שירותי איזון › איזון דו-מישורי (דינמי)
איזון דו-מישורי (דינמי) — שיטה, פיזיקה והליך בשטח
כאשר הרוטור רחב דיו כך שהחוסר איזון שונה בכל קצה, מישור תיקון אחד אינו מספיק. איזון דינמי דו-מישורי מתקן בו-זמנית את הרכיבים הסטטיים ואת רכיבי הזוג — באמצעות ה שיטת מקדם ההשפעה — כך שהרוטור מסתובב בצורה חלקה לאורך כל אורכו, ולא רק במרכזו.
בקיצור: איזון דו-מישורי (דינמי) נדרש בכל מצב שבו רוטור נושא גם חוסר איזון סטטי וגם רכיב זוגי — כלומר, חוסר האיזון מפוזר לאורך ציר הפיר במקום להיות מרוכז בדיסק אחד. חיישן רטט על כל בית מיסב ומד טכומטר לייזר על הפיר משמשים למדידת תגובת הרוטור’ למשקולות ניסוי המונחות בתורן בכל מישור; לאחר מכן Balanset-1A פותר בו-זמנית את מסת התיקון והזווית המדויקות בשני המישורים. אין צורך להוציא את הרוטור מהמכונה — כל הליך ארבע הריצות מושלם במהירות פעולה, במיסבי הרוטור’ עצמו, בפחות משעה עבור רוב הרוטורים.
סימנים לכך שהרוטור שלך זקוק לאיזון דו-מישורי
תיקון במישור אחד עשוי להשתיק מיסב אחד, בעוד שהשני עדיין רועד. אם אתם מבחינים באחד מהדפוסים הללו, הטיפול הנכון הוא טיפול בשני מישורים:
מישור אחד לעומת שני מישורים: מתי יש צורך בשני מישורים?
הבחירה בין מישור תיקון אחד לשניים תלויה בגיאומטריה של הרוטור ובאופי חוסר האיזון שלו. הבנת שלושת סוגי חוסר האיזון תסייע לכם לקבל החלטה מיידית.
שלושת סוגי חוסר האיזון
חוסר איזון סטטי — מרכז המסה אינו נמצא על ציר הסיבוב, אך ציר האינרציה הראשי מקביל אליו. די במישור תיקון אחד: הוספת מסה בצד הכבד תביא לאיזון הרוטור. דוגמאות לרוטורים אופייניים: גלגלות דקות, גלגלי ליטוש צרים, דיסקי מאוורר חד-מישוריים.
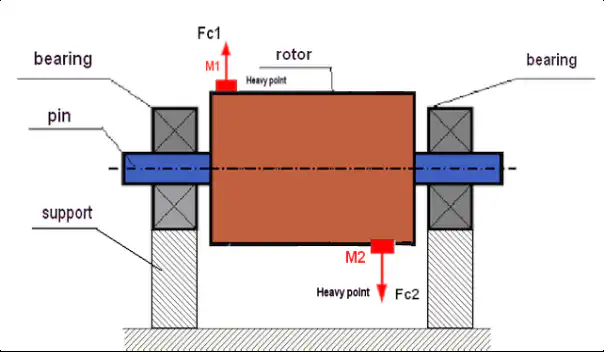
חוסר איזון זוגי — מרכז המסה נמצא על הציר, אך ציר האינרציה הראשי מוטה. הרוטור מתנדנד ולא מתנודד. לא ניתן לתקן זאת במישור אחד; נדרשים שני גופים בעלי מסה שווה ומנוגדת, המרוחקים זה מזה ב-180°, בשני מישורים נפרדים, כדי לבטל את מומנט התנודה. דוגמאות לרוטורים: תופים גליליים ארוכים, ארמטורות מנוע, מכלולי פירים.
חוסר איזון דינמי (משולב) — המקרה הכללי: קיימים הן רכיבים סטטיים והן רכיבים זוגיים. התיקון מחייב בחירה של שני מישורים באופן שרירותי לאורך הפיר. כל הרוטורים המיוצרים בפועל נכללים בקטגוריה זו.
| מקדם | מישור יחיד (סטטי) | דו-מישורי (דינמי) |
|---|---|---|
| צורת הרוטור | דיסק דק; רוחבו הצירתי קטן בהרבה מקוטרו | רוטור רחב; רוחב צירי השווה לקוטר או גדול ממנו |
| סוג חוסר איזון | חוסר איזון סטטי בלבד | חוסר איזון זוגי או משולב (דינמי) |
| יחס L/D (אורך צירי / קוטר) | יחס האורך-רוחב < 0.5 (בערך) | L/D ≥ 0.5 (רוטור קשיח הפועל מתחת למהירות הקריטית הראשונה שלו). בסמוך למהירות קריטית או מעליה, יש להעריך תחילה את הרוטור כגמיש (ISO 21940-12) — איזון בשני מישורים לבדו עלול שלא להספיק |
| מספר החיישנים | חיישן רטט אחד + מד סל"ד לייזר אחד | 2 חיישני רטט + 1 מד מהירות לייזר |
| מספר מחזורי המדידה | 3 מחזורים (בסיס + ניסוי + תיקון) | 4 ריצות (קו בסיס + ניסוי במישור 1 + ניסוי במישור 2 + תיקון) |
| מישורי תיקון | 1 | 2 |
| ציוד טיפוסי | אימפלרים צרים, גלגלות, דיסקים חד-שלביים | תופים, צירים, אימפלרים רחבים, רוטורים רב-שלביים, רוטורי מנוע |
| ייחוס סטנדרטי | ISO 21940-11 (רוטור קשיח חד-מישורי) | ISO 21940-11 (רוטור קשיח דו-מישורי) |
כלל אצבע: אם תנודת הרוטור הנמדדת באחד המסבים משתנה בכיוון הפוך לתנודה במסב השני כאשר מזיזים משקולת ניסוי, קיים מרכיב זוגתי ויש צורך בשני מישורים.
מדוע רוטורים רחבים מאבדים איזון דינמי — ומה העלות הכרוכה בכך
בעת ייצור או תיקון של רוטור, לעיתים נדירות מתפזר המסה באופן סימטרי לאורך ציר הרוטור. השחיקה פוגעת בקצה אחד של המדחף בקצב מהיר יותר מאשר בקצה השני; תיקוני ריתוך מוסיפים חומר בנקודה אחת לאורך הציר; והצטברות של חומר מצטברת באופן לא אחיד לאורך התוף. התוצאה היא לא רק חוסר איזון סטטי, אלא גם זוגי רכיב שיוצר מומנט נדנוד. רק תיקון בו-זמני בשני מישורים מבטל את שניהם. מכיוון שכוח הצנטריפוגלי גדל עם ה מְרוּבָּע של מהירות הסיבוב, חוסר איזון זוגי מתון ב-500 RPM הופך לכוח הרסני ב-3,000 RPM.
התעלמות ממרכיב הזוגיות פירושה ששני המסבים נושאים עומסים דינמיים מוגברים בכל סיבוב. העייפות במסבים מצטברת, האטמים מתקלקלים, מחברי ההידוק מתרופפים, וסדקים מבניים מתפשטים מרגלי ההרכבה כלפי חוץ. ההפסד הכלכלי — מסבים, אטמים, אובדן ייצור, כוח אדם לשעת חירום — עולה בדרך כלל פי כמה על העלות של עבודה נכונה בשני מישורים.
מדוע הפחתת הרטט בחצי מאריכה את חיי המסב
איזון דו-מישורי — נוהל שטח שלב אחר שלב
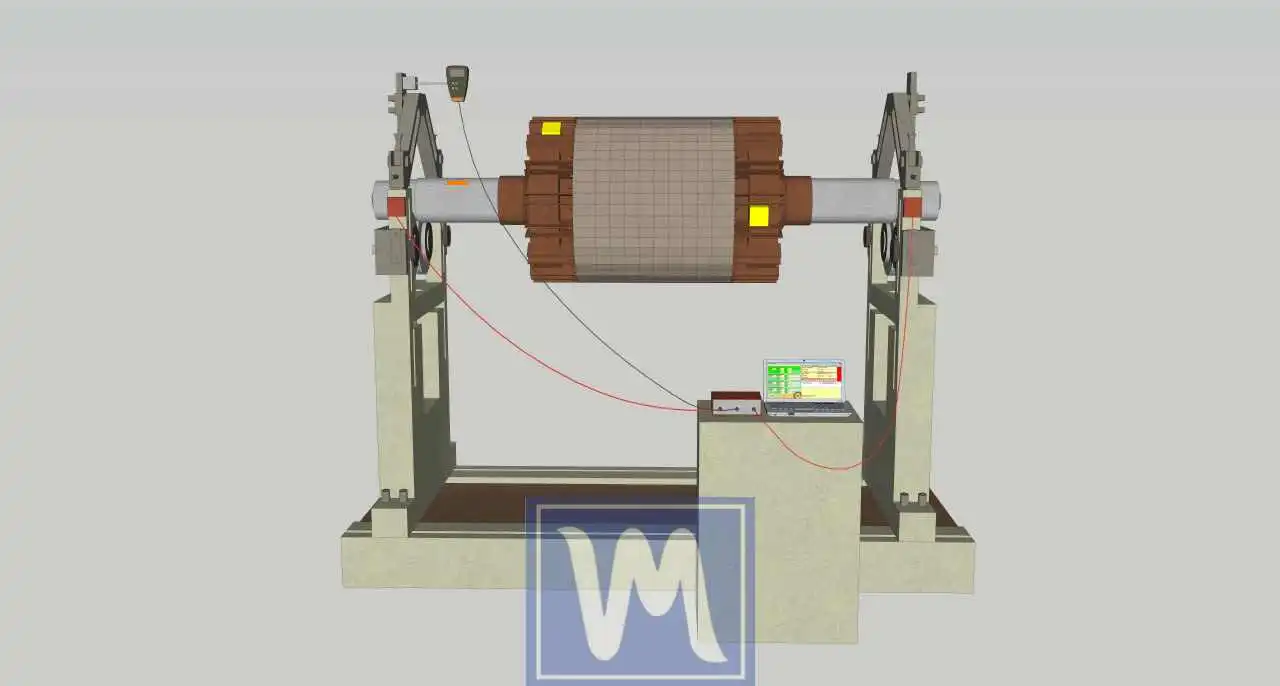
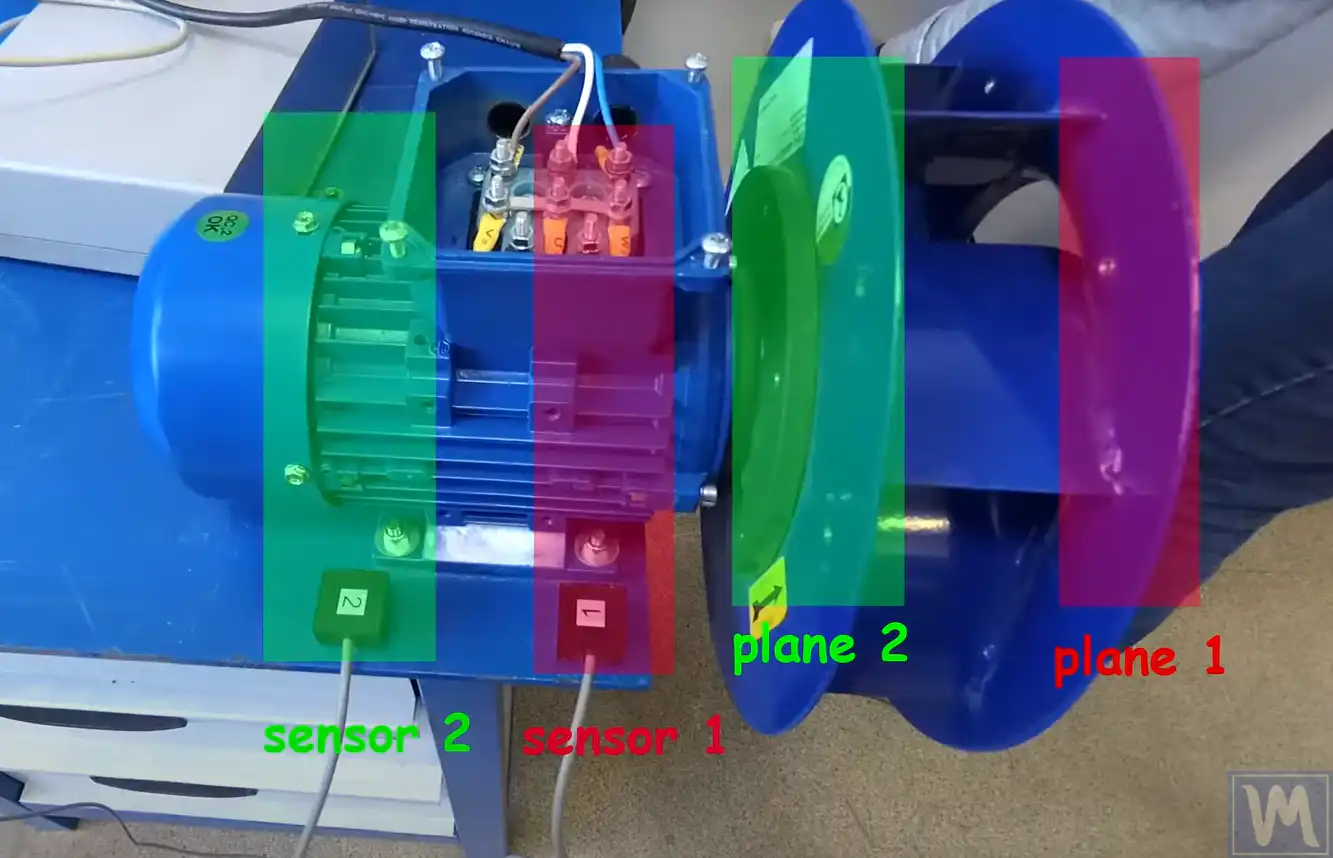
ה-Balanset-1A משתמש בשיטת מקדם ההשפעה. שני חיישני רטט ומד מהירות לייזר אחד מאפשרים לאפיין את הרוטור באופן מלא ולחשב את שני מישורי התיקון בפעולה אחת המתבצעת באתר:
- התקן את החיישנים. יש להרכיב מד תאוצה לכל בית מיסב (מישורים 1 ו-2) ולכוון את מד הסל"ד הלייזר אל רצועת החזרה על הפיר. אין צורך בפירוק — הרוטור ממשיך לפעול בתנאי פעולה רגילים לאורך כל התהליך.
- מדוד את קו הבסיס. ריצה אחת במהירות פעולה מלאה מתעדת בו-זמנית את משרעת הרטט ואת זווית הפאזה בשני מיקומי המיסבים, ונותנת את וקטורי ה-1× RPM ההתחלתיים שמגדירים את מצב חוסר האיזון הראשוני בשני המישורים.
- הוסף משקל ניסיון במישור 1. מסה ידועה מהודקת במיקום זוויתי מסומן במישור התיקון הראשון. בסבב השני נמדדת השפעת משקל זה על הרטט ב- שְׁנֵיהֶם מיקומי המסבים, המניבים שניים מארבעת מקדמי ההשפעה.
- העבר את משקל הניסוי למישור 2. אותה מסה מועברת למישור התיקון השני, וריצה נוספת מתעדת את ההשפעה ההדדית על שני החיישנים. כעת יש למכשיר את כל ארבעת מקדמי ההשפעה הדרושים למערכת 2×2.
- תן למכשיר לחשב. Balanset-1A פותר את משוואות מקדם ההשפעה הדו-מישוריות ומציג בו-זמנית את מסת התיקון ואת המיקום הזוויתי המדויקים לכל מישור — ללא צורך בחישוב ידני.
- בצע תיקונים ובדוק. משקלי התיקון ממוקמים במיקומים שחושבו בשני המישורים. ריצה סופית מאשרת כי חוסר האיזון השיורי נמצא בתוך טווח הסבילות של תקן ISO 21940-11 עבור דרגת ה-G שצוינה, והמכשיר Balanset-1A שומר דוח איזון מתועד.
מה שאנו מאזנים בשני מישורים
- אימפלרים רחבים למאווררים צנטריפוגליים ומפוחים בעלי כניסה כפולה
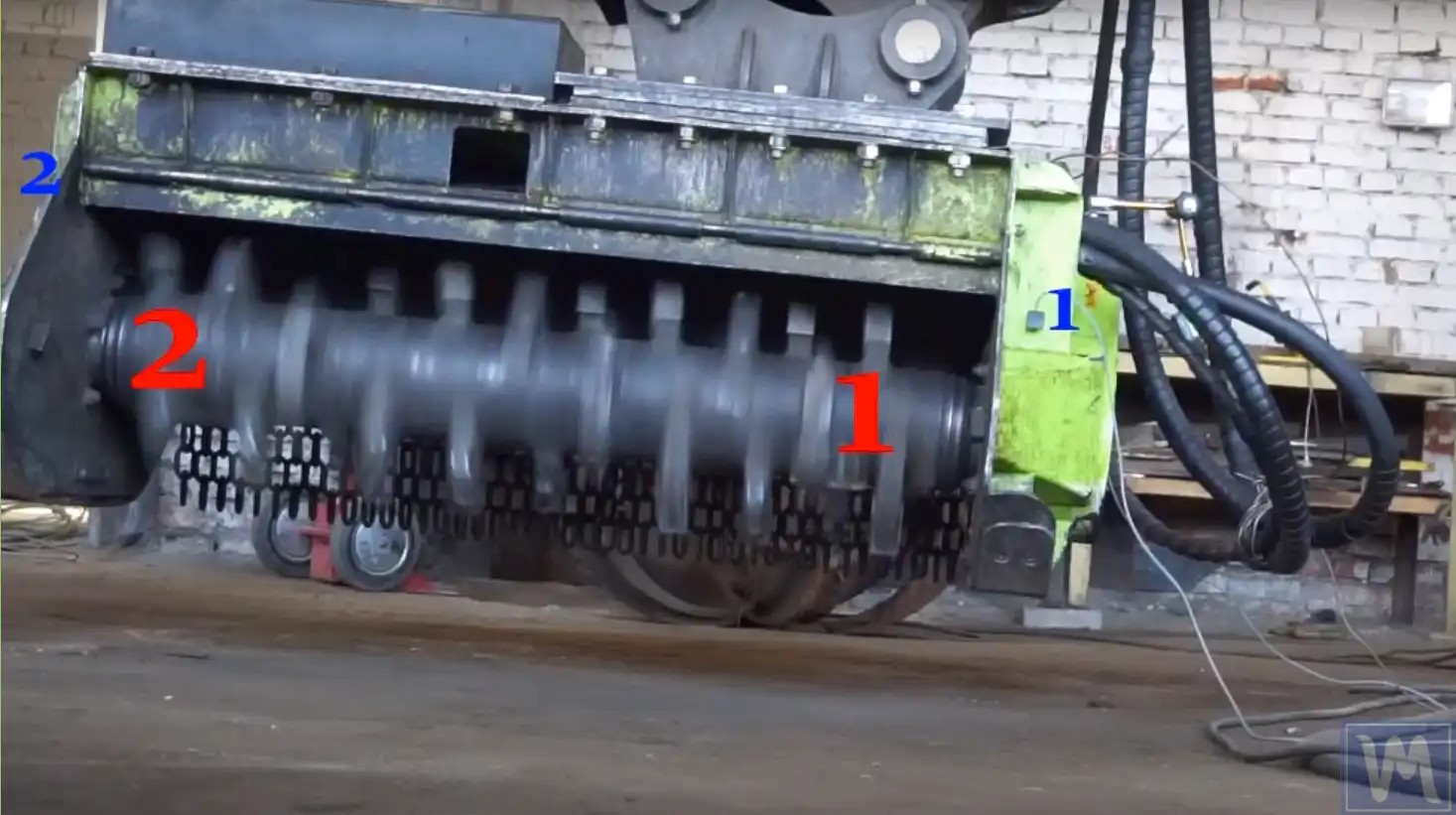
- תופי דיש וקיצוץ של קומביין
- צירי הנעה וצירי קרדן
- רוטורים למשאבות רב-שלביות ומערך אימפלרים למדחסים
- גלילי מכונות נייר וצילינדרים להדפסה ולציפוי
- מסועי בורג ואוגרים ארוכים מכ-500 מ"מ
- רוטורים של מנועים ורוטורים של גנרטורים בעלי אורך צירי משמעותי
- רוטורים של מגדש טורבו ורוטורים של טורבינות קיטור (אימות רטט בשטח)
- כל רוטור שבו תיקון במישור אחד מותיר מיסב אחד עדיין רועד
סבילויות & תקנים
ISO 21940-11 (לשעבר ISO 1940-1) מגדיר דרגות איכות איזון G0.4 עד G4000 עבור רוטורים קשיחים. עבור רוטורים קשיחים — כאלה הפועלים הרבה מתחת למהירות הקריטית הראשונה שלהם — יחס אורך צירי לקוטר מעל בערך 0.5 מחייב בדרך כלל איזון בשני מישורים. רוטור שפועל בסמוך למהירות קריטית או מעליה חייב תחילה להיבדק כרוטור גמיש לפי ISO 21940-12: ייתכן שיידרש איזון במספר מהירויות וביותר משני מישורים, ולכן איזון רגיל של רוטור קשיח בשני מישורים עלול שלא להספיק. חוסר האיזון השיורי המותר לכל מישור מחושב כך:
Uלְכָל (g·mm) = eלְכָל × m / 2, כאשר eלְכָל = G × 9549 / n (mm/s × rpm → μm eccentricity), m היא מסת הרוטור ב-kg, והגורם 2 מחלק את הסבילות באופן שווה בין שני המישורים. שימו לב שהחלוקה השווה היא קירוב מעשי עבור רוטורים סימטריים בקירוב עם מישורי תיקון ליד המסבים — ולא כלל הקצאה אוניברסלי של ISO; ISO 21940-11 מקצה את הסבילות באופן שונה עבור סידורים לא סימטריים של מישורים ומסבים.
בדרך כלל מאזנים את הרוטורים של המאווררים כדי G6.3 או G2.5 לְכָל ISO 14694; צירים למכונות עיבוד מדויקות וציוד טורבו במהירות גבוהה G1.0 או עדין יותר. השתמש ב- מחשבון חוסר איזון שיורי כדי לברר את טווח הסטייה המותר עבור דרגת ה-G, מסת הרוטור ומהירות הפעולה שלך לפני תחילת העבודה.
ה-Balanset-1A — ערכת האיזון המלאה לשטח
איזון דינמי דו-מישורי של כל רוטור קשיח — מאווררים, תופים, צירים, מכלולי משאבות רב-שלביות — מתבצע באמצעות מכשיר נייד אחד: ה- Balanset-1A. זהו מאזן דינמי ומנתח רעידות דו-ערוצי המשמש לאיזון רוטורים במצב ניוטרל, במהירות תפעול, תוך שימוש בשיטת מקדם ההשפעה — מישור אחד בשלושה מחזורים, שני מישורים בארבעה. התוכנה מחשבת את המסה והזווית המדויקות לתיקון עבור שני המישורים ושומרת דוח.

מה כלול בערכה המלאה
€1,975 · ערכה מלאה, במלאי, חשבונית עם מע"מ
- יחידת מדידה לממשק (USB, 2 ערוצים)
- שני מדי תאוצה לרטט (כבל 4 m, אופציונלי 10 m)
- מד-סל"ד לייזר / חיישן פאזה אופטי (50–500 mm)
- מעמד מגנטי לחיישן
- מאזניים דיגיטליים למשקולות ניסוי & תיקון
- תוכנת איזון & ניתוח ל-Windows
- מארז נשיאה מפלסטיק
ערכה מלאה
יחידה · 2 חיישנים · מד סיבובים לייזר · מעמד מגנטי · משקל דיגיטלי · תוכנה · תיק נשיאה. כל מה שצריך כדי להתחיל באיזון מיד עם הוצאת המוצר מהאריזה.
ערכת יצרן מקורי
יחידה · 2 חיישנים · מד מהירות לייזר · תוכנה. מיועד למתקינים שכבר מחזיקים במעמד, במשקל ובמארז, או המשלבים את היחידה במכונת איזון.
| פָּרָמֶטֶר | ערך |
|---|---|
| ערוצי מדידה | 2 (איזון חד-מישורי & דו-מישורי) |
| טווח מהירות הרטט | 0.2–80 mm/s RMS |
| טווח תדרים | 5–1000 Hz (≤10% שגיאת אמפליטודה מעל 550 Hz) |
| דיוק המדידה | ±5% מהסקלה המלאה |
| שיטה | מקדם השפעה ל-3 סיבובים (1 או 2 מישורים) |
| ניתוח | משרעת & פאזה ב-1×, ספקטרום FFT & צורת גל, דוחות שמורים |
| מחשב נייד | לא כלול (מחשב Windows, ניתן להזמין בנפרד) |
מקרים אמיתיים של איזון דו-מישורי


איזון דו-מישורי — מהשטח
הגדרת מקדם ההשפעה
שני חיישנים ומד מהירות לייזר אחד הממוקמים כך שיוכלו לאפיין את שני מישורי התיקון בו-זמנית.
מאוזן במקומו
הרוטור נשאר בתוך המסבים שלו ומתוקן בזמן פעולתו — אין צורך להוציאו.
שני המישורים נפתרו
מסת התיקון והזווית מחושבות עבור מישור 1 ומישור 2 בו-זמנית, בפעולה אחת.
תוצאה מאומתת
הריצה הסופית מאשרת שחוסר האיזון השיורי נמצא בתוך סבילות ISO 21940-11 בשני המישורים.
מחשבונים חינמיים לאיזון דו-מישורי
שאלות נפוצות בנושא איזון דו-מישורי
מתי איזון במישור אחד מספיק?
כיצד פועלת שיטת מקדם ההשפעה עבור שני מישורים?
כמה סבבי מדידה נדרשים לביצוע עבודה דו-מישורית?
האם עלי להסיר את הרוטור מהמכונה?
לאיזו דרגת איכות איזון עליי לשאוף עבור הרוטור שלי?
האם צוות התחזוקה שלנו יכול לבצע איזון דו-מישורי באמצעות ה-Balanset-1A?
למד את התיאוריה
פתרו את שני המישורים בביקור אחד — במהירות פעולה, ללא פירוק
ה-Balanset-1A מלווה אתכם לאורך כל תהליך מדידת מקדמי ההשפעה הדו-מישורי: קו בסיס, בדיקת מישור 1, בדיקת מישור 2, תיקון ואימות — והכל במהירות פעולה, בתוך המסבים של הרוטור עצמו. תיעוד חוסר האיזון השיורי בהתאם לתקנים ISO 21940-11, ISO 14694 ו-API 610. מוכן למשלוח.