Понимание статической балансировки (одноплоскостная балансировка)







Статическая балансировка это простейшая форма ротора балансировка. Он корректирует статический дисбаланс — состояние, при котором ротор‘центр масс смещен относительно оси вращения, что создает единое “тяжелое пятно”. Поскольку это тяжелое пятно проявляется только под действием силы тяжести, коррекцию, в принципе, можно проводить, когда ротор находится в состоянии покоя: поместите ротор с чисто статическим дисбаланс на поверхности без трения, например, на кромке ножа, и он будет катиться, пока тяжелое пятно не осядет на дно. Фиксация производится в одной плоскости — один корректирующий груз, размещенный на 180° напротив тяжелой точки, чтобы вернуть центр масс в центр вращения. Эта одноплоскостная простота является сильной стороной метода и, как мы увидим, также его определяющим ограничением.
1. Статический дисбаланс в сравнении с динамическим дисбалансом
Статический дисбаланс также называют “силовым дисбалансом”, поскольку он создает центробежная сила действующий радиально наружу от центра вращения. Очень важно, что при этом не возникает “пара” или качательное движение. Это отличает его от динамический дисбаланс, который сочетает в себе силу и моментный дисбаланс и требует коррекции как минимум в двух плоскостях для полного устранения. Ротор может быть идеально статически сбалансирован, но при этом иметь значительный дисбаланс пары, который заставляет его сильно вибрировать при вращении - вот почему статическая балансировка сама по себе подходит только для определенного класса роторов.
2. Когда достаточно статической балансировки?
Статическая балансировка подходит только для определенного класса роторов. Как правило, она применяется для очень узких или дискообразных компонентов, где осевая длина мала по сравнению с диаметром. Для таких роторов значительный дисбаланс пары вряд ли существует изначально, поэтому коррекция в одной плоскости действительно решает проблему.
Распространённые примеры, где однoплоскостной статической балансировки обычно достаточно:
- Шлифовальные круги
- Автомобильные колеса и шины
- Одиночные узкие рабочие колеса вентиляторов или нагнетателей
- Маховики
- Шкивы и блоки
Для любого ротора значительной длины - якоря двигателя, многоступенчатого насоса или длинного вала - одной статической балансировки недостаточно. динамическая балансировка в две плоскости требуется. Сам одноплоскостной подход описан далее в разделе одноплоскостная балансировка.
3. Методы статической балансировки
1. Балансировка на ножевых опорах
Это классический, невращающийся метод. Ротор помещается на пару параллельных, ровных, с низким коэффициентом трения ножевых кромок. Он катится до тех пор, пока его самая тяжелая точка не окажется внизу; затем сверху добавляется временный груз (на 180° противоположный), пока ротор не будет покоиться в любом положении без качения. Затем этот груз становится постоянным. Для этого не нужно ни электричества, ни электроники - только терпение и верная, ровная пара кромок - и это остается вполне приемлемой проверкой узкого диска в полевых условиях.
2. Вертикальный балансировочный станок
Современные статические балансировки часто выполняются на вертикальном балансировочный станок. Ротор - скажем, маховик или шина - располагается на горизонтальной пластине, поддерживаемой датчиками силы. Машина вращает его на низкой скорости, а датчики измеряют величину и направление силы дисбаланса, выводя на экран необходимую коррекцию. Для колес и шин, в частности, используется Калькулятор балансировки колес превращает эти показания в размеры прижимных или клейких гирь.
3. Одноплоскостная балансировка на месте (Balanset-1A)
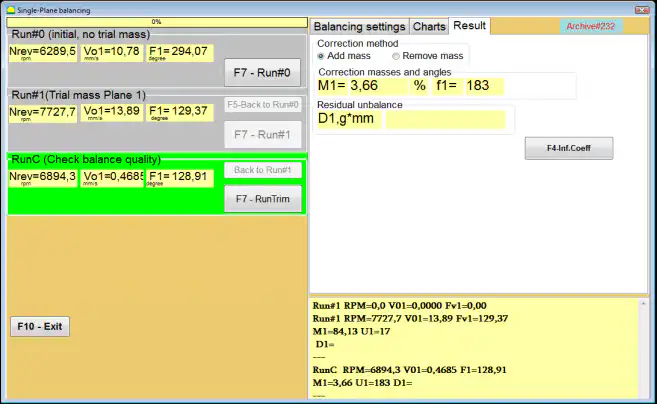
Статическая (одноплоскостная) балансировка также может быть выполнена на полностью собранном станке с помощью портативной балансировочной системы - суть балансировка на месте. С Balanset-1A, В режиме “Балансировка в одной плоскости (‘статическая’)” измеряется скорость вращения ротора (RPM) и вектор 1× вибрация - свой СКЗ значение и фаза. По результатам измерений “Пробег #0” и “Пробег #1” программа автоматически рассчитывает масса и угол установки корректирующего веса, необходимого для уменьшения дисбаланса ротора, используя коэффициент влияния метод.
Результаты балансировки сохраняются в архиве, а по завершении создается балансовый отчет можно создавать, редактировать и распечатывать во встроенном редакторе отчетов.
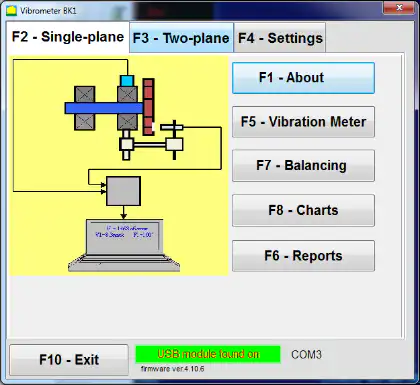
Как выполняется одноплоскостная балансировка в программе Balanset-1A
- Установите датчики и подключите систему. Установите датчик вибрации в выбранной точке измерения и подключите его к прибору. Установите датчик фазы (тахометр), применить светоотражающая лента на роторе и подключите устройство к ноутбуку с ОС Windows.
- Запустить режим одноплоскостной балансировки. В главном рабочем окне выберите режим “Одноплоскостной” и начните балансировку. Программа откроет окно архива балансировки в одной плоскости.
- Создать архивную запись. Укажите название ротора, место установки, допуски (по вибрации и остаточному дисбалансу) и дату. Программа создаст папку для архива, в которой будут сохранены графики и файлы отчетов.
- Установите параметры балансировки в разделе “Настройки балансировки”.
- Коэффициент влияния: выберите “Новый ротор” (два прогона для калибровки) или “Сохраненный коэф.” (один прогон, для одного типа машины с сохраненными коэффициентами влияния).
- Масса пробного груза: выберите “Грамм” или “Процент”. Если вы планируете использовать режим “Сохраненный коэф.” позже, введите пробный груз масса в граммах (взвесьте на весах).
- Способ крепления груза: выберите “Circum” (любой угол по окружности) или “Fixed position” (фиксированные отверстия/лезвия/позиции; введите количество позиций).
- Радиус крепления груза: Введите радиус, используемый для установки пробных и корректирующих грузов.
- Оставить пробный груз в плоскости 1: Включайте эту опцию только в том случае, если вы не можете снять пробный груз в ходе процесса.
- Запуск № 0 (первоначальный запуск, без пробного груза). Выведите машину на стабильную скорость и запустите “Run #0” для измерения начальной вибрации. Программное обеспечение регистрирует число оборотов, среднеквадратичное значение и фазу компонента вибрации 1×. На вкладке “Графики” отображаются форма волны и спектр.
- Установите пробный груз. Остановите машину и установите пробный груз на известном радиусе. Пробный груз должен значительно изменить амплитуду или фазу вибрации. Общепринятым критерием является “правило 30/30”: пробный груз должен изменить амплитуду примерно на 30% (ниже или выше) или фазу примерно на 30° или более. Если вы планируете в дальнейшем использовать режим “Сохраненный коэффициент”, установите пробный груз под тем же углом, что и отражающая метка.
- Заезд № 1 (с установленным пробным грузом). Перезапустите машину, дождитесь стабильной скорости и выполните “Run #1”. Программное обеспечение рассчитывает параметры корректирующего веса.
- Установите корректирующий груз. Остановите машину, снимите пробный груз и установите его. корректирующий груз. Угол установки отсчитывается от положения пробного груза в направлении вращения ротора. Установите корректирующий груз по тому же радиусу, что и пробный груз.
- RunTrim (проверка качества баланса). Выполните “RunTrim”, чтобы проверить результат. Если остаточная вибрация и/или остаточный дисбаланс соответствует допуску, балансировка может быть завершена. Если нет, программа рассчитывает дополнительный корректирующий вес и балансировка продолжается путем последовательных приближений.
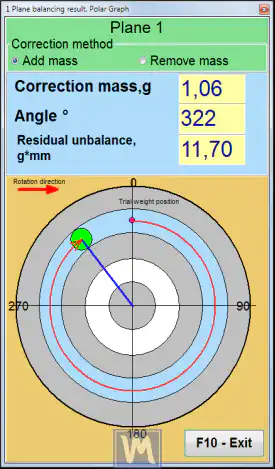
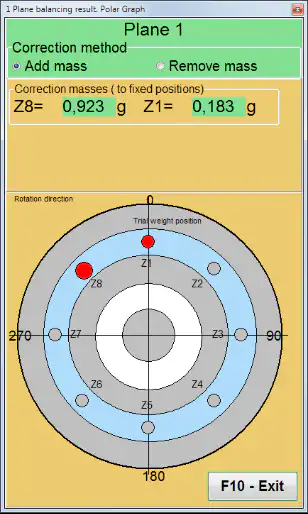
Визуализация результатов: полярный график и фиксированные позиции
Balanset-1A может отображать массу и угол наклона корректирующего груза в вид в полярных координатах. Если выбрана опция “Фиксированная позиция”, программа может автоматически разделить корректирующий груз на две части и показать номера позиций, где каждая часть должна быть установлена - удобство, зеркально отраженное в калькулятор коррекции лопастей для вентиляторов и крыльчаток с фиксированными точками крепления.
4. Проверка результата на соответствие допускам
Статическая балансировка считается завершенной только тогда, когда остаточная вибрация и остаточный дисбаланс находятся в пределах согласованного допуска, и именно здесь окупается этап RunTrim. Допустимый остаточный дисбаланс обычно берется из баланса качества G-класс в условиях современного ISO 21940-11 стандарта (который вобрал в себя более старый стандарт ISO 1940-1). Преобразование класса G и рабочей скорости в допустимый показатель в граммах и миллиметрах, а также выбор разумного веса для первого испытания осуществляется быстро с помощью программы калькулятор остаточного дисбаланса (ISO 21940-11) и калькулятор пробного веса. Запись как начального, так и конечного остаточного дисбаланса дает честную оценку эффективности работы и составляет основу отчета о балансировке.
5. Ограничения
Основным ограничением статической балансировки является ее неспособность обнаружить или исправить дисбаланс пары. Применение статической балансировки к ротору, который на самом деле имеет динамический дисбаланс, может иногда ухудшить ситуацию - исправить компонент силы, игнорируя или даже усугубляя компонент пары. По этой причине для большинства промышленных машин стандартной и необходимой практикой является двухплоскостная динамическая балансировка, а статическая балансировка лучше всего подходит для узких дискообразных роторов, где действительно имеет место одноплоскостное допущение.