Forstå statisk balansering (enkeltplansbalansering)







Statisk balansering er den enkleste formen for en rotor balansering. Det korrigerer statisk ubalanse — en tilstand der en rotorMassemidtpunktet er forskjøvet i forhold til rotasjonsaksen, noe som skaper et enkelt «tyngdepunkt». Siden dette tyngdepunktet kommer til syne utelukkende under påvirkning av tyngdekraften, kan korreksjonen i prinsippet utføres mens rotoren står stille: plasser en rotor med ren statisk ubalanse på en friksjonsfri overflate, for eksempel en knivkant, og den vil rulle til den tyngste delen legger seg nederst. Løsningen utføres i en enkeltplan — én korrigeringsvekt plassert 180° motsatt tyngdepunktet for å bringe tyngdepunktet tilbake til rotasjonssenteret. Denne enkelheten i ett plan er metodens store styrke og, som vi skal se, også dens avgjørende begrensning.
1. Statisk ubalanse vs. dynamisk ubalanse
Statisk ubalanse kalles også «kraftubalanse», fordi den fører til en sentrifugalkraft som virker radialt utover fra rotasjonssenteret. Det avgjørende er at den ikke skaper noe «moment» eller noen vippebevegelse. Dette skiller den fra dynamisk ubalanse, som kombinerer kraft og momentubalanse og krever korreksjoner i minst to plan for å oppnå fullstendig balanse. En rotor kan være perfekt statisk balansert og likevel ha en betydelig momentubalanse som får den til å vibrere kraftig når den roterer – og det er grunnen til at statisk balansering i seg selv kun er egnet for en bestemt type rotorer.
2. Når er statisk balansering tilstrekkelig?
Statisk balansering er kun egnet for en bestemt type rotorer. Den brukes vanligvis kun på komponenter som er svært smale eller skiveformede, der den aksiale lengden er liten sammenlignet med diameteren. For slike rotorer er det lite sannsynlig at det i utgangspunktet foreligger noen vesentlig ubalansemoment, så en korreksjon i ett plan løser faktisk problemet.
Vanlige eksempler der statisk balansering i ett plan ofte er tilstrekkelig, er blant annet:
- Slipeskiver
- Bilfelger og dekk
- Enkle, smale vifte- eller blåsehjul
- Svinghjul
- Trinser og skiver
For enhver rotor av betydelig lengde – en motoranker, en flertrinnspumpe eller en lang aksel – er statisk balansering alene ikke tilstrekkelig, og dynamisk balansering i to plan er påkrevd. Selve tilnærmingen med ett plan er nærmere beskrevet under balansering i ett plan.
3. Metoder for statisk balansering
1. Knivkantbalansering
Dette er den klassiske metoden uten rotasjon. Rotoren plasseres på et par parallelle, horisontale knivkanter med lav friksjon. Den ruller til det tyngste punktet befinner seg nederst; deretter legges det til en midlertidig vekt på toppen (180° motsatt) inntil rotoren ligger stille i en hvilken som helst posisjon uten å rulle. Denne vekten gjøres deretter permanent. Det krever ingen strøm og ingen elektronikk – bare tålmodighet og et par ekte, jevne kanter – og det er fortsatt en fullt gyldig feltprøve for en smal skive.
2. Vertikal balanseringsmaskin
Moderne statisk balansering utføres ofte på en vertikal balanseringsmaskin. Rotoren – for eksempel et svinghjul eller et dekk – er plassert på en horisontal plate som støttes av kraftsensorer. Maskinen roterer den med lav hastighet, og sensorene måler størrelsen og retningen på ubalanskraften, og viser den nødvendige korreksjonen på en skjerm. Spesielt for hjul og dekk, en Kalkulator for hjulbalanseringsvekter omregner denne verdien til vektstørrelser for påklippbare eller selvklebende vekter.
3. Feltbalansering i ett plan (Balanset-1A)
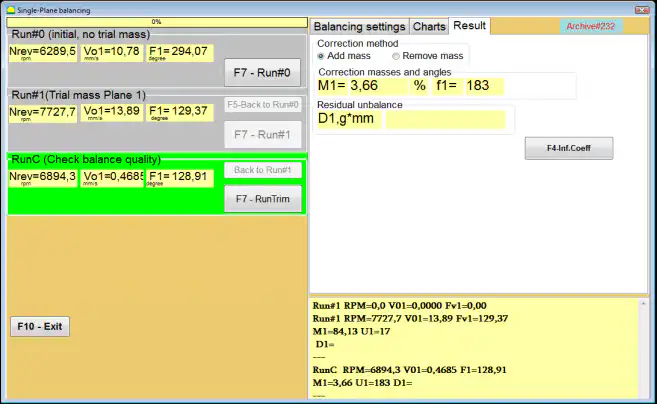
Statisk balansering i ett plan kan også utføres på en ferdig montert maskin ved hjelp av et bærbart balanseringssystem — essensen av feltbalansering. Med Balanset-1A, måler modusen «Balansering i ett plan (’statisk’)» rotorhastigheten (RPM) og vektoren til 1× vibrasjon - sin RMS verdi og fase. Ut fra målingene fra «Kjøring nr. 0» og «Kjøring nr. 1» beregner programvaren automatisk masse og installasjonsvinkel av korreksjonsvekten som trengs for å redusere rotorens ubalanse, ved hjelp av påvirkningskoeffisient metode.
Balanseringsresultatene lagres i et arkiv, og når prosessen er fullført, vil en balanserapport kan opprettes, redigeres og skrives ut i den innebygde rapportredigereren.
Slik utføres balansering i ett plan i Balanset-1A-programmet
- Installer sensorer og koble til systemet. Monter vibrasjonssensoren på det valgte målepunktet og koble den til enheten. Monter fasesensoren (turteller), fest reflekterende tape reflekterende tape på rotoren, og koble enheten til en Windows-bærbar PC.
- Start balanseringsmodus for ett plan. I hovedvinduet velger du «Enkeltplan»-modus og starter balanseringen. Programmet åpner arkivvinduet for enkeltplanbalansering.
- Opprett en arkivpost. Skriv inn rotornavn, installasjonssted, toleranser (vibrasjon og restubalanse) og dato. Programvaren oppretter en arkivmappe der diagrammer og rapportfiler lagres.
- Angi balanseringsparametere under «Balanseringsinnstillinger».
- Påvirkningskoeffisient: Velg «Ny rotor» (to gjennomkjøringer for kalibrering) eller «Lagrede koeffisienter» (én gjennomkjøring, for samme maskintype med lagrede påvirkningskoeffisienter).
- Prøvevektmasse: Velg «Gramm» eller «Prosent». Hvis du har tenkt å bruke modusen «Lagrede koeffisienter» senere, må du oppgi prøvevekt vekt i gram (vei den på vekten).
- Metode for vektfeste: Velg «Circum» (hvilken som helst vinkel på omkretsen) eller «Fixed position» (faste hull/blader/posisjoner; angi antall posisjoner).
- Radius for massemontering: angi radiusen som brukes til montering av prøve- og korreksjonsvektene.
- La prøvevekten stå i Plane1: aktiver dette bare hvis du ikke kan fjerne prøvevekten i løpet av prosessen.
- Kjør #0 (første kjøring, ingen prøvevekt). La maskinen komme opp i stabil hastighet, og start «Run #0» for å måle startvibrasjonen. Programvaren registrerer turtall, RMS-verdi og fase for 1×-vibrasjonskomponenten. Fanen «Charts» viser bølgeformen og spektrumet.
- Installer prøvevekten. Stopp maskinen og monter prøvevekten i en kjent radius. Prøvevekten må endre vibrasjonsamplituden eller -fasen betydelig. Et vanlig kriterium er «30/30-regelen»: prøvevekten bør endre amplituden med ca. 30 % (ned eller opp) eller fasen med ca. 30° eller mer. Hvis du planlegger å bruke modusen «Lagrede koeffisienter» senere, må du montere prøvevekten i samme vinkel som refleksmerket.
- Kjør #1 (prøvevekt installert). Start maskinen på nytt, vent til hastigheten er stabil, og utfør «Kjøring nr. 1». Programvaren beregner parametrene for korrigeringsvekten.
- Installer korreksjonsvekten. Stopp maskinen, fjern prøvevekten og sett inn korreksjonsvekt. Monteringsvinkelen måles fra prøvevektens posisjon i rotorens rotasjonsretning. Monter korreksjonsvekten på samme radius som prøvevekten.
- RunTrim (sjekk balansekvaliteten). Kjør «RunTrim» for å kontrollere resultatet. Hvis restvibrasjonen og/eller gjenværende ubalanse restubalanse er innenfor toleransen, kan balanseringen fullføres. Hvis ikke, beregner programvaren en ekstra korreksjonsvekt, og balanseringen fortsetter ved hjelp av suksessive tilnærminger.
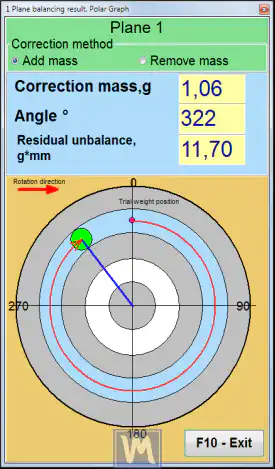
Resultatvisning: polargraf og faste posisjoner
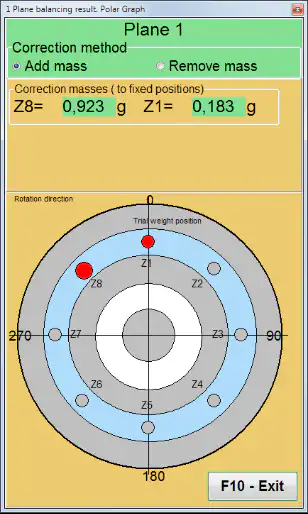
Balanset-1A kan vise korreksjonsvektens masse og vinkel i en polarkoordinatvisning. Hvis “Fast posisjon” er valgt, kan programmet automatisk dele korreksjonsvekten i to deler og vise posisjonsnumrene der hver del skal monteres — en funksjon som gjenspeiles i Kalkulator for bladkorreksjon for vifter og løpehjul med faste festepunkter.
4. Sammenligning av resultatet med toleransegrensene
En statisk balansering er først «ferdig» når restvibrasjonen og restubalansen ligger innenfor en avtalt toleranse, og det er her RunTrim-trinnet kommer til sin rett. Den tillatte restubalansen hentes normalt fra en balanseringskvalitet G-klasse i henhold til den moderne ISO 21940-11 standarden (som erstattet den eldre ISO 1940-1). Det går raskt å omregne en G-klasse og en driftshastighet til et tillatt gram-millimeter-tall – og å velge en fornuftig første testvekt – med en Kalkulator for restubalanse (ISO 21940-11) og en Kalkulator for prøvevekt. Ved å registrere både den opprinnelige og den endelige restubalansen får man et reelt mål på hvor effektivt arbeidet var, og dette utgjør kjernen i balanseringsrapporten.
5. Begrensninger
Den største begrensningen ved statisk balansering er at den ikke klarer å oppdage eller korrigere momentubalanse. Å bruke statisk balansering på en rotor som faktisk har dynamisk ubalanse, kan noen ganger forverre situasjonen – ved å korrigere kraftkomponenten mens man ignorerer, eller til og med forverrer, momentkomponenten. Av denne grunn er dynamisk balansering i to plan standard og påkrevd praksis for de fleste industrielle maskiner, og statisk balansering bør helst forbeholdes smale, skiveformede rotorer der antagelsen om ett plan virkelig gjelder.