خدمات بالانس › تعادلیابی دوصفحهای (دینامیکی)
تعادلیابی دوصفحهای (دینامیکی) — روش، فیزیک و فرآیند مزرعهای
وقتی روتور به اندازهای بزرگ است که عدم تعادل در هر انتهای آن متفاوت باشد، یک صفحه تصحیح منفرد کافی نیست. تعادلیابی دوصفحهای دینامیکی هم اجزای ایستا و هم اجزای کوپل را بهطور همزمان تصحیح میکند — با استفاده از روش ضریبهای تأثیر — بهطوری که روتور در تمام طول خود نرمتر کار کند، نه فقط در مرکز آن.
خلاصه: تعادلیابی دوصفحهای (دینامیکی) در هر زمانی که روتور هم عدم تعادل ایستا و هم جزء کوپل را داشته باشد، ضروری است — بهمعنای آن که عدم تعادل در طول محور شافت توزیع شده است تا اینکه در یک دیسک متمرکز باشد. یک سنسور ارتعاش در هر کاسینگ یاتاقان و یک تاکومتر لیزری روی شافت برای اندازهگیری واکنش روتور به وزنهای آزمایشی قرار گذاشته شده در هر صفحه به نوبت استفاده میشوند؛ سپس Balanset-1A جرم تصحیح دقیق و زاویه را در هر دو صفحه بهطور همزمان حل میکند. نیازی به برداشتن از ماشین نیست — تمام فرآیند چهاربار در سرعت کاری، در یاتاقانهای خود روتور، در کمتر از یک ساعت برای اکثر روتورها انجام میشود.
علائمی که روتور شما به تعادلیابی دوصفحهای نیاز دارد
یک تصحیح تکصفحهای میتواند یک یاتاقان را ساکت کند در حالیکه دیگری هنوز لرزش میکند. اگر هر یک از این الگوها را ببینید، درمان دوصفحهای پاسخ صحیح است:
تکصفحهای بر مقابل دوصفحهای: چه موقع به دو صفحه نیاز است؟
انتخاب بین یک و دو صفحه تصحیح به هندسه روتور و ماهیت عدم تعادل آن بستگی دارد. درک سه نوع عدم تعادل به شما کمک میکند فوراً تصمیم بگیرید.
سه نوع عدم تعادل
عدم تعادل استاتیک — مرکز جرم از محور چرخش دور است اما محور اینرسی اصلی موازی با آن است. یک صفحه تصحیح کافی است: جرمی بر روی سمت سنگین اضافه کنید و روتور متعادل است. روتورهای معمول: قرقرههای نازک، چرخهای سنگزنی باریک، دیسکهای فن تکصفحهای.
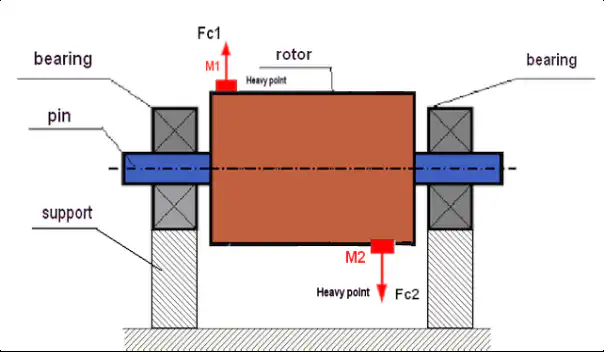
عدم تعادل کوپل — مرکز جرم بر روی محور است اما محور اینرسی اصلی متمایل است. روتور در حالیکه نوسان میکند متکی میشود. این نمیتواند در یک صفحه تصحیح شود؛ دو جرم برابر و مخالف 180° در دو صفحه جدا شده برای لغو لحظه تکیهگاه مورد نیاز است. روتورهای معمول: درامهای استوانهای بلند، آرمیچرهای موتور، مجموعههای شافت.
عدم تعادل دینامیکی (ترکیبی) — مورد عمومی: هر دو مؤلفههای ایستایی و زوج حاضر هستند. تصحیح نیازمند دو صفحهای است که بهطور دلخواه در طول شافت انتخاب شدهاند. تمام روتورهای تولیدی واقعی در این دسته قرار میگیرند.
| عامل | تکصفحهای (ایستایی) | دوصفحهای (دینامیکی) |
|---|---|---|
| شکل روتور | دیسک نازک؛ عرض محوری بسیار کمتر از قطر | روتور عریض؛ عرض محوری قابلمقایسه یا بزرگتر از قطر |
| نوع نابالانسی | عدم تعادل ایستایی خالص | عدم تعادل جفتی یا ترکیبی (دینامیکی) |
| نسبت L/D (طول محوری / قطر) | L/D < 0.5 (تقریبی) | L/D ≥ 0.5 (روتور صلبی که زیر اولین سرعت بحرانی خود کار میکند). نزدیک یا بالاتر از سرعت بحرانی، ابتدا روتور را بهعنوان روتور انعطافپذیر ارزیابی کنید (ISO 21940-12) — بالانس دوصفحهای بهتنهایی ممکن است کافی نباشد |
| تعداد حسگرها | 1 حسگر ارتعاش + 1 تاکومتر لیزری | 2 حسگر ارتعاش + 1 تاکومتر لیزری |
| تعداد اجرای اندازهگیری | 3 اجرا (اولیه + آزمایشی + اصلاح) | 4 اجرا (اولیه + آزمایشی صفحه 1 + آزمایشی صفحه 2 + اصلاح) |
| صفحات اصلاح | 1 | 2 |
| تجهیزات معمول | پروانههای باریک، ریلی، دیسکهای یکمرحلهای | درامها، شافتهای محرک، پروانههای پهن، روتورهای چندمرحلهای، روتورهای الکتروموتور |
| مرجع استاندارد | ISO 21940-11 (روتور سفت یکصفحه) | ISO 21940-11 (روتور سفت دوصفحه) |
قاعده کلی: اگر ارتعاش روتور اندازهگیریشده در یک بلبرینگ در جهت مخالف ارتعاش در بلبرینگ دیگر تغییر کند، هنگامی که جرم آزمایشی را جابهجا میکنید، یعنی عنصر جفتی وجود دارد و دو صفحه مورد نیاز است.
چرا روتورهای پهن تعادل دینامیکی را از دست میدهند — و هزینه آن چقدر است
هنگام تولید یا تعمیر روتور، جرم بهندرت بهطور متقارن در امتداد محور توزیع میشود. خوردگی یک سر پروانه را سریعتر از سر دیگر میخورد؛ تعمیرات جوشکاری ماده را در یک ایستگاه محوری اضافه میکند؛ تجمع محصول بهطور نامنظمی در امتداد درام جمع میشود. نتیجه نهتنها عدم تعادل ایستایی بلکه یک زوج عنصری است که یک گشتاور تابناپذیری ایجاد میکند. تنها اصلاح همزمان در دو صفحه هر دو را حذف میکند. چون نیروی گریز از مرکز با مربع سرعت چرخش افزایش مییابد، عدم تعادل جفتی متوسط در 500 RPM در 3,000 RPM به یک نیروی مخرب تبدیل میشود.
نادیده گرفتن مؤلفه کوپل به معنای حمل بار دینامیکی مرتفع توسط هر دو یاتاقان در هر دوران است. خستگی یاتاقان انباشته میشود، درزگیرها شکست میخورند، بستها شل میشوند، و ترکهای ساختاری از پای نصب به سمت بیرون انتشار مییابند. تلفات اقتصادی — یاتاقانها، درزگیرها، تولید از دست رفته، هزینههای اضطراری — معمولاً هزینه کار متوازنسازی دو صفحه درست را چندین برابر از آن تجاوز میکند.
چرا نصف کردن ارتعاش، عمر یاتاقان را چند برابر میکند؟
متوازنسازی دو صفحه — روش سرانجامپذیری صحرایی گام به گام
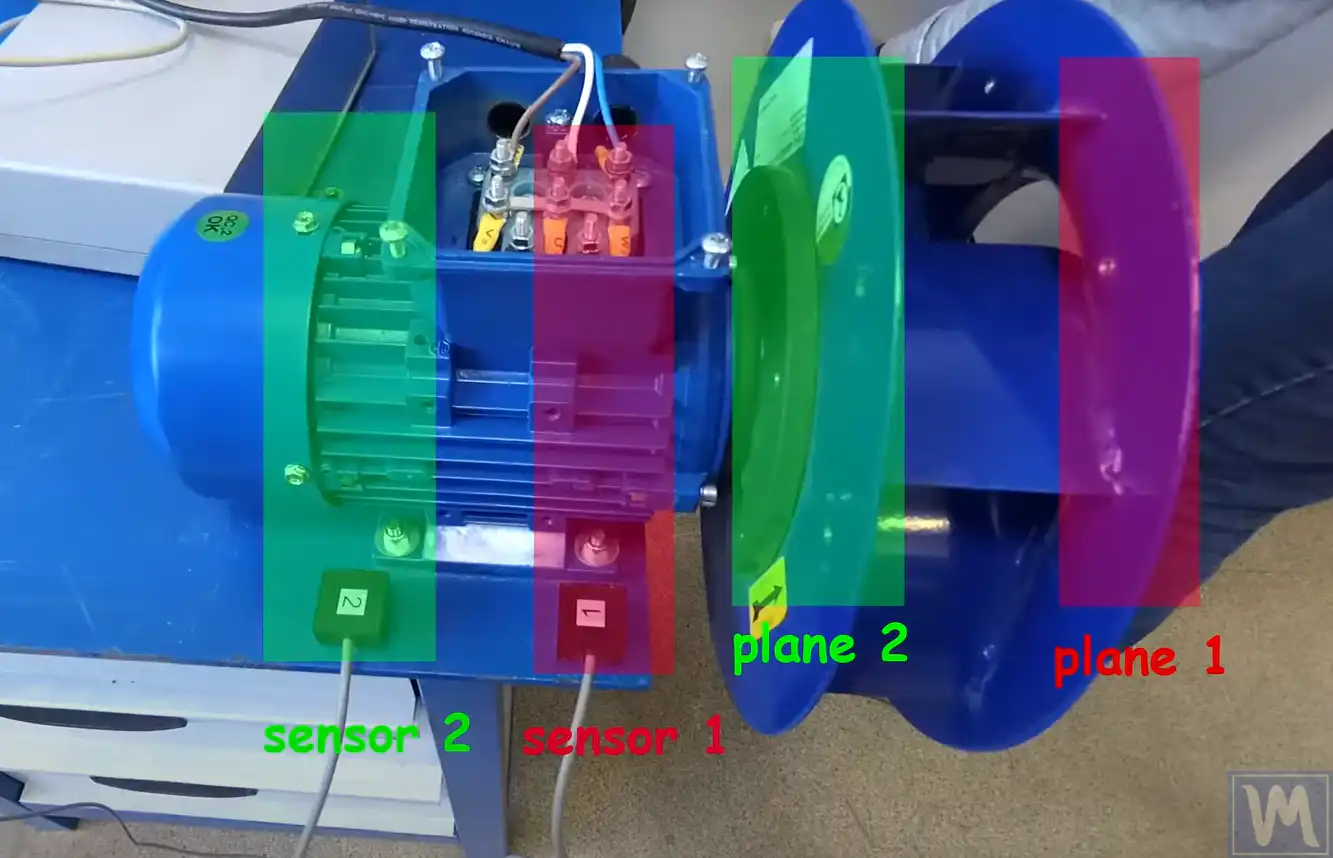
Balanset-1A روش ضریب تأثیر را بهکار میبرد. دو حسگر لرزش و یک تاخوجه لیزری روتور را بهطور کامل مشخص میکنند و هر دو صفحه تصحیح را در یک جلسه صحرایی حل میکنند:
- سنسورها را نصب کنید. یک شتابسنج لرزش را روی هر پوسته یاتاقان ثابت کنید (صفحات 1 و 2) و تاخوجه لیزری را به سمت نوار بازتابدهنده روی میل بدل کنید. هیچ جدایی لازم نیست — روتور در طول روش تحت شرایط کاری عادی اجرا میشود.
- خط مبنا را اندازه بگیرید. یک اجرای تک بر سرعت تمام عملکرد دامنه لرزش و زاویه فاز را بهطور همزمان در هر دو مکان یاتاقان ثبت میکند، و بردارهای 1× RPM ابتدائی را فراهم میکند که حالت عدم تعادل اولیه را در هر دو صفحه تعریف میکند.
- وزن آزمایشی را در صفحه 1 اضافه کنید. جرم معلوم در موضع زاویهای مشخصشدهای در صفحه تصحیح اول محکم میشود. اجرای دوم نحوه تأثیر این وزن بر لرزش را ثبت میکند هر دو مکانهای یاتاقان، دو مورد از چهار ضریب تأثیر را بهدست میدهند.
- وزن آزمایشی را به صفحه 2 منتقل کنید. همان جرم به صفحه تصحیح دوم جابهجا میشود و اجرای دیگری تأثیر متقابل را روی هر دو حسگر ثبت میکند. دستگاه اکنون تمام چهار ضریب تأثیر لازم برای سیستم 2×2 را دارد.
- بگذار دستگاه محاسبه کند. Balanset-1A معادلات ضریب تأثیر دو صفحه را حل میکند و جرم تصحیح دقیق و موضع زاویهای را برای هر صفحه بهطور همزمان صادر میکند — هیچ محاسبه دستی لازم نیست.
- تصحیحها را نصب کنید و تأیید کنید. وزنههای تصحیح در موضعهای محاسبهشده روی هر دو صفحه قرار داده میشوند. اجرای نهایی تأیید میکند که عدم تعادل باقیمانده در تحمل ISO 21940-11 برای G-درجه مشخصشده قرار دارد و Balanset-1A گزارش متوازنسازی اسناد را ذخیره میکند.
آنچه ما در دو صفحه متوازن میکنیم
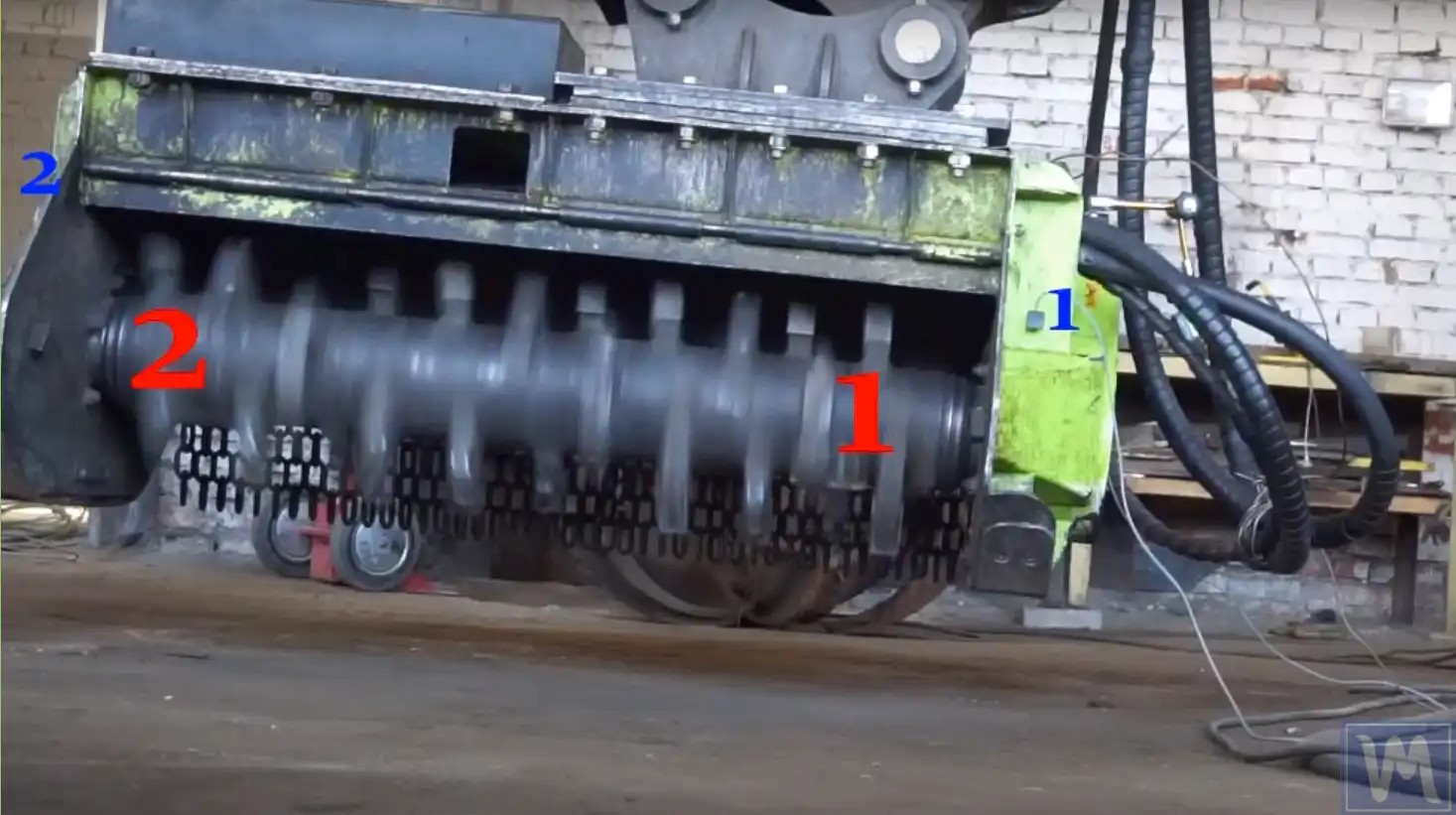
- پروانههای بادی گریزمرکز عریض و دمندههای دوورودی
- درامهای خردکاری و خردکنی دروماشین ترکیبی
- میلگاردانها و شفتهای کاردان
- روتورهای پمپ چندمرحلهای و پشتههای چرخاندهی کمپرسور
- غلطکهای ماشین کاغذ و استوانههای چاپ و روپوشش
- پیچهای نقلوانتقال و متعاقبهای بیشتر از حدود ۵۰۰ میلیمتر
- روتورهای موتور و روتورهای ژنراتور با طول محوری قابلتوجه
- روتورهای توربوشارژر و روتورهای توربین بخار (تأیید ارتعاش در محل)
- هر روتوری که اصلاح تکصفحهای یکی از بلبرینگها را همچنان لرزان رها کند
تolerances & standards
ISO 21940-11 (قبلاً ISO 1940-1) گریدهای کیفیت بالانس G0.4 تا G4000 را برای روتورهای صلب تعریف میکند. برای روتورهای صلب — یعنی روتورهایی که بسیار پایینتر از اولین سرعت بحرانی خود کار میکنند — نسبت طول محوری به قطرِ بیش از حدود 0.5 معمولاً نیاز به بالانس دوصفحهای دارد. روتوری که نزدیک یا بالاتر از سرعت بحرانی کار میکند ابتدا باید مطابق ISO 21940-12: ممکن است به بالانس در چندین سرعت و در بیش از دو صفحه نیاز داشته باشد، بنابراین بالانس معمولی دوصفحهای روتور صلب میتواند ناکافی باشد. نامیزانی باقیمانده مجاز در هر صفحه بهصورت زیر محاسبه میشود:
Uبه ازای هر (g·mm) = eبه ازای هر × m / 2, که eبه ازای هر = G × 9549 / n (mm/s × rpm → μm eccentricity)، m جرم روتور بر حسب kg است، و ضریب 2 تلرانس را بهطور مساوی بین دو صفحه تقسیم میکند. توجه داشته باشید که این تقسیم مساوی یک تقریب عملی برای روتورهای تقریباً متقارن با صفحات اصلاح نزدیک یاتاقانها است — نه یک قاعده تخصیص عمومی ISO؛ ISO 21940-11 برای آرایشهای نامتقارن صفحات و یاتاقانها تلرانس را بهگونهای متفاوت تخصیص میدهد.
روتورهای فن عموماً بهصورتی تعادل داده میشوند جی۶.۳ یا جی ۲.۵ به ازای هر ایزو ۱۴۶۹۴؛ دوکهای دقیق دستگاههای ماشینکاری و تجهیزات توربو سرعتبالا هدف دارند G1.0 یا بهتر. از محاسبهی عدم تعادل باقیمانده برای یافتن تلرانس مجاز برای درجه G، جرم روتور و سرعت سرویس خود قبل از شروع کار استفاده کنید.
Balanset-1A — کیت کامل بالانس در محل شما
تعادل دینامیکی دوصفحهای هر روتور صلب — فنها، درامها، میلهای راهنمایی، مجموعههای پمپ چندمرحلهای — با یک ابزار قابل حمل انجام میشود: Balanset-1A. این یک متعادلکننده دینامیکی دوکاناله و تحلیلگر ارتعاش است که روتورها را متعادل میکند در یاتاقانهای خود، در سرعت عملیاتی، با استفاده از روش ضریب تأثیر — یک صفحه در سه اجرا، دو صفحه در چهار اجرا. نرمافزار جرم تصحیح دقیق و زاویه را برای هر دو صفحه محاسبه میکند و گزارشی ذخیره میکند.

محتویات کیت کامل
€1,975 · کیت کامل، موجود، فاکتور با مالیات بر ارزش افزوده
- واحد اندازهگیری رابط (USB، ۲ کانال)
- دو شتابسنج ارتعاش (کابل 4 m، 10 m اختیاری)
- تاکومتر لیزری / حسگر فاز نوری (50–500 mm)
- پایهٔ مغناطیسی برای حسگر
- ترازو دیجیتال برای وزنهای آزمایشی و اصلاحی
- نرمافزار بالانسینگ و تحلیل ویندوز
- جعبه حمل پلاستیکی
کیت کامل
واحد · ۲ حسگر · تاکوگراف لیزری · پایهٔ مغناطیسی · ترازو دیجیتال · نرمافزار · کیف حمل. همهٔ آنچه برای شروع بالانس کردن لازم است، مستقیماً از جعبه در دسترس است.
مجموعه OEM
واحد · ۲ حسگر · تاکوگراف لیزری · نرمافزار. برای یکپارچهسازانی که از قبل پایه، ترازو و محفظه دارند یا واحد را در دستگاه ترازسازی تعبیه میکنند.
| پارامتر | مقدار |
|---|---|
| کانالهای اندازهگیری | ۲ (تعادلیابی تکصفحهای و دوصفحهای) |
| محدوده سرعت ارتعاش | 0.2–80 mm/s RMS |
| محدوده فرکانس | 5–1000 Hz (≤10% amplitude error above 550 Hz) |
| دقت اندازهگیری | ±5% از مقیاس کامل |
| روش | ضریب تأثیر ۳-دورهای (یک یا دو صفحه) |
| تحلیل | دامنه و فاز در 1×، طیف FFT و شکل موج، گزارشهای ذخیره شده |
| لپتاپ | شامل نمیشود (رایانهٔ ویندوزی، در صورت درخواست موجود است) |
موارد واقعی تعادل دوصفحهای


تعادل دوسطحی — از سایت
راهاندازی روش ضرایب تأثیر
دو سنسور و یک تاکومتر لیزری برای مشخصسازی هر دو صفحۀ تصحیح بهطور همزمان.
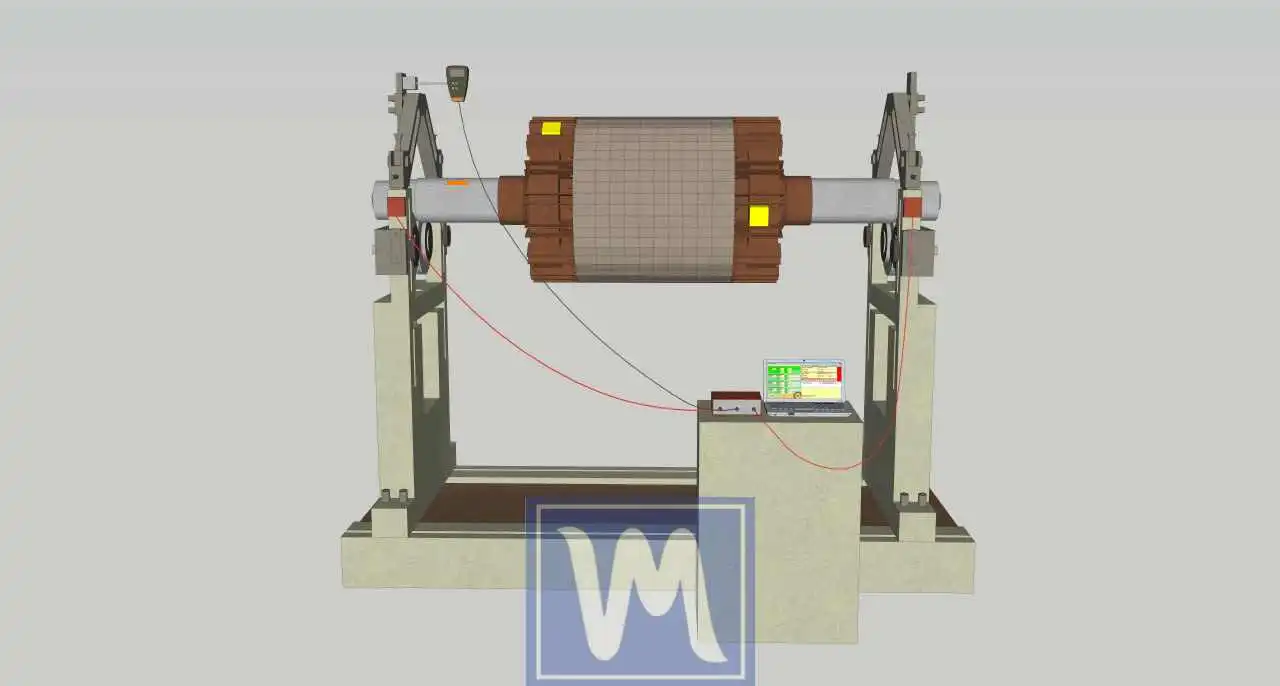
متعادلشدن در جای خود
روتور در بلبرینگهای خود باقی میماند و با سرعت کاری تصحیح میشود — نیازی به برداشتن نیست.
هر دو صفحه حلشده
جرم تصحیح و زاویه برای صفحۀ 1 و صفحۀ 2 بهطور همزمان در یک جلسه محاسبه میشود.
نتیجۀ تأییدشده
اجرای نهایی تعادلبخشی باقیمانده را در هر دو صفحه در محدودۀ تحمل ISO 21940-11 تأیید میکند.
ماشینحسابهای رایگان برای تعادل دوسطحی
پرسشهای متداول تعادل دوسطحی
تعادل تکسطحی چه زمانی کافی است؟
روش ضرایب تأثیر برای دو صفحه چگونه کار میکند؟
کار تعادل دوسطحی چند اجرای اندازهگیری لازم دارد؟
آیا باید روتور را از دستگاه برداشت؟
کدام گروه کیفیت تعادل برای روتور من هدف قرار دهم؟
آیا تیم نگهداری ما میتواند متعادلسازی دو صفحه را با Balanset-1A انجام دهد؟
نظریه را بیاموزید
هر دو صفحه را در یک ویزیت حل کنید — در سرعت کاری، بدون جداسازی
Balanset-1A شما را از کل روش ضریبتأثیر دو صفحه راهنمایی میکند: خطپایه، آزمایش صفحه 1، آزمایش صفحه 2، تصحیح و تأیید — همه در سرعت کاری، در بلبرینگهای خود روتور. عدمتعادل باقیمانده مستندشده طبق ISO 21940-11، ISO 14694 و API 610. آماده برای ارسال.