Pochopenie statického vyvažovania (vyvažovanie v jednej rovine)







Statické vyvažovanie je najjednoduchšia forma rotora vyvažovanie. It corrects statická nevyváženosť — stav, pri ktorom rotor‘s ťažisko je posunuté od jeho osi otáčania, čím vzniká jediné „ťažké miesto“. Keďže sa toto ťažké miesto prejavuje výlučne pôsobením gravitácie, korekciu je v zásade možné vykonať pri rotore v pokoji: umiestnite rotor v čisto statickom nevyváženosť na povrchu bez trenia, ako sú napríklad ostrie nožov, a bude sa kotúľať, kým sa ťažšia časť neusadí na dne. Oprava sa vykonáva v jedna rovina — jedno korekčné závažie umiestnené v uhle 180° oproti ťažkému miestu, aby sa ťažisko vrátilo do stredu otáčania. Táto jednoduchosť v jednej rovine je veľkou silnou stránkou tejto metódy a, ako uvidíme, zároveň aj jej zásadným obmedzením.
1. Statická nevyváženosť verzus dynamická nevyváženosť
Statická nevyváženosť sa tiež nazýva „silová nevyváženosť“, pretože spôsobuje odstredivá sila pôsobiaci radiálne smerom von od stredu otáčania. Rozhodujúce je, že nevytvára žiadny „krútiaci moment“ ani kývavý pohyb. To ho odlišuje od dynamická nevyváženosť, ktorý spája silu a párová nevyváženosť a na úplné odstránenie nevyváženosti sú potrebné korekcie najmenej v dvoch rovinách. Rotor môže byť staticky dokonale vyvážený a napriek tomu vykazovať značnú momentovú nevyváženosť, ktorá spôsobuje jeho silné vibrácie pri otáčaní – preto je statické vyvažovanie samo osebe vhodné len pre určitú triedu rotorov.
2. Kedy stačí statické vyvažovanie?
Statické vyvažovanie je vhodné len pre určitú triedu rotorov. Zvyčajne sa používa pri veľmi úzkych alebo diskovitých súčiastkach, kde je axiálna dĺžka v porovnaní s priemerom malá. U takýchto rotorov je nepravdepodobné, že by vôbec existovala výrazná momentová nevyváženosť, takže korekcia v jednej rovine tento problém skutočne vyrieši.
Medzi bežné príklady, pri ktorých často postačuje statické vyvažovanie v jednej rovine, patria:
- Brúsne kotúče
- Automobilové kolesá a pneumatiky
- Jednotlivé, úzke kolesá ventilátora alebo dúchadla
- Zotrvačníky
- Kladky a remenice
Pri akomkoľvek rotore značnej dĺžky – či už ide o kotvu motora, viacstupňové čerpadlo alebo dlhú hriadeľ – nestačí len statické vyvažovanie a dynamické vyvažovanie v dve roviny je nevyhnutné. Samotný prístup v jednej rovine je podrobnejšie opísaný v časti vyvažovanie v jednej rovine.
3. Metódy statického vyvažovania
1. Vyvažovanie ostria noža
Ide o klasickú metódu bez otáčania. Rotor sa umiestni na pár paralelných, vodorovných a nízkotrecích ostrých hrán. Otáča sa, kým sa jeho najťažší bod nedostane na spodok; následne sa na vrch (v uhle 180° oproti) dočasne umiestni závažie, až kým rotor nezostane v akejkoľvek polohe bez otáčania. Toto závažie sa potom stane trvalým. Nevyžaduje žiadnu energiu ani elektroniku – len trpezlivosť a pár skutočne rovných hrán – a naďalej zostáva dokonale platnou metódou kontroly úzkeho disku v teréne.
2. Vertikálny vyvažovací stroj
Moderné statické vyvažovanie sa často vykonáva na vertikálnej osi vyvažovací stroj. Rotor – napríklad zotrvačník alebo pneumatika – je umiestnený na horizontálnej doske podopieranej snímačmi sily. Stroj ho roztáča pri nízkej rýchlosti a snímače merajú veľkosť a smer sily nevyváženosti, pričom na obrazovke zobrazujú potrebnú korekciu. Konkrétne v prípade kolies a pneumatík, Kalkulátor vyvažovacích závaží prevádza tieto hodnoty na rozmery závaží na pripnutie alebo nalepenie.
3. Vyvažovanie poľa v jednej rovine (Balanset-1A)
Statické (jednoplošné) vyvažovanie je možné vykonať aj na kompletne zmontovanom stroji pomocou prenosného vyvažovacieho systému — podstata vyvažovanie na mieste. With the Balanset-1A, režim „Vyvažovanie v jednej rovine (‚statické‘)“ meria otáčky rotora (RPM) a vektor 1× vibration — its RMS value and fáza. Na základe meraní z „Run #0“ a „Run #1“ softvér automaticky vypočíta hmotnosť a uhol inštalácie korekčnej hmotnosti potrebnej na zníženie nevyváženosti rotora pomocou koeficient vplyvu metóda.
Výsledky vyvažovania sa uložia do archívu a po dokončení sa vyvažovacia správa je možné vytvárať, upravovať a tlačiť vo vstavanom editore správ.
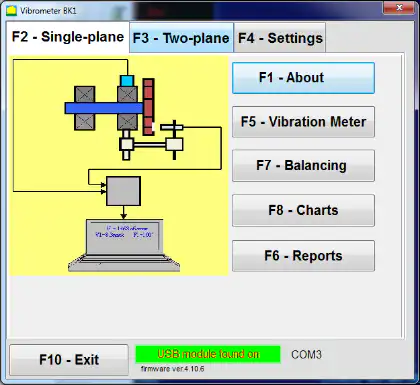
Ako sa v programe Balanset-1A vykonáva vyvažovanie v jednej rovine
- Nainštalujte snímače a pripojte systém. Namontujte snímač vibrácií na zvolené meracie miesto a pripojte ho k zariadeniu. Namontujte fázový snímač (tachometer), apply reflexná páska na rotore a pripojte zariadenie k notebooku so systémom Windows.
- Spustite režim vyvažovania v jednej rovine. V hlavnom pracovnom okne vyberte režim „Single-plane“ a spustite vyvažovanie. Program otvorí okno archívu vyvažovania v režime Single-plane.
- Vytvorenie archívneho záznamu. Zadajte názov rotora, miesto inštalácie, tolerancie (vibrácie a zostatkovú nevyváženosť) a dátum. Softvér vytvorí archívny priečinok, do ktorého sa uložia grafy a súbory správ.
- Nastavte parametre vyvažovania v časti „Nastavenia vyvažovania“.
- Koeficient vplyvu: zvoľte „Nový rotor“ (dva cykly na kalibráciu) alebo „Uložené koeficienty“ (jeden cyklus, pre rovnaký typ stroja s uloženými vplyvovými koeficientmi).
- Skúšobná hmotnosť: zvoľte „Gram“ alebo „Percent“. Ak plánujete neskôr použiť režim „Uložené koeficienty“, zadajte skúšobná hmotnosť hmotnosť v gramoch (zvážte to na váhe).
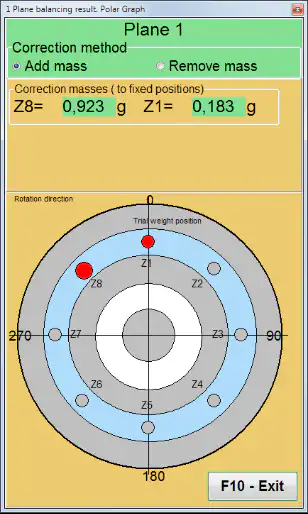
- Spôsob pripevnenia hmotnosti: zvoľte „Circum“ (ľubovoľný uhol na obvode) alebo „Fixed position“ (pevné otvory/nože/polohy; zadajte počet polôh).
- Polomer hromadnej montáže: zadajte polomer použitý na montáž skúšobného a korekčného závažia.
- Ponechajte skúšobnú hmotnosť v rovine1: túto možnosť povoľte len vtedy, ak počas procesu nemôžete odstrániť skúšobnú hmotnosť.
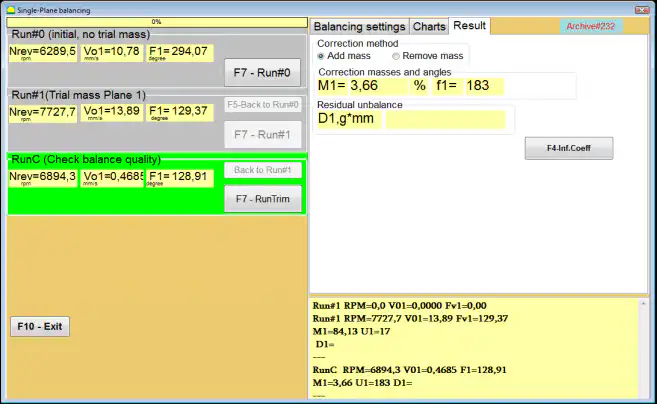
- Beh #0 (počiatočný beh, bez skúšobnej hmotnosti). Nastavte stroj na stabilné otáčky a spustite „Run #0“, aby ste zmerali počiatočné vibrácie. Softvér zaznamená otáčky, efektívnu hodnotu a fázu 1× zložky vibrácií. Na karte „Grafy“ sa zobrazí priebeh signálu a spektrum.
- Nainštalujte skúšobné závažie. Zastavte stroj a umiestnite skúšobné závažie do známeho polomeru. Skúšobné závažie musí výrazne ovplyvniť amplitúdu alebo fázu vibrácií. Bežným kritériom je „pravidlo 30/30“: skúšobné závažie by malo zmeniť amplitúdu približne o 30 % (dolu alebo hore) alebo fázu o približne 30° či viac. Ak plánujete neskôr použiť režim „Uložené koeficienty“, umiestnite skúšobné závažie do rovnakého uhla ako odrazovú značku.
- Spustite #1 (nainštalovaná skúšobná hmotnosť). Znovu spustite stroj, počkajte, kým sa rýchlosť ustáli, a spustite „Run #1“. Softvér vypočíta parametre korekčných závaží.
- Nainštalujte korekčné závažie. Zastavte stroj, odstráňte skúšobné závažie a namontujte korekčná hmotnosť. Uhol montáže sa meria od polohy skúšobného závažia v smere otáčania rotora. Korekčné závažie namontujte na rovnaký polomer ako skúšobné závažie.
- RunTrim (kontrola kvality vyváženia). Spustite funkciu „RunTrim“, aby ste overili výsledok. Ak pretrvávajú vibrácie a/alebo zvyšková nevyváženosť Ak sú podmienky splnené, vyvažovanie je možné ukončiť. V opačnom prípade softvér vypočíta dodatočné korekčné závažie a vyvažovanie pokračuje metódou postupných aproximácií.
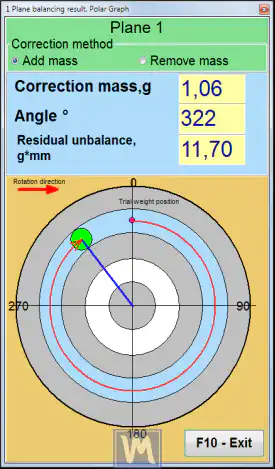
Zobrazenie výsledkov: polárny graf a pevné polohy
Balanset-1A dokáže zobraziť hmotnosť a uhol korekčnej záťaže v polárny súradnicový systém. Ak je zvolená možnosť „Pevná poloha“, program môže automaticky rozdeliť vyrovnávaciu záťaž na dve časti a zobraziť čísla polôh, kde sa má každá časť namontovať — túto praktickú funkciu odzrkadľuje aj kalkulátor korekcie ostria pre ventilátory a obežné kolesá s pevnými upevňovacími bodmi.
4. Porovnanie výsledku s toleranciou
Statické vyvažovanie je považované za „ukončené“ až vtedy, keď sa zvyškové vibrácie a zvyšková nevyváženosť pohybujú v rámci dohodnutej tolerancie, a práve tu sa prejavuje prínos kroku RunTrim. Povolená zvyšková nevyváženosť sa zvyčajne stanovuje na základe kvality vyvažovania G-trieda v rámci moderného ISO 21940-11 norma (ktorá nahradila staršiu normu ISO 1940-1). Prepočet triedy G a prevádzkovej rýchlosti na prípustnú hodnotu v gramoch na milimeter – a výber primeranej počiatočnej skúšobnej hmotnosti – je rýchly pomocou kalkulátor zvyškovej nevyváženosti (ISO 21940-11) a kalkulátor skúšobnej hmotnosti. Zaznamenanie počiatočnej aj konečnej zvyškovej nevyváženosti poskytuje objektívny obraz o účinnosti vykonanej práce a tvorí základ vyvažovacej správy.
5. Obmedzenia
Hlavným obmedzením statického vyvažovania je jeho neschopnosť zistiť alebo odstrániť momentovú nevyváženosť. Uplatnenie statického vyvažovania na rotor, ktorý má v skutočnosti dynamickú nevyváženosť, môže niekedy situáciu ešte zhoršiť – korekcia zložky sily pri ignorovaní alebo dokonca zhoršení zložky krútiaceho momentu. Z tohto dôvodu je pre väčšinu priemyselných strojov štandardnou a požadovanou praxou dvojrovinné dynamické vyvažovanie a statické vyvažovanie je najlepšie vyhradené pre úzke, diskovité rotory, kde skutočne platí predpoklad jednej roviny.