静的バランス調整(単面バランス調整)の理解







静的バランス ローターの最も単純な形態である バランシング. It corrects 静的アンバランス — ある状態において、 ローターの重心は回転軸からずれており、それによって単一の「重心の偏り」が生じている。この重心の偏りは重力のみによって現れるため、原理的にはローターを静止させた状態で補正を行うことができる。すなわち、純粋な静的 アンバランス ナイフの刃先のような摩擦のない表面では、重い部分が底に落ち着くまで転がり続けます。修正は 単面 — 重心の位置を回転中心に戻すため、重心の位置と180°反対側に1つの補正重りを配置する。この単一平面での単純さが、この手法の最大の強みであると同時に、後で見るように、その決定的な限界でもある。
1. 静的不平衡と動的不平衡
静的不平衡は、「力的不平衡」とも呼ばれます。これは、 遠心力 回転中心から半径方向に外側へ向かって作用する。重要な点は、これによって「トルク」や揺れ運動が生じないことである。この点が、 動的アンバランス、力と カップルアンバランス そして、これを完全に解消するには、少なくとも2つの面での補正が必要となります。ローターは静的バランスが完璧であっても、回転すると激しい振動を引き起こすほどの大きなモーメント不平衡を抱えていることがあります。そのため、静的バランス調整だけでは、特定の種類のローターにしか適さないのです。
2. 静的バランス調整で十分な場合はいつですか?
静的バランス調整は、特定の種類のローターにのみ適しています。一般的には、直径に比べて軸方向の長さが短い、非常に細長い形状や円盤状の部品に限定して行われます。このようなローターの場合、そもそも大きなモーメント不平衡が生じる可能性が低いため、単一平面での補正だけで問題を完全に解決することができます。
単一平面の静的バランス調整で十分な一般的な例としては、次のようなものがあります:
- 研削ホイール
- 自動車用ホイールおよびタイヤ
- 単一の狭いファンまたは送風機
- フライホイール
- 滑車とシーブ
十分な長さを持つローター(モーターのアーマチュア、多段ポンプ、あるいは長いシャフトなど)の場合、静的バランス調整だけでは不十分であり、 ダイナミックバランシング で 2つの平面 が必要です。シングルプレーン・アプローチそのものについては、以下のセクションでさらに詳しく説明しています。 単面バランス.
3. 静的バランス調整の方法
1. ナイフエッジバランス
これは、回転させない古典的な方法です。ローターを、平行で水平、かつ摩擦の少ない2本のナイフエッジの上に置きます。ローターは、最も重い部分が下になるまで転がります。その後、ローターが転がらずに静止する位置になるまで、上部(180°反対側)に一時的な重りを追加します。そして、その重りを恒久的なものにします。 動力も電子機器も不要で、必要なのは忍耐と正確に水平に保たれた一対のエッジだけです。これは、薄型のディスクに対する実地検査として、今なお完全に有効な方法です。
2. 垂直バランスマシン
現代の静的バランス調整は、多くの場合、垂直な状態で実施される バランスマシン. ローター(フライホイールやタイヤなど)は、力センサーで支えられた水平なプレートの上に設置されます。装置がこれを低速で回転させると、センサーが不均衡力の大きさと方向を測定し、必要な補正値を画面に表示します。特に車輪やタイヤの場合、 ホイールバランス用ウェイト計算機 その測定値を、クリップ式または粘着式のオモリのサイズに変換します。
3.シングル・プレーン・フィールド・バランシング(バランセット-1A)
静的(単面)バランス調整は、ポータブルバランスシステムを使用すれば、完全に組み立てられた機械に対しても行うことができます。これが フィールドバランシング. With the バランセット-1A、「単一平面でのバランス(『静的』)」モードでは、ローターの回転数(RPM)とベクトルを測定します。 1× vibration — its RMS value and 位相「Run #0」および「Run #1」の測定値から、ソフトウェアは自動的に 質量 そして 取り付け角度 ローターの不均衡を低減するために必要な補正重量を、以下の式を用いて算出する 影響係数 method.
バランス計算の結果はアーカイブに保存され、完了すると バランス調整レポート 組み込みのレポートエディタで作成、編集、印刷が可能です。
Balanset-1Aプログラムにおけるシングルプレーン・バランシングの方法
- センサーを設置し、システムを接続する。. 振動センサーを選定した測定ポイントに取り付け、本装置に接続してください。位相センサーを取り付け(タコメーター), apply 反射テープ ローターに取り付け、そのデバイスをWindows搭載のノートパソコンに接続します。
- シングル・プレーン・バランシング・モードを開始する。. メイン操作ウィンドウで「シングルプレーン」モードを選択し、バランス調整を開始します。プログラムがシングルプレーンバランス調整アーカイブウィンドウを開きます。
- アーカイブレコードを作成する。. ローター名、設置場所、許容値(振動および残留不均衡)、および日付を入力してください。ソフトウェアは、グラフやレポートファイルを保存するためのアーカイブフォルダを作成します。
- 「バランス調整設定」でバランス調整パラメータを設定します。
- 影響係数: 「New Rotor」(キャリブレーションに2回の運転が必要)または「Saved coeff.」(保存済みの影響係数がある同型機の場合、1回の運転で済む)を選択してください。
- 試用重量の質量: 「Gramm」または「Percent」を選択してください。後で「Saved coeff.」モードを使用する予定がある場合は、 試用重量 質量(グラム単位)(はかりで計ってください)。
- ウェイト・アタッチメント方式: 「円周上」(円周上の任意の角度)または「固定位置」(穴・ブレード・位置が固定されている場合。位置の数を入力してください)を選択してください。
- マスマウント半径: 試用分銅と補正分銅の取り付けに使用する半径を入力します。.
- Plane1にトライアルウェイトを残す: トライアルウェイトを途中で削除できない場合のみ有効にしてください。.
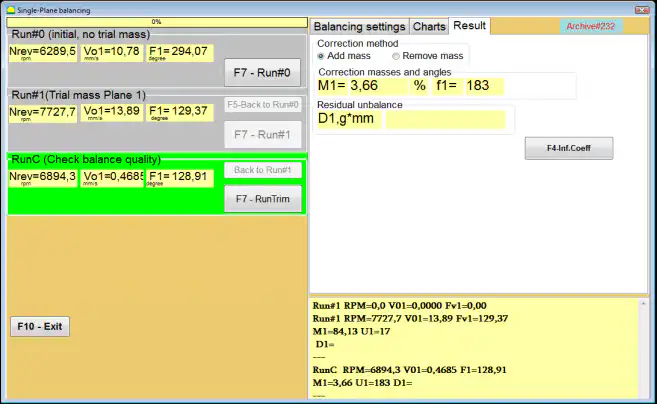
- #0 を実行する(初回実行、トライアルウェイトなし)。. 機械を安定した回転数に保ち、「Run #0」を実行して初期の振動を測定します。ソフトウェアは、1×振動成分の回転数(RPM)、RMS値、および位相を記録します。「Charts」タブには、波形とスペクトルが表示されます。
- トライアルウェイトを取り付ける。. 機械を停止し、既知の半径位置に試験用おもりを設置してください。試験用おもりは、振動の振幅または位相に著しい変化をもたらす必要があります。一般的な基準として「30/30ルール」があります。すなわち、試験用おもりは振幅を約30%(増減)変化させるか、位相を約30度以上変化させる必要があります。後で「保存済み係数」モードを使用する予定がある場合は、反射マークと同じ角度に試験用おもりを設置してください。
- #1(トライアルウェイトをインストール)を実行します。. 機械を再起動し、回転数が安定するのを待ってから、「Run #1」を実行してください。ソフトウェアが補正用ウェイトのパラメータを算出します。
- 補正ウェイトを取り付けます。. 機械を停止し、試験用おもりを外して、 修正重量. 取り付け角度は、試験用ウェイトの位置からローターの回転方向に向かって測定します。補正用ウェイトは、試験用ウェイトと同じ半径に取り付けてください。
- RunTrim(バランスの質をチェックする)。. 「RunTrim」を実行して結果を確認してください。残留振動や 残留アンバランス 公差を満たしていれば、バランス調整は完了します。満たしていない場合、ソフトウェアは追加の補正用おもりを算出し、反復近似法によってバランス調整を継続します。
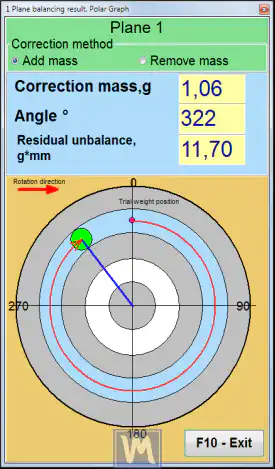
結果の可視化:極座標グラフと固定位置
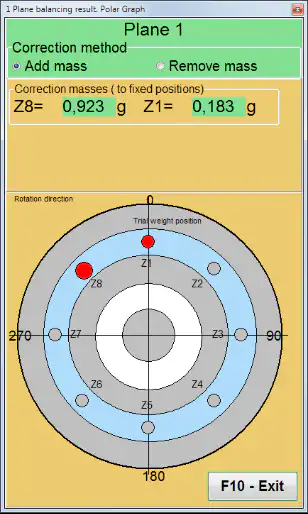
Balanset-1Aは、補正用おもりの質量と角度を 極座標表示。「固定位置」を選択すると、プログラムは補正用ウェイトを自動的に2つに分割し、それぞれを取り付けるべき位置番号を表示します。この利便性は、 ブレード補正計算機 固定取付点を備えたファンおよびインペラー用。
4. 許容値との照合
静的バランス調整は、残留振動と残留アンバランスが所定の許容範囲内に収まって初めて「完了」となります。ここでこそ、RunTrim工程の真価が発揮されるのです。許容される残留アンバランスの値は、通常、バランス品質基準に基づいて定められます。 G級 現代において ISO 21940-11 規格(旧ISO 1940-1を統合したもの)。G等級とサービス速度を許容グラム・ミリメートル値に変換し、適切な初期試験重量を選択する作業は、 残留不平衡計算機(ISO 21940-11) そして トライアルウェイト計算機. 作業開始時と終了時の残留不均衡の両方を記録することで、作業の有効性を正確に評価することができ、これがバランス調整報告書の核心となります。
5.制限事項
静的バランス調整の主な限界は、モーメント不平衡を検出・補正できない点にあります。実際に動的不平衡があるローターに静的バランス調整を施すと、事態を悪化させることがあります。つまり、力の成分を補正する一方で、モーメントの成分を無視したり、さらには悪化させたりしてしまうことがあります。このため、ほとんどの産業機械では、2面動的バランス調整が標準かつ必須の慣行となっており、静的バランス調整は、その単一平面の仮定が真に成り立つ、幅の狭い円盤状のローターに限定して行うのが最善です。