekamas ant visiškai surinktos mašinos naudojant nešiojamą balansavimo sistemą — esmė yra lauko balansavimas. Su Balanset-1A, režimas „Balansavimas vienoje plokštumoje („statinis“)“ matuoja rotoriaus greitį (aps/min) ir 1× vibracija - jos RMS vertė ir fazė. Remiantis „Run #0“ ir „Run #1“ matavimais, programa automatiškai apskaičiuoja masė ir montavimo kampą korekcinio svorio, reikalingo rotoriaus disbalansui sumažinti, naudojant įtakos koeficientas metodas.
Balansavimo rezultatai išsaugomi archyve, o užbaigus balansinė ataskaita juos galima kurti, redaguoti ir spausdinti naudojantis įdiegtu ataskaitų redaktoriumi.
Kaip Balanset-1A programoje atliekamas vienos plokštumos balansavimas
- Įdiekite jutiklius ir prijunkite sistemą. Pritvirtinkite vibracijos jutiklį pasirinktame matavimo taške ir prijunkite jį prie prietaiso. Pritvirtinkite fazės jutiklį (tachometras), taikyti atspindinti juosta ant rotoriaus ir prijunkite įrenginį prie „Windows“ nešiojamojo kompiuterio.
- Įjunkite vienos plokštumos balansavimo režimą. Pagrindiniame darbo lange pasirinkite režimą „Viena plokštuma“ ir pradėkite balansavimą. Programa atidarys balansavimo vienoje plokštumoje archyvo langą.
- Sukurkite archyvinį įrašą. Įveskite rotoriaus pavadinimą, montavimo vietą, leistinas nuokrypas (vibracija ir liekamasis disbalansas) bei datą. Programa sukurs archyvo aplanką, kuriame bus išsaugoti diagramos ir ataskaitų failai.
- Nustatykite balansavimo parametrus skyriuje „Balansavimo nustatymai“.
- Įtakos koeficientas: pasirinkite „Naujas rotorius“ (reikia atlikti du bandymus kalibravimui) arba „Išsaugoti koeficientai“ (vienas bandymas, skirtas to paties tipo mašinai, turinčiai išsaugotus įtakos koeficientus).
- Bandomoji masė: pasirinkite „Gramm“ arba „Percent“. Jei ketinate vėliau naudoti režimą „Saved coeff.“, įveskite bandomasis svoris masė gramais (pasverkite svarstyklėmis).
- Svorio tvirtinimo būdas: pasirinkite „Circum“ (bet koks kampas apskritimo atžvilgiu) arba „Fixed position“ (fiksuotos skylės/peiliai/padėtys; įveskite padėčių skaičių).
- Masės tvirtinimo spindulys: įveskite spindulį, naudojamą bandomiesiems ir korekciniams svoriams tvirtinti.
- Palikite bandomąjį svorį plokštumoje Plane1: įjunkite šią funkciją tik tuo atveju, jei proceso metu negalite pašalinti bandomojo svorio.
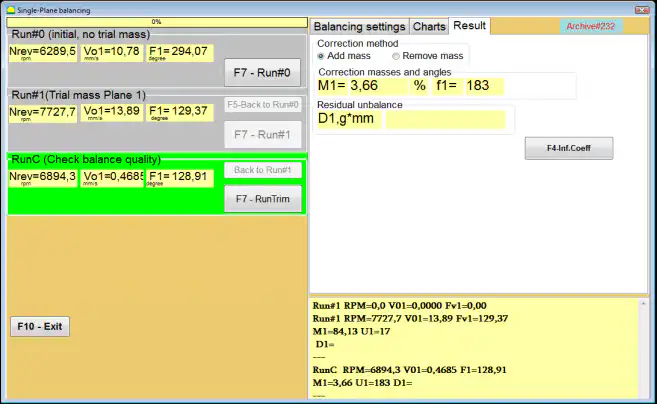
- Atlikite #0 bandymą (pradinis bandymas, be bandomosios masės). Nustatykite stabilų mašinos greitį ir paleiskite „Run #0“, kad išmatuotumėte pradinį vibracijos lygį. Programa užregistruoja apsisukimų skaičių per minutę (RPM), vidutinę kvadratinę vertę (RMS) ir 1× vibracijos komponento fazę. Skirtuke „Diagramos“ rodomos bangos forma ir spektras.
- Sumontuokite bandomąjį svorį. Išjunkite įrenginį ir pritvirtinkite bandomąjį svorį žinomame spindulyje. Bandomasis svoris turi žymiai pakeisti vibracijos amplitudę arba fazę. Dažnai taikomas kriterijus yra „30/30 taisyklė“: bandomasis svoris turėtų pakeisti amplitudę maždaug 30 % (sumažinti arba padidinti) arba fazę maždaug 30° ar daugiau. Jei vėliau ketinate naudoti režimą „Išsaugoti koeficientai“, pritvirtinkite bandomąjį svorį tuo pačiu kampu kaip ir atspindžio žymę.
- Paleiskite #1 (įdiegtas bandomasis svoris). Iš naujo paleiskite įrenginį, palaukite, kol pasieks pastovų greitį, ir atlikite „1-ąjį bandymą“. Programa apskaičiuos korekcinius svorio parametrus.
- Sumontuokite korekcinį svorį. Išjunkite mašiną, nuimkite bandomąjį svorį ir įdėkite korekcinis svoris. Montavimo kampas skaičiuojamas nuo bandomojo svorio padėties rotoriaus sukimosi kryptimi. Korekcinį svorį pritvirtinkite tame pačiame spindulyje kaip ir bandomąjį svorį.
- RunTrim (balanso kokybės tikrinimas). Paleiskite „RunTrim“, kad patikrintumėte rezultatą. Jei liekamasis virpesys ir (arba) likutinis disbalansas Jei atitinka leistiną nuokrypį, balansavimas gali būti baigtas. Jei ne, programa apskaičiuoja papildomą korekcinį svarelį ir balansavimas tęsiamas taikant pakopinius artinimus.
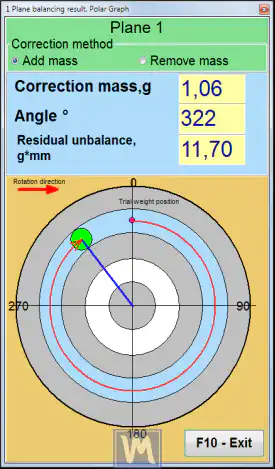
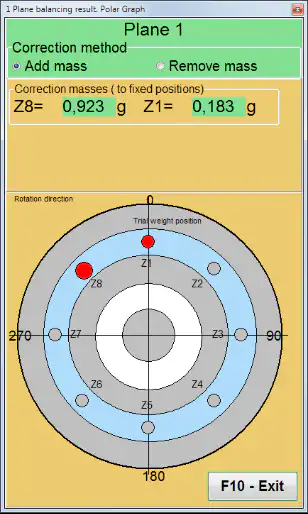
Rezultatų vaizdavimas: poliarinis grafikas ir fiksuotos pozicijos
„Balanset-1A“ gali rodyti korekcinio svorio masę ir kampą poliarinių koordinačių vaizdas. Jei pasirinkta „Fiksuota vieta“, programa gali automatiškai padalyti korekcinį svorį į dvi dalis ir parodyti vietų numerius, kur turi būti sumontuota kiekviena dalis — šis patogumas atsispindi peilio koregavimo skaičiuoklė skirtas ventiliatoriams ir sparnuotėms su fiksuotais tvirtinimo taškais.
4. Rezultato palyginimas su leistina nuokrypa
Statinis balansavimas laikomas „baigtu“ tik tada, kai liekamasis virpesys ir liekamasis disbalansas neviršija nustatytų leistinų nuokrypių ribų – būtent čia „RunTrim“ etapas parodo savo vertę. Leistinas liekamasis disbalansas paprastai nustatomas pagal balansavimo kokybės G klasės pagal šiuolaikinį ISO 21940-11 standartas (kuris pakeitė senesnį ISO 1940-1). G klasės ir eksploatacinio greičio perskaičiavimas į leistiną gramų-milimetrų rodiklį – ir tinkamo pirmojo bandymo svorio parinkimas – atliekamas greitai naudojant likutinio disbalanso skaičiuoklė (ISO 21940-11) ir a bandomojo svorio skaičiuoklė. Užregistravus tiek pradinį, tiek galutinį likutinį disbalansą, gaunamas tikslus darbo efektyvumo įvertinimas, kuris sudaro balansavimo ataskaitos pagrindą.
5. Apribojimai
Pagrindinis statinio balansavimo trūkumas yra tai, kad jis negali aptikti ar ištaisyti sukimo momento disbalanso. Statinio balansavimo taikymas rotoriui, kuris iš tikrųjų turi dinaminį disbalansą, kartais gali pabloginti padėtį – ištaisant jėgos komponentą, ignoruojant arba netgi sustiprinant sukimo momento komponentą. Dėl šios priežasties daugumai pramoninių mašinų dviejų plokštumų dinaminis balansavimas yra standartinė ir privaloma praktika, o statinis balansavimas geriausiai tinka siauriems, disko formos rotoriams, kur tikrai galioja vienos plokštumos prielaida.