Înțelegerea echilibrării statice (echilibrare pe un singur plan)







Echilibrare statică este cea mai simplă formă de rotor echilibrare. It corrects dezechilibru static — o stare în care un rotoral cărui centru de masă este deplasat față de axa sa de rotație, creând un singur “punct greu”. Deoarece acest punct greu se manifestă doar sub acțiunea gravitației, corectarea poate fi, în principiu, efectuată cu rotorul în repaus: așezați un rotor cu dezechilibru pur static dezechilibru pe o suprafață fără frecare, cum ar fi muchiile unui cuțit, și se va rostogoli până când partea mai grea se va așeza în partea de jos. Remedierea se face într-un un singur plan — o greutate de corecție plasată la 180° față de punctul de greutate, pentru a readuce centrul de masă pe centrul de rotație. Această simplitate într-un singur plan constituie marele atu al metodei și, după cum vom vedea, totodată și limitarea sa definitorie.
1. Dezechilibru static vs. dezechilibru dinamic
Dezechilibrul static este denumit și “dezechilibru de forță”, deoarece produce o forță centrifugă care acționează radial spre exterior, pornind de la centrul de rotație. Un aspect esențial este faptul că nu produce niciun “cuplu” sau mișcare de balansare. Acest lucru îl deosebește de dezechilibru dinamic, care îmbină forța și dezechilibrul cuplului și necesită corecții în cel puțin două planuri pentru a fi remediat complet. Un rotor poate fi perfect echilibrat static și totuși să prezinte un dezechilibru de cuplu semnificativ care îl face să vibreze puternic odată ce începe să se rotească — motiv pentru care echilibrarea statică, luată separat, este adecvată doar pentru o anumită categorie de rotoare.
2. Când este suficientă echilibrarea statică?
Echilibrarea statică este indicată doar pentru o anumită categorie de rotoare. Aceasta este, în general, rezervată componentelor foarte înguste sau în formă de disc, la care lungimea axială este mică în comparație cu diametrul. În cazul acestor rotoare, este puțin probabil să existe un dezechilibru de cuplu semnificativ, astfel încât o corecție într-un singur plan rezolvă cu adevărat problema.
Printre exemplele obișnuite în care echilibrarea statică pe un singur plan este adesea suficientă se numără:
- Discuri abrazive
- Jante și anvelope auto
- Roți simple, înguste pentru ventilator sau suflantă
- Volante
- Fulii și roți de curea
Pentru orice rotor de lungime considerabilă — indusul unui motor, o pompă multietajată sau un arbore lung — echilibrarea statică nu este suficientă și echilibrare dinamică în două planuri este necesară. Abordarea pe un singur plan este descrisă mai detaliat în secțiunea echilibrare pe un singur plan.
3. Metode de echilibrare statică
1. Echilibrarea pe muchie de cuțit
Aceasta este metoda clasică, fără rotație. Rotorul este așezat pe o pereche de muchii paralele, orizontale și cu frecare redusă. Acesta se rostogolește până când punctul său cel mai greu ajunge în partea de jos; apoi se adaugă o greutate temporară în partea de sus (la 180° opus) până când rotorul se oprește în orice poziție fără să se mai rostogolească. Această greutate este apoi fixată definitiv. Nu are nevoie de energie electrică și nici de componente electronice — doar de răbdare și de o pereche de muchii adevărate și orizontale — și rămâne o verificare de teren perfect valabilă pentru un disc îngust.
2. Mașină de echilibrare verticală
Echilibrarea statică modernă se realizează adesea pe o axă verticală mașină de echilibrat. Rotorul — de exemplu, un volant sau o anvelopă — este așezat pe o placă orizontală susținută de senzori de forță. Aparatul îl rotește la viteză redusă, iar senzorii măsoară amplitudinea și direcția forței de dezechilibru, afișând corecția necesară pe un ecran. În cazul roților și anvelopelor, în mod special, un calculator pentru greutăți de echilibrare a roților transformă aceste valori în greutăți cu prindere prin clemă sau adezive.
3. Echilibrarea câmpului pe un singur plan (Balanset-1A)
Echilibrarea statică (într-un singur plan) poate fi efectuată și pe o mașină complet asamblată, folosind un sistem portabil de echilibrare — esența echilibrarea la fața locului. With the Balanset-1A, modul „Echilibrare într-un singur plan («static»)” măsoară turația rotorului (RPM) și vectorul 1× vibration — its RMS value and fază. Pe baza măsurătorilor din „Run #0” și „Run #1”, programul calculează automat masa și unghi de instalare a greutății de corecție necesare pentru a reduce dezechilibrul rotorului, folosind coeficientul de influență method.
Rezultatele echilibrării sunt salvate într-o arhivă, iar la finalizare se raport de echilibrare pot fi create, editate și tipărite în editorul de rapoarte integrat.
Cum se realizează echilibrarea pe un singur plan în programul Balanset-1A
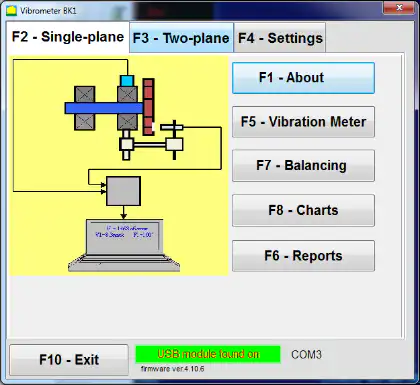
- Instalați senzorii și conectați sistemul. Instalați senzorul de vibrații în punctul de măsurare ales și conectați-l la dispozitiv. Instalați senzorul de fază (tahometru), apply bandă reflectorizantă pe rotor și conectați dispozitivul la un laptop cu Windows.
- Porniți modul de echilibrare pe un singur plan. În fereastra principală de operare, selectați modul „Single-plane” și începeți echilibrarea. Programul deschide fereastra arhivei de echilibrare pe un singur plan.
- Creați o înregistrare de arhivă. Introduceți numele rotorului, locul de instalare, toleranțele (vibrații și dezechilibru rezidual) și data. Programul creează un folder de arhivă în care vor fi salvate graficele și fișierele cu rapoarte.
- Setați parametrii de echilibrare în secțiunea „Setări de echilibrare”.
- Coeficient de influență: selectați „Rotor nou” (două cicluri de calibrare) sau „Coeficienți salvați” (un singur ciclu, pentru același tip de mașină cu coeficienți de influență salvați).
- Masa greutății de probă: alegeți „Gram” sau „Procent”. Dacă intenționați să utilizați mai târziu modul „Coeficienți salvați”, introduceți greutate de probă masa în grame (cântăriți-o pe cântar).
- Metodă de fixare a greutății: selectați „Circum” (orice unghi pe circumferință) sau „Poziție fixă” (găuri/lame/poziții fixe; introduceți numărul de poziții).
- Raza de montare a masei: introduceți raza utilizată pentru montarea greutăților de probă și de corecție.
- Lăsați greutatea de probă în planul 1: activați acest lucru numai dacă nu puteți elimina greutatea de probă în timpul procesului.
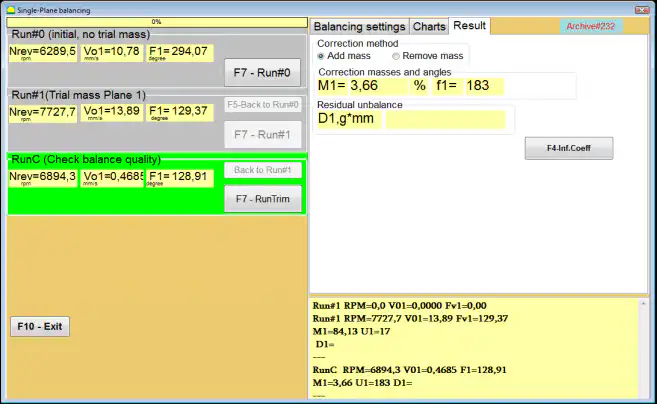
- Rularea #0 (rulare inițială, fără greutate de probă). Aduceți mașina la o turație stabilă și porniți „Run #0” pentru a măsura vibrațiile inițiale. Programul înregistrează turația (RPM), valoarea RMS și faza componentei de vibrație de ordinul 1. Fila „Charts” afișează forma de undă și spectrul.
- Instalați greutatea de probă. Opriți mașina și montați greutatea de probă la o rază cunoscută. Greutatea de probă trebuie să modifice semnificativ amplitudinea sau faza vibrațiilor. Un criteriu obișnuit este „regula 30/30”: greutatea de probă ar trebui să modifice amplitudinea cu aproximativ 30% (în jos sau în sus) sau faza cu aproximativ 30° sau mai mult. Dacă intenționați să utilizați ulterior modul „Coeficienți salvați”, montați greutatea de probă la același unghi ca și marcajul reflectorizant.
- Rularea #1 (greutatea de probă instalată). Reporniți mașina, așteptați atingerea unei viteze stabile și efectuați „Run #1”. Programul calculează parametrii de corecție a greutății.
- Instalați greutatea de corecție. Opriți mașina, scoateți greutatea de probă și montați greutatea de corecție. Unghiul de montare se măsoară de la poziția greutății de probă în direcția de rotație a rotorului. Montați greutatea de corecție pe aceeași rază cu greutatea de probă.
- RunTrim (verificați calitatea echilibrului). Executați comanda „RunTrim” pentru a verifica rezultatul. Dacă vibrațiile reziduale și/sau dezechilibru rezidual Dacă se respectă toleranța, echilibrarea poate fi finalizată. În caz contrar, programul calculează o greutate de corecție suplimentară, iar echilibrarea continuă prin aproximări succesive.
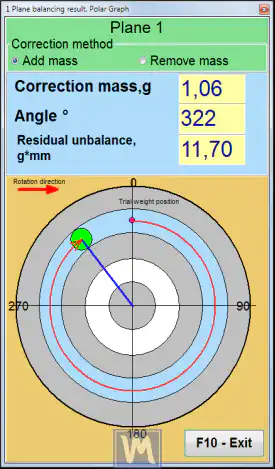
Vizualizarea rezultatelor: grafic polar și poziții fixe
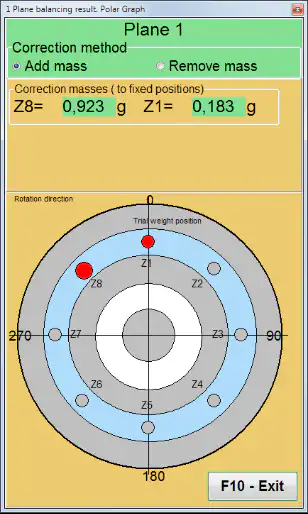
Balanset-1A poate afișa masa și unghiul greutății de corecție într-un reprezentare în coordonate polare. Dacă se selectează opțiunea „Poziție fixă”, programul poate împărți automat greutatea de corecție în două părți și poate afișa numerele de poziție unde trebuie instalată fiecare parte — o facilitate reflectată de calculator pentru corectarea lamei pentru ventilatoare și rotoare cu puncte de fixare fixe.
4. Verificarea rezultatului în raport cu limitele de toleranță
O echilibrare statică este considerată „finalizată” doar atunci când vibrațiile reziduale și dezechilibrul rezidual se încadrează într-o toleranță stabilită, iar aici intervine etapa RunTrim. Dezechilibrul rezidual admisibil este stabilit, de obicei, în funcție de calitatea echilibrării Grad G în contextul modern ISO 21940-11 standard (care a înlocuit vechiul standard ISO 1940-1). Transformarea unui grad G și a unei viteze de funcționare într-o valoare admisibilă în grame-milimetri — precum și alegerea unei greutăți de testare inițiale adecvate — se realizează rapid cu ajutorul unui calculator pentru dezechilibrul rezidual (ISO 21940-11) și o calculator pentru greutatea de probă. Înregistrarea atât a dezechilibrului rezidual inițial, cât și a celui final oferă o evaluare realistă a eficienței operațiunii și constituie elementul central al raportului de echilibrare.
5. Limitări
Principala limitare a echilibrării statice este incapacitatea sa de a detecta sau corecta dezechilibrul de cuplu. Aplicarea echilibrării statice unui rotor care prezintă de fapt un dezechilibru dinamic poate agrava uneori situația — corectând componenta de forță, dar ignorând sau chiar agravând componenta de cuplu. Din acest motiv, pentru majoritatea utilajelor industriale, echilibrarea dinamică în două planuri este practica standard și obligatorie, iar echilibrarea statică este recomandată mai degrabă pentru rotoarele înguste, în formă de disc, unde ipoteza unui singur plan se aplică cu adevărat.