ทำความเข้าใจเกี่ยวกับการปรับสมดุลแบบคงที่ (การปรับสมดุลแบบระนาบเดียว)







การปรับสมดุลแบบคงที่ เป็นรูปแบบโรเตอร์ที่ง่ายที่สุด การถ่วงสมดุล. แก้ไข ความไม่สมดุลแบบคงที่ — สภาวะที่ โรเตอร์ศูนย์กลางมวลอยู่นอกแกนการหมุน ก่อให้เกิด “จุดหนัก” ตัวเดียว เนื่องจากจุดหนักนั้นปรากฏให้เห็นภายใต้แรงโน้มถ่วงเพียงอย่างเดียว การแก้ไขจึงสามารถดำเนินการได้ในหลักการ โดยโรเตอร์อยู่นิ่ง: วางโรเตอร์ที่มีความไม่สมดุลแบบสถิตบริสุทธิ์ ความไม่สมดุล บนพื้นผิวที่ไม่มีแรงเสียดทาน เช่น มีดขัด และมันจะกลิ้งจนกว่าตำแหน่งที่หนักจะเคลื่อนตัวไปที่ด้านล่าง การแก้ไขจะทำในระนาบ ระนาบเดียว — น้ำหนักแก้ไขหนึ่งตัววางตรงข้ามมี 180° กับจุดที่หนักเพื่อนำจุดศูนย์กลางมวลกลับไปที่จุดศูนย์กลางการหมุน ความเรียบง่ายของระนาบเดียวนี้เป็นจุดแข็งอันยิ่งใหญ่ของวิธีการ และตามที่เราจะเห็น มันเป็นข้อจำกัดที่กำหนดลักษณะของมันด้วย
1. ความไม่สมดุลแบบสถิตย์ เทียบกับ ความไม่สมดุลแบบไดนามิก
ความไม่สมดุลแบบสถิตย์เรียกอีกชื่อหนึ่งว่า “ความไม่สมดุลของแรง” เพราะะมันเกิด แรงเหวี่ยงหนีศูนย์กลาง กระทำในทิศทางรัศมีออกจากจุดศูนย์กลางการหมุน สิ่งสำคัญคือมันไม่สร้าง “แรงคู่” หรือการแกว่งแบบสะเทิน นั่นคือความแตกต่างจากมัน ความไม่สมดุลแบบไดนามิกซึ่งรวมแรงและ ความไม่สมดุลแบบคู่ และต้องใช้การแก้ไขในระนาบอย่างน้อยสองระนาบเพื่อแก้ปัญหาอย่างสมบูรณ์ โรเตอร์อาจสมดุลแบบสถิตย์ได้อย่างสมบูรณ์แบบและยังคงมีแรงคู่ที่มีนัยสำคัญซึ่งทำให้มันสั่นสะเทือนอย่างรุนแรงเมื่อมันหมุน — นั่นคือเหตุผลที่ความสมดุลแบบสถิตย์ของตัวมันเองเพียงอย่างเดียวเหมาะสำหรับคลาสโรเตอร์บางประเภทเท่านั้น
2. เมื่อใดที่การปรับสมดุลแบบสถิตย์มีความเพียงพอ
การปรับสมดุลแบบสถิตย์เหมาะสมสำหรับชิ้นส่วนที่มีรูปทรงแคบหรือเป็นแบบจานแผ่น ซึ่งความยาวตามแกนนั้นเล็กเมื่อเทียบเส้นผ่านศูนย์กลาง สำหรับโรเตอร์ดังกล่าว ความไม่สมดุลของแรงคู่ที่มีนัยสำคัญแทบจะไม่มีอยู่ตั้งแต่แรก ดังนั้นการแก้ไขระนาบเดียวจึงแก้ปัญหาได้อย่างแท้จริง
ตัวอย่างทั่วไปที่มักจะเพียงพอสำหรับการปรับสมดุลแบบสถิตย์ระนาบเดียวว่า ได้แก่:
- หินเจียร
- ล้อและยางรถยนต์
- ล้อพัดลมหรือโบลเวอร์แบบเดี่ยวแคบ
- มู่เล่
- รอกและลูกรอก
สำหรับโรเตอร์ที่มีความยาวมาก — อาร์เมเจอร์มอเตอร์ ปั๊มหลายขั้น หรือเพลายาว — การปรับสมดุลแบบสถิตย์เพียงอย่างเดียวไม่เพียงพออย่างแนนอน และ การปรับสมดุลแบบไดนามิก ใน สองระนาบ จำเป็น วิธีการระนาบเดียวจึงแก้ปัญหาได้อย่างแท้จริงไหท่ได้รับการอธิบายเพิ่มเติมภายใต้ การปรับสมดุลระนาบเดียว.
3. วิธีการปรับสมดุลแบบสถิตย์
1. การทรงตัวแบบคมมีด
นี่คือวิธีคลาสสิกที่ไม่หมุน โรเตอร์จะวางไว้บนมีดขัดแบบขนานสองตัวที่รับเรียบแล้วมีแรงเสียดทานต่ำ มันจะกลิ้งจนกว่าจุดที่หนักที่สุดจะอยู่ที่ด้านล่าง จากนั้นจึงเพิ่มน้ำหนักชั่วคราวที่ด้านบน (ตรงข้าม 180°) จนกว่าโรเตอร์จะสามารถหยุดไว้ในตำแหน่งใดก็ได้โดยไม่กลิ้ง น้ำหนักดังกล่าวจึงจะถูกทำให้คงตัว มันไม่ต้องการพลังงานและอิเล็กทรอนิกส์ — เพียงแต่ความอดทน และมีดขัดแบบขนานที่รับเรียบแล้วแท้จริง — และยังคงเป็นการตรวจสอบภาคสนามที่ถูกต้องอย่างสมบูรณ์สำหรับแผ่นแคบ
2. เครื่องปรับสมดุลแนวตั้ง
การปรับสมดุลแบบสถิตย์สมัยใหม่มักจะทำกับแบบแนวตั้ง เครื่องถ่วงดุลโรเตอร์ — โคร่งโลหะหรือยาง เช่น — นั่นอยู่บนแผ่นแนวนอนที่รองรับด้วยเซ็นเซอร์แรง เครื่องจักรจะหมุนมันด้วยความเร็วต่ำ และเซ็นเซอร์จะวัดขนาดและทิศทางของแรงไม่สมดุล โดยแสดงการแก้ไขที่จำเป็นบนหน้าจอ สำหรับล้อและยางโดยเฉพาะ เครื่องคำนวณน้ำหนักปรับสมดุลล้อ เปลี่ยนค่าดังกล่าวเป็นขนาดน้ำหนักที่ติดคลิปหรือยึดด้วยกาว
3. การถ่วงสมดุลภาคสนามแบบระนาบเดียว (Balanset-1A)
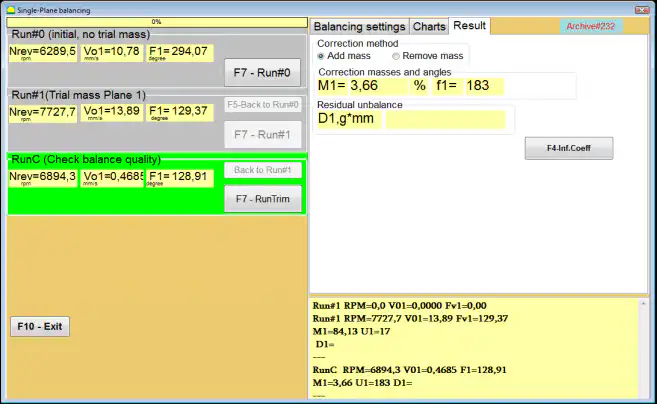
การปรับสมดุลแบบสถิตย์ (ระนาบเดียว) ยังสามารถทำได้บนเครื่องจักรที่ประกอบอย่างสมบูรณ์โดยใช้ระบบปรับสมดุลแบบพกพา — สาระสำคัญของ การถ่วงสมดุลภาคสนาม. ด้วย Balanset-1A, โหมด “การสมดุลในระนาบเดียว (‘static’)” จะวัดความเร็วของโรเตอร์ (RPM) และเวกเตอร์ของ การสั่นสะเทือน 1× — ของมัน อาร์เอ็มเอส ค่า และ เฟส. จากการวัด “Run #0” และ “Run #1” ซอฟต์แวร์จะคำนวณโดยอัตโนมัติ มวล และ มุมติดตั้ง ของน้ำหนักแก้ไขที่จำเป็นเพื่อลดความไม่สมดุลของโรเตอร์ โดยใช้ สัมประสิทธิ์อิทธิพล วิธีการ
ผลการสมดุลจะถูกบันทึกไว้ในไฟล์เก็บถาวร และเมื่อเสร็จสิ้นจะมี รายงานการสมดุล สามารถสร้าง แก้ไข และพิมพ์ได้ในโปรแกรมแก้ไขรายงานในตัว
วิธีการถ่วงสมดุลแบบระนาบเดียวในโปรแกรม Balanset-1A
- ติดตั้งเซ็นเซอร์และเชื่อมต่อระบบ. ติดตั้งเซนเซอร์การสั่นที่จุดวัดที่เลือกและเชื่อมต่อกับอุปกรณ์ ติดตั้งเซนเซอร์เฟส (เครื่องวัดความเร็วรอบ) ให้ใช้ เทปสะท้อนแสง บนโรเตอร์ และเชื่อมต่ออุปกรณ์กับแล็ปท็อป Windows
- เริ่มโหมดการปรับสมดุลแบบระนาบเดียว. ในหน้าต่างการทำงานหลัก เลือกโหมด “Single-plane” และเริ่มการสมดุล โปรแกรมจะเปิดหน้าต่างไฟล์เก็บถาวรการสมดุลระนาบเดียว
- สร้างบันทึกคลังข้อมูล. ป้อนชื่อโรเตอร์ สถานที่ติดตั้ง ค่าความคลาดเคลื่อน (การสั่นสะเทือนและความไม่สมดุลคงเหลือ) และวันที่ ซอฟต์แวร์จะสร้างโฟลเดอร์เก็บถาวรซึ่งจะบันทึกแผนภูมิและไฟล์รายงานไว้.
- ตั้งค่าพารามิเตอร์การสมดุลใน “Balancing settings”
- สัมประสิทธิ์อิทธิพล: เลือก “New Rotor” (สองครั้งเพื่อสอบเทียม) หรือ “Saved coeff.” (หนึ่งครั้ง สำหรับเครื่องจักรประเภทเดียวกันพร้อมสัมประสิทธิ์อิทธิพลที่บันทึกไว้)
- มวลของน้ำหนักทดลอง: เลือก “Gramm” หรือ “Percent” หากคุณวางแผนจะใช้โหมด “Saved coeff.” ต่อไป ให้ป้อน น้ำหนักทดลอง มวลเป็นกรัม (ชั่งด้วยตาชั่ง)
- วิธีการติดตั้งน้ำหนัก: เลือก “Circum” (มุมใดๆ บนเส้นรอบวง) หรือ “Fixed position” (รูป/ใบมีด/ตำแหน่งคงที่; ป้อนจำนวนตำแหน่ง)
- รัศมีติดตั้งน้ำหนัก: ป้อนรัศมีที่ใช้ในการติดตั้งน้ำหนักทดลองและน้ำหนักแก้ไข.
- คงน้ำหนักทดลองไว้ใน Plane1: เปิดใช้งานนี้เฉพาะเมื่อคุณไม่สามารถลบน้ำหนักทดลองออกระหว่างกระบวนการเท่านั้น.
- รัน #0 (รันเริ่มต้น ไม่มีน้ำหนักทดลอง) นำเครื่องไปยังความเร็วที่เสถียรและเริ่ม “Run #0” เพื่อวัดการสั่นเบื้องต้น ซอฟต์แวร์จะบันทึก RPM ค่า RMS และเฟสของส่วนประกอบการสั่น 1× แท็บ “Charts” แสดงรูปคลื่นและสเปกตรัม
- ติดตั้งน้ำหนักทดลอง. หยุดเครื่องและติดตั้งน้ำหนักทดลองที่รัศมีที่ทราบแน่ชัด น้ำหนักทดลองจะต้องเปลี่ยนแอมพลิจูดหรือเฟสของการสั่นอย่างมีนัยสำคัญ เกณฑ์ทั่วไปคือ “กฎ 30/30”: น้ำหนักทดลองควรเปลี่ยนแอมพลิจูดประมาณ 30% (ต่ำกว่าหรือสูงกว่า) หรือเปลี่ยนเฟสประมาณ 30° ขึ้นไป หากคุณวางแผนจะใช้โหมด “Saved coeff.” ต่อไป ให้ติดตั้งน้ำหนักทดลองที่มุมเดียวกับเครื่องหมายสะท้อนแสง
- รัน #1 (น้ำหนักทดลองติดตั้งแล้ว). รีสตาร์ตเครื่องและรอความเร็วที่เสถียรจากนั้นดำเนิน “Run #1” ซอฟต์แวร์จะคำนวณพารามิเตอร์น้ำหนักแก้ไข
- ติดตั้งน้ำหนักแก้ไข หยุดเครื่อง นำน้ำหนักทดลองออก และติดตั้ง น้ำหนักแก้ไข. มุมการติดตั้งจะนับจากตำแหน่งน้ำหนักทดลองในทิศทางการหมุนของโรเตอร์ ติดตั้งน้ำหนักแก้ไขในรัศมีเดียวกับน้ำหนักทดลอง
- RunTrim (ตรวจสอบคุณภาพการถ่วงสมดุล) ดำเนิน “RunTrim” เพื่อตรวจสอบผลลัพธ์ หากการสั่นตกค้างและ/หรือ ความไม่สมดุลที่เหลืออยู่ เข้าเกณฑ์ อาจสามารถเสร็จสิ้นการสมดุลได้ หากไม่เป็นเช่นนั้น ซอฟต์แวร์จะคำนวณน้ำหนักแก้ไขเพิ่มเติม และการสมดุลจะดำเนินต่อไปด้วยการประมาณค่าแบบลำดับ
การแสดงผลลัพธ์: กราฟแบบขั้วและตำแหน่งคงที่
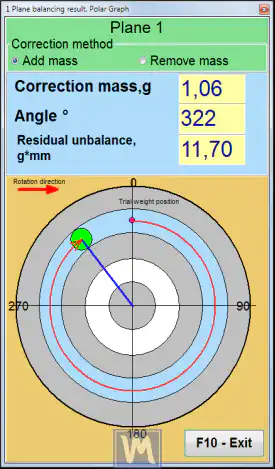
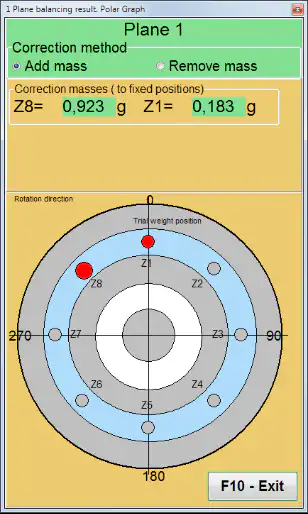
Balanset-1A สามารถแสดงมวลและมุมของน้ำหนักแก้ไขในอุณหภูมิ มุมมองพิกัดเชิงขั้วหากเลือก “ตำแหน่งคงที่” โปรแกรมสามารถแบ่งน้ำหนักแก้ไขออกเป็นสองส่วนโดยอัตโนมัติ และแสดงหมายเลขตำแหน่งที่ต้องติดตั้งแต่ละส่วน ซึ่งเป็นความสะดวกที่สะท้อนโดย เครื่องคำนวณการแก้ไขใบพัด สำหรับพัดลมและใบประแบบด้วยจุดยึดคงที่
4. การตรวจสอบผลลัพธ์เทียบกับเกณฑ์
สมดุลแบบคงที่จะ “เสร็จสิ้น” เมื่อการสั่นของสารตกค้างและความไม่สมดุลของสารตกค้างอยู่ในเกณฑ์ที่ตกลงกัน ซึ่งเป็นที่ที่ขั้นตอน RunTrim มีค่า ความไม่สมดุลของสารตกค้างที่อนุญาตนั้นมักจะได้รับจากคุณภาพการสมดุล เกรด G ภายใต้สมัยใหม่ ISO 21940-11 มาตรฐาน (ซึ่งรับเอา ISO 1940-1 ที่เก่ากว่า) การแปลงเกรด G และความเร็วการให้บริการเป็นรูปแบบแกรม-มิลลิเมตรที่อนุญาต และการเลือกน้ำหนักการทดสอบแรกที่สมเหตุสมผล มีความเร็วด้วย เครื่องคำนวณความไม่สมดุลของสารตกค้าง (ISO 21940-11) และ เครื่องคำนวณน้ำหนักทดลองการบันทึกความไม่สมดุลของสารตกค้างทั้งเริ่มแรกและสุดท้ายให้การวัดที่ซื่อสัตย์ว่างานนั้นมีประสิทธิภาพเพียงใด และสร้างแกนกลางของรายงานการสมดุล
5. ข้อจำกัด
ข้อจำกัดหลักของการสมดุลแบบคงที่คือความไม่สามารถตรวจหรือแก้ไขความไม่สมดุลของคู่ การใช้การสมดุลแบบคงที่กับโรเตอร์ที่มีความไม่สมดุลแบบไดนามิกจริงอาจทำให้สถานการณ์เลวลงในบางครั้ง แก้ไขส่วนประกอบของแรงขณะที่ไม่สนใจหรือแม้กระทั่งทำให้ส่วนประกอบของคู่เลวลง ด้วยเหตุนี้ สำหรับเครื่องจักรอุตสาหกรรมส่วนใหญ่ การสมดุลแบบไดนามิกสองระนาบเป็นหลักการมาตรฐานและจำเป็น และการสมดุลแบบคงที่ดีที่สุดสำหรับโรเตอร์รูปจานแคบที่สมมติฐานระนาบเดียวจริง ๆ