Memahami Penyeimbangan Statis (Penyeimbangan Bidang Tunggal)







Penyeimbangan statis adalah bentuk rotor yang paling sederhana penyeimbangan. Ini mengoreksi ketidakseimbangan statis — suatu kondisi di mana sebuah rotorPusat massa rotor tersebut tidak sejajar dengan sumbu rotasinya, sehingga membentuk satu “titik berat”. Karena titik berat tersebut hanya terdeteksi akibat pengaruh gravitasi, koreksi tersebut pada prinsipnya dapat dilakukan saat rotor dalam keadaan diam: letakkan rotor dalam keadaan statis murni ketidakseimbangan pada permukaan yang licin seperti tepi pisau, dan benda tersebut akan berguling hingga bagian yang lebih berat berada di bagian bawah. Perbaikan dilakukan dengan cara bidang tunggal — satu beban koreksi yang ditempatkan pada sudut 180° berlawanan dengan titik berat untuk mengembalikan pusat massa ke pusat rotasi. Kesederhanaan dalam satu bidang inilah yang menjadi keunggulan utama metode ini dan, seperti yang akan kita lihat, juga menjadi keterbatasannya yang mendasar.
1. Ketidakseimbangan Statis vs Ketidakseimbangan Dinamis
Ketidakseimbangan statis juga disebut “ketidakseimbangan gaya,” karena hal itu menimbulkan gaya sentrifugal bergerak secara radial ke arah luar dari pusat rotasi. Yang terpenting, hal ini tidak menimbulkan “torsi” atau gerakan bergoyang. Hal itulah yang membedakannya dari ketidakseimbangan dinamis, yang memadukan kekuatan dan ketidakseimbangan pasangan dan memerlukan koreksi pada setidaknya dua bidang agar dapat diselesaikan sepenuhnya. Sebuah rotor dapat memiliki keseimbangan statis yang sempurna namun tetap memiliki ketidakseimbangan torsi yang signifikan, yang menyebabkan rotor tersebut bergetar hebat begitu berputar — itulah sebabnya keseimbangan statis, jika dilakukan sendiri, hanya cocok untuk jenis rotor tertentu.
2. Kapan Penyeimbangan Statis Sudah Cukup?
Penyeimbangan statis hanya cocok untuk jenis rotor tertentu. Metode ini umumnya digunakan untuk komponen yang sangat ramping atau berbentuk cakram, di mana panjang aksialnya jauh lebih kecil dibandingkan dengan diameternya. Untuk rotor semacam itu, kemungkinan besar tidak ada ketidakseimbangan torsi yang signifikan sejak awal, sehingga koreksi satu bidang benar-benar dapat mengatasi masalah tersebut.
Contoh umum di mana penyeimbangan statis satu bidang sering kali sudah cukup antara lain:
- Roda gerinda
- Roda dan ban kendaraan bermotor
- Roda kipas atau blower tunggal dan sempit
- Roda gila
- Katrol dan sheave
Untuk setiap rotor dengan panjang yang cukup besar — seperti armatur motor, pompa bertingkat, atau poros panjang — penyeimbangan statis saja tidak cukup dan penyeimbangan dinamis di dalam dua pesawat diperlukan. Pendekatan satu bidang itu sendiri dijelaskan lebih lanjut di bawah penyeimbangan bidang tunggal.
3. Metode Penyeimbangan Statis
1. Penyeimbangan Ujung Pisau
Ini adalah metode klasik yang tidak melibatkan perputaran. Rotor diletakkan di atas sepasang tepi pisau yang sejajar, rata, dan bergesekan rendah. Rotor tersebut berguling hingga titik terberatnya berada di bagian bawah; kemudian ditambahkan beban sementara di bagian atas (berlawanan 180°) hingga rotor dapat berhenti di posisi mana pun tanpa berguling. Beban tersebut kemudian dipasang secara permanen. Metode ini tidak memerlukan daya atau perangkat elektronik — hanya kesabaran dan sepasang tepi yang benar-benar rata — dan tetap menjadi pemeriksaan lapangan yang sangat valid untuk cakram yang sempit.
2. Mesin Penyeimbang Vertikal
Penyeimbangan statis modern sering dilakukan pada mesin vertikal mesin penyeimbang. Rotor — misalnya, sebuah roda gila atau ban — diletakkan di atas pelat horizontal yang ditopang oleh sensor gaya. Mesin memutarnya dengan kecepatan rendah, dan sensor mengukur besar serta arah gaya ketidakseimbangan, lalu menampilkan koreksi yang diperlukan di layar. Khusus untuk roda dan ban, sebuah kalkulator pemberat penyeimbang roda mengubah ukuran bacaan tersebut menjadi ukuran pemberat yang dapat dipasang atau ditempel.
3. Penyeimbangan Bidang Bidang Tunggal (Balanset-1A)
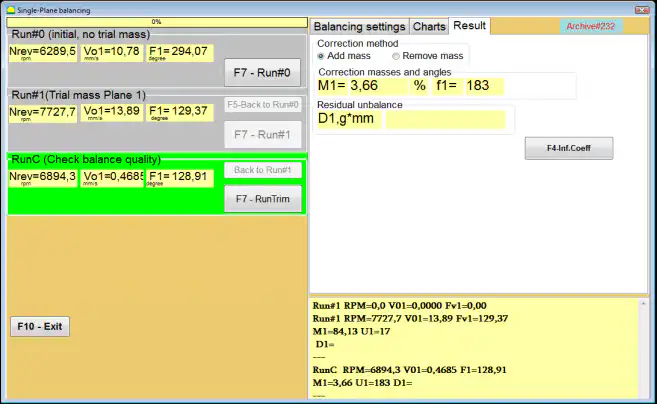
Penyeimbangan statis (satu bidang) juga dapat dilakukan pada mesin yang telah dirakit sepenuhnya dengan menggunakan sistem penyeimbangan portabel — inti dari penyeimbangan lapangan. Dengan Balanset-1A, mode “Penyeimbangan dalam satu bidang (‘statis’)” mengukur kecepatan rotor (RPM) dan vektor dari 1 × getaran - nya RMS nilai dan fase. Berdasarkan pengukuran “Run #0” dan “Run #1”, perangkat lunak secara otomatis menghitung massa dan sudut pemasangan dari bobot korektif yang diperlukan untuk mengurangi ketidakseimbangan rotor, dengan menggunakan koefisien-pengaruh metode.
Hasil penyeimbangan disimpan ke dalam arsip, dan setelah selesai, sebuah laporan neraca dapat dibuat, diedit, dan dicetak menggunakan editor laporan bawaan.
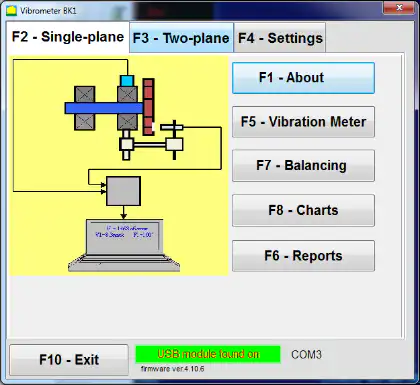
Bagaimana penyeimbangan bidang tunggal dilakukan dalam program Balanset-1A
- Pasang sensor dan sambungkan sistem. Pasang sensor getaran pada titik pengukuran yang telah dipilih, lalu hubungkan ke perangkat. Pasang sensor fase (takometer), terapkan pita reflektif pada rotor, lalu hubungkan perangkat tersebut ke laptop Windows.
- Mulai mode Penyeimbangan Bidang Tunggal. Di jendela utama, pilih mode “Single-plane” dan mulai proses penyeimbangan. Program akan membuka jendela arsip penyeimbangan single-plane.
- Membuat catatan arsip. Masukkan nama rotor, lokasi pemasangan, toleransi (getaran dan ketidakseimbangan sisa), serta tanggalnya. Perangkat lunak ini akan membuat folder arsip tempat grafik dan berkas laporan akan disimpan.
- Atur parameter penyeimbangan di “Pengaturan penyeimbangan”.
- Koefisien pengaruh: Pilih “Rotor Baru” (dua kali pengujian untuk kalibrasi) atau “Koefisien yang Disimpan” (satu kali pengujian, untuk jenis mesin yang sama dengan koefisien pengaruh yang telah disimpan).
- Massa berat percobaan: Pilih “Gramm” atau “Persen”. Jika Anda berencana menggunakan mode “Koefisien yang disimpan” nanti, masukkan berat uji coba massa dalam gram (timbanglah di timbangan).
- Metode Pemasangan Berat: Pilih “Circum” (sudut mana pun pada lingkaran) atau “Posisi Tetap” (lubang/bilah/posisi tetap; masukkan jumlah posisi).
- Radius pemasangan massal: masukkan radius yang digunakan untuk memasang bobot percobaan dan koreksi.
- Biarkan bobot percobaan di Plane1: aktifkan ini hanya jika Anda tidak dapat menghapus beban percobaan selama proses berlangsung.
- Jalankan #0 (lari awal, tanpa beban percobaan). Atur kecepatan mesin hingga stabil, lalu jalankan “Run #0” untuk mengukur getaran awal. Perangkat lunak ini mencatat RPM, nilai RMS, dan fase dari komponen getaran 1×. Tab “Charts” menampilkan bentuk gelombang dan spektrumnya.
- Pasang anak timbangan percobaan. Matikan mesin dan pasang beban uji pada radius yang diketahui. Beban uji harus mengubah amplitudo atau fase getaran secara signifikan. Salah satu kriteria umum adalah “aturan 30/30”: beban uji harus mengubah amplitudo sekitar 30% (lebih rendah atau lebih tinggi) atau fase sekitar 30° atau lebih. Jika Anda berencana menggunakan mode “Saved coeff.” nanti, pasang beban uji pada sudut yang sama dengan tanda pantul.
- Jalankan #1 (beban percobaan terpasang). Nyalakan kembali mesin, tunggu hingga kecepatannya stabil, lalu jalankan “Run #1”. Perangkat lunak akan menghitung parameter bobot korektif.
- Pasang pemberat koreksi. Matikan mesin, lepaskan beban uji, dan pasang koreksi berat. Sudut pemasangan dihitung dari posisi pemberat uji ke arah putaran rotor. Pasang pemberat koreksi pada radius yang sama dengan pemberat uji.
- RunTrim (periksa kualitas saldo). Jalankan perintah “RunTrim” untuk memeriksa hasilnya. Jika masih terdapat getaran sisa dan/atau ketidakseimbangan sisa Jika memenuhi batas toleransi, proses penyeimbangan dapat diselesaikan. Jika tidak, perangkat lunak akan menghitung beban korektif tambahan dan proses penyeimbangan dilanjutkan dengan metode iterasi bertahap.
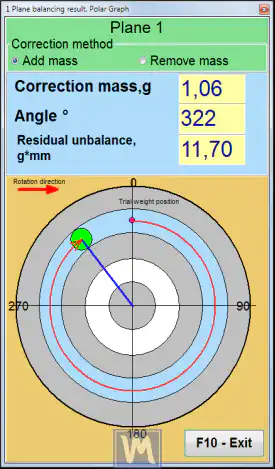
Visualisasi hasil: grafik polar dan posisi tetap
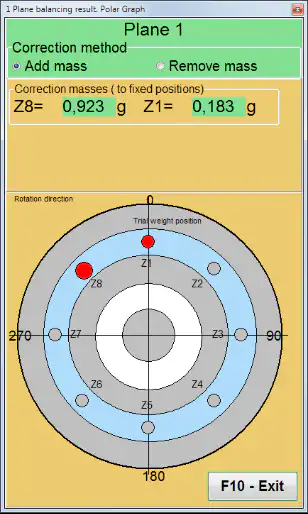
Balanset-1A dapat menampilkan massa dan sudut beban koreksi dalam tampilan koordinat kutub. Jika opsi “Posisi Tetap” dipilih, program dapat secara otomatis membagi beban korektif menjadi dua bagian dan menampilkan nomor posisi tempat masing-masing bagian harus dipasang — sebuah kemudahan yang juga terdapat pada kalkulator koreksi bilah untuk kipas dan impeler dengan titik pemasangan tetap.
4. Memverifikasi Hasil Terhadap Batas Toleransi
Penyeimbangan statis baru dianggap “selesai” jika getaran sisa dan ketidakseimbangan sisa berada dalam batas toleransi yang telah disepakati, dan di sinilah langkah RunTrim menunjukkan kegunaannya. Nilai ketidakseimbangan sisa yang diperbolehkan biasanya ditentukan berdasarkan tingkat kualitas penyeimbangan Kelas G di bawah era modern ISO 21940-11 standar (yang menggantikan ISO 1940-1 yang lebih lama). Mengonversi kelas G dan kecepatan layanan menjadi nilai gram-milimeter yang diizinkan — serta memilih bobot uji awal yang wajar — dapat dilakukan dengan cepat menggunakan kalkulator ketidakseimbangan sisa (ISO 21940-11) dan sebuah kalkulator berat uji. Dengan mencatat ketidakseimbangan sisa pada awal dan akhir proses, kita dapat memperoleh gambaran yang akurat mengenai seberapa efektif pekerjaan tersebut, dan hal ini menjadi inti dari laporan penyeimbangan.
5. Keterbatasan
Keterbatasan utama penyeimbangan statis adalah ketidakmampuannya untuk mendeteksi atau memperbaiki ketidakseimbangan torsi. Menerapkan penyeimbangan statis pada rotor yang sebenarnya memiliki ketidakseimbangan dinamis terkadang dapat memperburuk keadaan — memperbaiki komponen gaya sambil mengabaikan, atau bahkan memperparah, komponen torsi. Karena alasan ini, untuk sebagian besar mesin industri, penyeimbangan dinamis dua bidang merupakan praktik standar dan wajib, sedangkan penyeimbangan statis sebaiknya disimpan untuk rotor berbentuk cakram yang sempit di mana asumsi satu bidangnya benar-benar berlaku.