정적 밸런싱(단일 평면 밸런싱) 이해







정적 밸런싱 로터의 가장 단순한 형태입니다 밸런싱. 다음을 수정합니다. 정적 불균형 — ~인 상태 로터회전체의 질량 중심은 회전축에서 벗어나 있어 하나의 “무거운 지점”을 형성합니다. 이 무거운 지점은 중력 작용 하에서만 드러나기 때문에, 원칙적으로 로터가 정지한 상태에서도 보정을 수행할 수 있습니다. 순수한 정적 불균형 칼날과 같이 마찰이 없는 표면 위에서는, 무거운 부분이 바닥에 가라앉을 때까지 굴러갈 것입니다. 이 문제는 단일 평면 — 질량 중심을 회전 중심으로 되돌리기 위해, 무거운 지점과 180° 반대편에 하나의 보정 추를 배치한다. 이러한 단일 평면 구조의 단순함이 이 방법의 가장 큰 장점이자, 뒤에서 보게 되겠지만 동시에 결정적인 한계이기도 하다.
1. 정적 불균형 대 동적 불균형
정적 불균형은 “힘의 불균형”이라고도 불리는데, 이는 원심력 회전 중심에서 바깥쪽으로 방사형으로 작용한다. 무엇보다 중요한 점은, 이 힘이 “토크”나 흔들림 현상을 일으키지 않는다는 것이다. 이것이 바로 동적 불균형, 이는 힘과 부부 불균형 그리고 이를 완전히 해결하려면 최소 두 방향에서 보정이 필요합니다. 로터는 정적 균형이 완벽하게 잡혀 있어도 회전 시 심각한 진동을 일으키는 상당한 토크 불균형을 가질 수 있습니다. 바로 이 때문에 정적 균형만으로는 특정 종류의 로터에만 적합할 뿐입니다.
2. 정적 밸런싱만으로도 충분한 경우는 언제인가?
정적 균형 조정은 특정 유형의 로터에만 적합합니다. 이는 일반적으로 직경에 비해 축 방향 길이가 짧은, 매우 좁거나 원반형인 부품에 한정됩니다. 이러한 로터의 경우 애초에 상당한 토크 불균형이 발생할 가능성이 낮으므로, 단일 평면 보정만으로도 문제를 충분히 해결할 수 있습니다.
단일 평면 정적 밸런싱으로 충분한 일반적인 사례로는 다음이 있습니다:
- 연삭 휠
- 자동차 휠 및 타이어
- 단일, 좁은 팬 또는 블로어 휠
- 플라이휠
- 풀리와 쉬브
길이가 상당한 로터(모터 전기자, 다단 펌프, 긴 축 등)의 경우, 정적 균형 조정만으로는 충분하지 않으며 동적 밸런싱 in 두 대의 비행기 이 필요합니다. 단일 평면 접근법 자체에 대한 자세한 내용은 단일 평면 밸런싱.
3. 정적 밸런싱 방법
1. 나이프 엣지 밸런싱
이것은 고전적인 비회전 방식입니다. 로터를 평행하고 수평을 이룬 마찰이 적은 두 개의 날카로운 모서리 위에 올려놓습니다. 로터는 가장 무거운 부분이 아래로 향할 때까지 굴러가게 한 다음, 로터가 굴러가지 않고 어떤 위치에서든 멈출 때까지 상단(180도 반대쪽)에 임시 추를 얹습니다. 그런 다음 그 추를 영구적으로 고정합니다. 전원이나 전자 장치가 필요하지 않으며, 오직 인내심과 수평을 정확히 맞춘 한 쌍의 날만 있으면 됩니다. 이는 좁은 원반에 대한 여전히 완벽하게 유효한 현장 점검 방법입니다.
2. 수직 밸런싱 머신
현대적인 정적 밸런싱은 대개 수직 상태에서 수행됩니다 밸런싱 머신. 로터(예: 플라이휠이나 타이어)는 힘 센서로 지지되는 수평 판 위에 놓입니다. 기계가 이를 저속으로 회전시키면 센서가 불균형 힘의 크기와 방향을 측정하여 화면에 필요한 보정 사항을 표시합니다. 특히 바퀴와 타이어의 경우, 휠 밸런싱 웨이트 계산기 이를 클립형 또는 접착식 추의 크기로 변환합니다.
3. 단일 평면 필드 밸런싱(Balanset-1A)
휴대용 밸런싱 시스템을 사용하면 완전히 조립된 기계에서도 정적(단면) 밸런싱을 수행할 수 있으며, 이는 바로 필드 밸런싱. 와 함께 발란셋-1A, “단일 평면 균형 조정(‘정적’)” 모드는 로터 속도(RPM)와 벡터를 측정합니다. 1× 진동 - 그것의 RMS 가치와 단계. “Run #0” 및 “Run #1” 측정값을 바탕으로 소프트웨어가 자동으로 대량의 및 설치 각도 로터의 불균형을 줄이기 위해 필요한 보정 추의 양을, 다음을 사용하여 영향 계수 메서드를 사용합니다.
균형 조정 결과는 아카이브에 저장되며, 완료되면 수지 보고서 내장된 보고서 편집기에서 생성, 편집 및 인쇄할 수 있습니다.
Balanset-1A 프로그램에서 단일 평면 밸런싱이 수행되는 방법
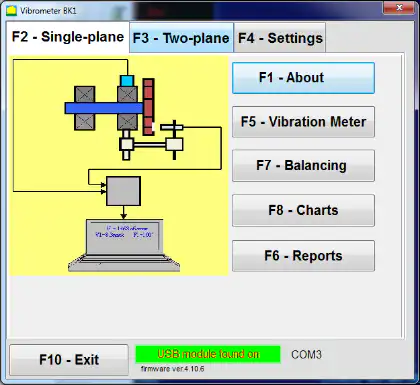
- 센서를 설치하고 시스템을 연결합니다. 선택한 측정 지점에 진동 센서를 설치하고 장치에 연결하십시오. 위상 센서를 설치하고 (유속계), 적용 반사 테이프 로터에 장착한 후, 장치를 Windows 노트북에 연결하십시오.
- 싱글 플레인 밸런싱 모드를 시작합니다. 메인 작업 창에서 “단일 평면” 모드를 선택하고 밸런싱을 시작하십시오. 그러면 프로그램이 단일 평면 밸런싱 기록 창을 열게 됩니다.
- 아카이브 레코드를 만듭니다. 로터 이름, 설치 장소, 허용 오차(진동 및 잔류 불균형), 그리고 날짜를 입력하십시오. 소프트웨어는 차트와 보고서 파일이 저장될 아카이브 폴더를 생성합니다.
- “균형 조정 설정”에서 균형 조정 매개변수를 설정하십시오.
- 영향 계수: “새 로터”(보정용 2회 실행) 또는 “저장된 계수”(동일한 유형의 기계에 대해 영향 계수가 저장된 경우, 1회 실행)를 선택하십시오.
- 시험용 체중 질량: “Gramm” 또는 “Percent”를 선택하십시오. 나중에 “Saved coeff.” 모드를 사용할 계획이라면, 시험 중량 질량(그램 단위)(저울에 달아 측정하세요).
- 무게 부착 방법: “원주상(Circum)”(원주상의 임의의 각도) 또는 “고정 위치(Fixed position)”(고정된 구멍/날/위치; 위치 수 입력)를 선택하십시오.
- 매스 마운트 반경: 시험 및 보정 가중치를 장착하는 데 사용되는 반경을 입력합니다.
- Plane1에 평가판 무게를 그대로 둡니다: 프로세스 중에 평가판 무게를 제거할 수 없는 경우에만 이 기능을 활성화합니다.
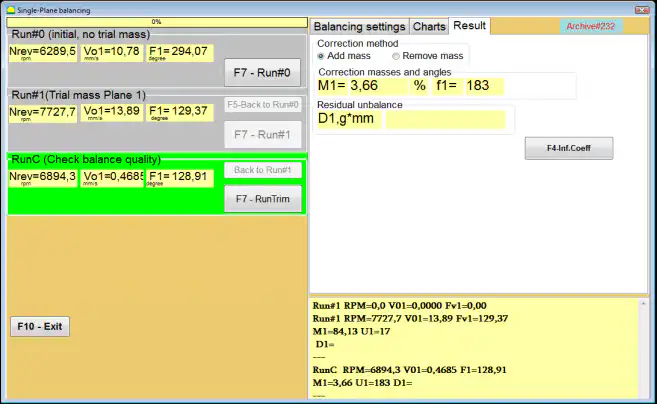
- #0 실행(초기 실행, 트라이얼 웨이트 없음). 기계를 안정된 속도로 가동한 후 “Run #0”을 실행하여 초기 진동을 측정합니다. 소프트웨어는 1× 진동 성분의 RPM, RMS 값 및 위상을 기록합니다. “차트” 탭에서는 파형과 스펙트럼을 확인할 수 있습니다.
- 체험판 웨이트를 설치합니다. 기계를 정지시킨 후, 반지름이 알려진 시험 추를 장착하십시오. 시험 추는 진동의 진폭이나 위상을 현저하게 변화시켜야 합니다. 일반적인 기준으로는 “30/30 법칙”이 있습니다. 즉, 시험 추는 진폭을 약 30%(증가 또는 감소) 정도, 또는 위상을 약 30° 이상 변화시켜야 합니다. 나중에 “저장된 계수(Saved coeff.)” 모드를 사용할 계획이라면, 시험 추를 반사 마크와 동일한 각도로 장착하십시오.
- #1(시험용 웨이트 설치)을 실행합니다. 기계를 재시동하고 속도가 안정될 때까지 기다린 후 “Run #1”을 실행하십시오. 소프트웨어가 보정 중량 매개변수를 계산합니다.
- 보정 웨이트를 설치합니다. 기계를 정지시키고, 시험 하중을 제거한 다음, 보정 무게. 설치 각도는 시험용 추의 위치에서 로터 회전 방향으로 측정합니다. 보정 추는 시험용 추와 동일한 반경에 설치하십시오.
- RunTrim(잔액 품질 확인). “RunTrim”을 실행하여 결과를 확인하십시오. 잔류 진동 및/또는 잔류 불균형 공차 기준을 충족하면 밸런싱이 완료됩니다. 그렇지 않은 경우, 소프트웨어가 추가 보정 추를 계산하고 근사법을 반복하여 밸런싱을 계속합니다.
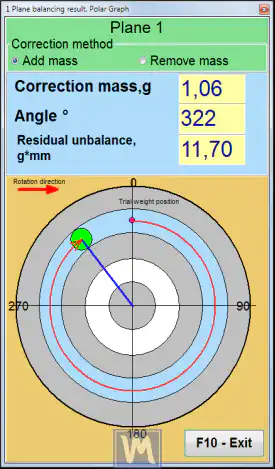
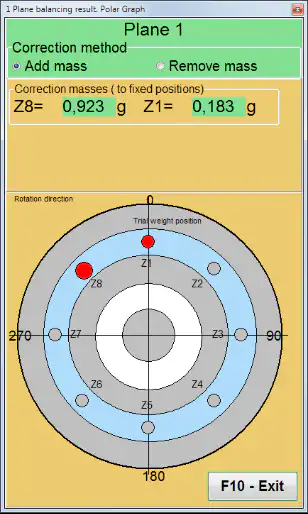
결과 시각화: 극좌표 그래프 및 고정 위치
Balanset-1A는 보정 추의 질량과 각도를 극좌표 투영. “고정 위치”를 선택하면 프로그램이 보정 추를 자동으로 두 부분으로 나누어 각 부분이 설치되어야 할 위치 번호를 표시해 줍니다. 이는 블레이드 보정 계산기 고정식 장착 지점이 있는 팬 및 임펠러용.
4. 허용 오차 대비 결과 확인
정적 밸런싱은 잔류 진동과 잔류 불균형이 합의된 허용 오차 범위 내에 들어야 비로소 “완료”된 것으로 간주되며, 바로 이 단계에서 RunTrim 단계의 진가가 발휘됩니다. 허용 가능한 잔류 불균형은 일반적으로 밸런싱 품질 기준에서 도출됩니다. G등급 현대적 ISO 21940-11 표준(이전 ISO 1940-1을 통합한 것). G 등급과 서비스 속도를 허용 그램-밀리미터 수치로 변환하고, 적절한 초기 시험 중량을 선정하는 작업은 잔류 불균형 계산기 (ISO 21940-11) 그리고 체험판 무게 계산기. 초기 및 최종 잔여 불균형을 모두 기록함으로써 작업의 효과를 객관적으로 평가할 수 있으며, 이는 밸런싱 보고서의 핵심을 이룹니다.
5. 제한 사항
정적 밸런싱의 가장 큰 한계는 토크 불균형을 감지하거나 보정할 수 없다는 점입니다. 실제로 동적 불균형이 있는 로터에 정적 밸런싱을 적용하면, 힘 성분을 보정하는 동안 토크 성분을 무시하거나 심지어 악화시켜 상황을 더 나쁘게 만들 수도 있습니다. 이러한 이유로 대부분의 산업용 기계에서는 2면 동적 밸런싱이 표준이자 필수적인 관행이며, 정적 밸런싱은 단일면 가정이 실제로 성립하는 좁고 원반형의 로터에 한정하여 사용하는 것이 가장 좋습니다.
