Statisch balanceren (enkelvlaksbalancering) begrijpen







Statisch balanceren is de eenvoudigste vorm van een rotor balanceren. Het corrigeert statische onbalans — een toestand waarbij een rotor‘s zwaartepunt ligt niet op de rotatieas, waardoor er één “zwaar punt” ontstaat. Omdat dat zware punt alleen onder invloed van de zwaartekracht zichtbaar wordt, kan de correctie in principe worden uitgevoerd terwijl de rotor stilstaat: plaats een rotor met puur statische onbalans op een wrijvingsloos oppervlak, zoals mesranden, en hij blijft rollen totdat het zwaarste punt onderaan komt te liggen. De correctie wordt uitgevoerd in één enkel vlak — één correctiegewicht dat 180° tegenover het zwaarste punt is geplaatst om het zwaartepunt weer op het draaipunt te brengen. Die eenvoud binnen één vlak is de grote kracht van deze methode en, zoals we zullen zien, ook de beperkende factor die haar kenmerkt.
1. Statische onbalans versus dynamische onbalans
Statische onbalans wordt ook wel “krachtonbalans” genoemd, omdat deze een centrifugale kracht die radiaal naar buiten werkt vanuit het draaipunt. Cruciaal is dat er geen “koppel” of schommelende beweging ontstaat. Dat onderscheidt het van dynamische onbalans, dat kracht en koppelonbalans en vereist correcties in ten minste twee vlakken om volledig te worden verholpen. Een rotor kan statisch perfect uitgebalanceerd zijn en toch een aanzienlijke koppelonbalans vertonen waardoor hij hevig gaat trillen zodra hij draait — daarom is statische uitbalancering op zichzelf slechts geschikt voor een bepaalde categorie rotoren.
2. Wanneer is statisch uitbalanceren voldoende?
Statisch uitbalanceren is alleen geschikt voor een specifieke categorie rotoren. Deze methode wordt doorgaans alleen toegepast bij onderdelen die zeer smal of schijfvormig zijn, waarbij de axiale lengte klein is in vergelijking met de diameter. Bij dergelijke rotoren is het onwaarschijnlijk dat er überhaupt sprake is van een aanzienlijke koppelonbalans, zodat een correctie in één vlak het probleem daadwerkelijk oplost.
Veelvoorkomende voorbeelden waarbij statisch balanceren in één vlak vaak voldoende is, zijn onder meer:
- Slijpschijven
- Autowielen en -banden
- Enkele, smalle ventilator- of blaaswielen
- Vliegwielen
- Katrollen en schijven
Bij elke rotor van aanzienlijke lengte — een motoranker, een meertrapspomp of een lange as — volstaat statisch balanceren alleen niet en dynamische balancering in twee vlakken is vereist. De benadering met één vlak wordt verder beschreven onder eenvlaksbalancering.
3. Methoden voor statisch uitbalanceren
1. Balanceren op mesranden
Dit is de klassieke, niet-roterende methode. De rotor wordt op een paar parallelle, waterpas geplaatste mesranden met lage wrijving gelegd. Hij rolt totdat het zwaarste punt zich onderaan bevindt; vervolgens wordt er tijdelijk een gewicht aan de bovenkant (180° tegenovergesteld) toegevoegd totdat de rotor in elke willekeurige positie blijft liggen zonder weg te rollen. Dat gewicht wordt dan permanent aangebracht. Er is geen stroom of elektronica voor nodig — alleen geduld en een paar echte, waterpas geplaatste randen — en het blijft een perfect bruikbare veldtest voor een smalle schijf.
2. Verticale balanceermachine
Het moderne statisch balanceren gebeurt vaak op een verticale balanceermachine. De rotor — bijvoorbeeld een vliegwiel of een band — rust op een horizontale plaat die wordt ondersteund door krachtsensoren. De machine laat deze met lage snelheid draaien, en de sensoren meten de grootte en richting van de onbalanskracht, waarna de benodigde correctie op een scherm wordt weergegeven. Specifiek voor wielen en banden geldt dat een calculator voor wielbalansgewichten zet die meetwaarde om in maten voor opklikbare of zelfklevende gewichten.
3. Enkelvlaks veldbalancering (Balanset-1A)
Statisch (in één vlak) balanceren kan ook worden uitgevoerd op een volledig gemonteerde machine met behulp van een draagbaar balanceersysteem — de kern van veldbalancering. Met de Balanset-1A, meet de modus „Balanceren in één vlak (‘statisch’)” de rotorsnelheid (RPM) en de vector van de 1× trilling — zijn RMS waarde en fase. Op basis van de metingen van „Run #0“ en „Run #1“ berekent de software automatisch de massa en installatiehoek van het correctiegewicht dat nodig is om de onbalans van de rotor te verminderen, met behulp van de invloedscoëfficiënt methode.
De balanceerresultaten worden opgeslagen in een archief en na voltooiing wordt een balanceerrapport kan worden aangemaakt, bewerkt en afgedrukt in de ingebouwde rapporteditor.
Hoe balanceren in één vlak wordt uitgevoerd in het Balanset-1A programma
- Sensoren installeren en het systeem aansluiten. Installeer de trillingssensor op het gekozen meetpunt en sluit deze aan op het apparaat. Installeer de fasesensor (toerenteller), breng reflecterende tape op de rotor en sluit het apparaat aan op een Windows-laptop.
- Start de modus Enkelvlaks balanceren. Selecteer in het hoofdvenster de modus „Single-plane“ en start het balanceren. Het programma opent het archiefvenster voor balanceren in één vlak.
- Een archiefrecord maken. Voer de naam van de rotor, de installatielocatie, de toleranties (trillingen en resterende onbalans) en de datum in. De software maakt een archiefmap aan waarin grafieken en rapportbestanden worden opgeslagen.
- Stel de balanceringsparameters in onder „Balanceringsinstellingen“.
- Invloedscoëfficiënt: Kies ‘Nieuwe rotor’ (twee metingen om te kalibreren) of ‘Opgeslagen coëfficiënten’ (één meting, voor hetzelfde type machine met opgeslagen invloedscoëfficiënten).
- Proefgewicht massa: Kies 'Gramm' of 'Percent'. Voer, als u van plan bent later de modus 'Opgeslagen coëfficiënten' te gebruiken, de proefgewicht massa in gram (weeg het op de weegschaal).
- Gewichtbevestigingsmethode: Kies „Circum“ (een willekeurige hoek op de omtrek) of „Vaste positie“ (vaste gaten/bladen/posities; voer het aantal posities in).
- Radius voor massamontage: voer de straal in die wordt gebruikt voor het monteren van de proef- en correctiegewichten.
- Laat het testgewicht in Vlak 1: Schakel dit alleen in als u het proefgewicht niet kunt verwijderen tijdens het proces.
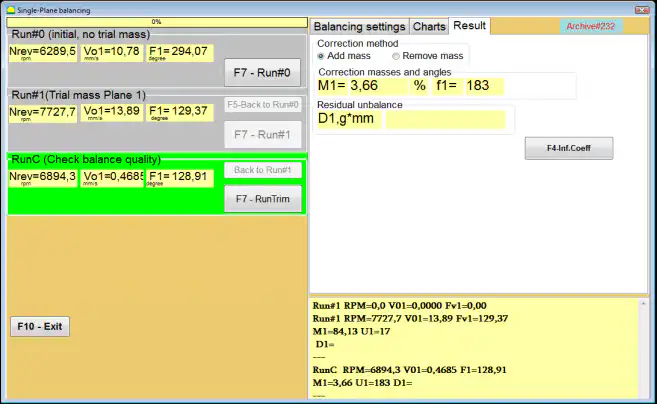
- Meting #0 (eerste meting, geen testgewicht). Breng de machine op een stabiel toerental en start „Run #0“ om de initiële trillingen te meten. De software registreert het toerental, de RMS-waarde en de fase van de 1×-trillingscomponent. Op het tabblad „Grafieken“ worden de golfvorm en het spectrum weergegeven.
- Installeer het proefgewicht. Zet de machine stil en plaats het testgewicht op een bekende straal. Het testgewicht moet de trillingsamplitude of -fase aanzienlijk beïnvloeden. Een veelgebruikt criterium is de „30/30-regel”: het testgewicht moet de amplitude met ongeveer 30% (lager of hoger) of de fase met ongeveer 30° of meer veranderen. Als u van plan bent later de modus „Opgeslagen coëfficiënten” te gebruiken, plaats het testgewicht dan onder dezelfde hoek als de reflecterende markering.
- Meting #1 (proefgewicht geïnstalleerd). Start de machine opnieuw op, wacht tot het toerental stabiel is en voer „Run #1“ uit. De software berekent de parameters voor het correctiegewicht.
- Installeer het correctiegewicht. Zet de machine stil, verwijder het testgewicht en plaats de correctiegewicht. De montagehoek wordt gemeten vanaf de positie van het testgewicht in de draairichting van de rotor. Monteer het correctiegewicht op dezelfde straal als het testgewicht.
- RunTrim (controleer de balanskwaliteit). Voer „RunTrim“ uit om het resultaat te controleren. Als de resttrilling en/of resterende onbalans aan de tolerantie voldoen, kan het balanceren worden voltooid. Zo niet, dan berekent de software een extra correctiegewicht en wordt het balanceren voortgezet door middel van opeenvolgende benaderingen.
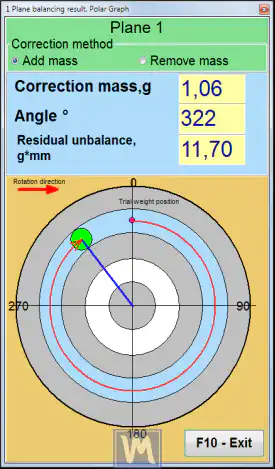
Weergave van resultaten: polaire grafiek en vaste posities
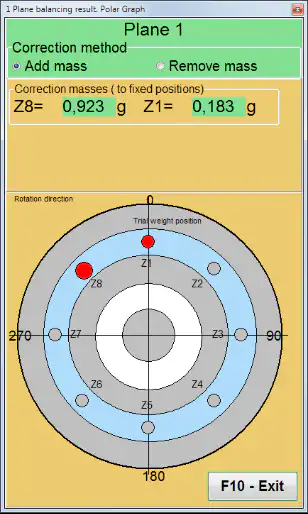
De Balanset-1A kan de massa en de hoek van het correctiegewicht weergeven in een polaire coördinatenweergave. Als „Vaste positie“ is geselecteerd, kan het programma het correctiegewicht automatisch in twee delen splitsen en de posities weergeven waar elk deel moet worden geïnstalleerd — een handige functie die ook terug te vinden is in de calculator voor mescorrectie voor ventilatoren en waaiers met vaste bevestigingspunten.
4. Het resultaat toetsen aan de tolerantie
Een statische balancering is pas „voltooid“ wanneer de resttrilling en de resterende onbalans binnen een overeengekomen tolerantie vallen, en dat is precies waar de RunTrim-stap zijn nut bewijst. De toegestane resterende onbalans wordt doorgaans afgeleid uit een balanceringskwaliteit G-klasse in de moderne ISO 21940-11 norm (waarin de oudere ISO 1940-1 is opgenomen). Het omrekenen van een G-klasse en een werksnelheid naar een toegestane gram-millimeterwaarde — en het kiezen van een redelijk eerste testgewicht — gaat snel met een calculator voor restonbalans (ISO 21940-11) en een calculator voor proefgewicht. Door zowel de aanvankelijke als de uiteindelijke resterende onbalans vast te leggen, krijgt men een eerlijk beeld van hoe effectief de werkzaamheden zijn geweest; dit vormt de kern van het balanceerrapport.
5. Beperkingen
De belangrijkste beperking van statisch balanceren is dat het geen koppelonbalans kan detecteren of corrigeren. Het toepassen van statisch balanceren op een rotor die in werkelijkheid een dynamische onbalans vertoont, kan de situatie soms verergeren — waarbij de krachtcomponent wordt gecorrigeerd terwijl de koppelcomponent wordt genegeerd of zelfs verergerd. Om deze reden is tweevlakig dynamisch balanceren voor de meeste industriële machines de standaard en vereiste praktijk, en kan statisch balanceren het beste worden voorbehouden aan smalle, schijfvormige rotoren waar de aanname van één vlak daadwerkelijk opgaat.