Tasakaalustamisteenused › Kahepoolne (dünaamiline) tasakaalustamine
Kahetasandiline (dünaamiline) tasakaalustamine — meetod, füüsika ja välimenetlus
Kui rootor on piisavalt lai, et tasakaalustamatus erineb mõlemas otsas, ei piisa ühest korrektsioontasandist. Kahetasandiline dünaamiline tasakaalustamine korrigeerib nii staatilise kui ka paarikomponendi samaaegselt — kasutades mõjukoefitsientide meetod — nii et rootor töötab sujuvalt kogu pikkuses, mitte ainult keskel.
Lühidalt: Kahetasandiline (dünaamiline) tasakaalustamine on vajalik alati, kui rootor kannab nii staatilist tasakaalustamatust kui ka paarikomponenti — see tähendab, et tasakaalustamatus on jaotunud mööda võlli telge, mitte koondunud ühe ketta kohale. Vibratsiooniandur iga laagrikoja juures ja lasertahomeetril võllil kasutatakse rootori reaktsiooni mõõtmiseks katsemasside suhtes, mis asetatakse kordamööda mõlemasse tasandisse; seejärel arvutab Balanset-1A täpse korrektsioonimassi ja nurga mõlemas tasandis üheaegselt. Masinast eemaldamine ei ole vajalik — kogu nelja-mõõtmisega menetlus sooritatakse tööl kiirusel, rootori omalagrites, enamiku rotorite puhul alla ühe tunni.
Märgid, et teie rootor vajab kahetasandilist tasakaalustamist
Üheastmeline korrektsioon võib vaigistada ühe laagri, samal ajal kui teine endiselt väriseb. Kui näete mõnda neist mustritest, on kahetasandiline tasakaalustamine õige lahendus:
Ühel tasandil vs kahel tasandil tasakaalustamine: millal on vaja kahte tasandit?
Valik ühe ja kahe korrektsionitasandi vahel sõltub rootori geomeetriast ning selle tasakaalunihke iseloomust. Kolme tasakaalunihke liigi mõistmine aitab otsuse koheselt teha.
Kolm tasakaalunihke liiki
Staatiline tasakaalustamatus — massikese asub väljaspool pöörlemistelge, kuid peainertsiatelg on sellega paralleelne. Ühest korrektsionitasandist piisab: lisage mass raskemale küljele ja rootor on tasakaalus. Tüüpilised rotorid: õhukesed rihmarattad, kitsad lihimiskettad, ühetasandilised ventilaatorikettad.
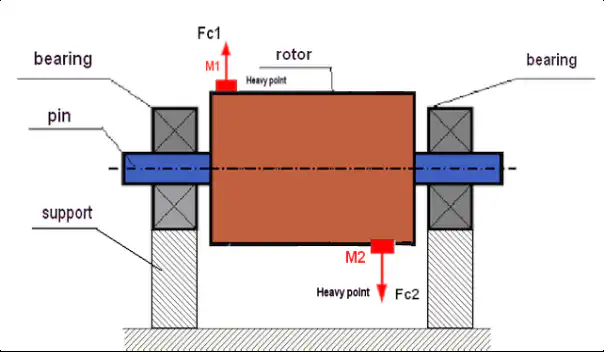
Paaristasakaalustamatus — massikese asub teljel, kuid peainertsiatelg on kallutatud. Rootor kiigub, mitte ei vibreerise. Seda ei saa korrigeerida ühel tasandil; kiigatava momendi tühistamiseks on vaja kahte võrdset ja vastassuunalist massi, mis asuvad 180° kaugusel üksteisest kahes eraldatud tasandis. Tüüpilised rotorid: pikad silindrilised trummlid, mootoriankrud, võllisõlmed.
Dünaamiline (kombineeritud) tasakaalunihge — üldine juhtum: esineb nii staatiline kui ka paarikomponent. Korrektsiooni jaoks on vaja kahte tetsuvalikult valitud tasandit mööda võlli. Kõik tegelikud tootmisrotorid kuuluvad sellesse kategooriasse.
| Tegur | Ühepoolne (staatiline) | Kahetasandiline (dünaamiline) |
|---|---|---|
| Rootori kuju | Õhuke kettaratas; aksiaallaius palju väiksem kui läbimõõt | Lai rootor; telgsuunaline laius võrdub läbimõõduga või ületab seda |
| Tasakaalustamata massi tüüp | Ainult staatiline tasakaalutus | Paari- või kombineeritud (dünaamiline) tasakaalunihge |
| L/D suhe (telgsuunaline pikkus / läbimõõt) | L/D < 0,5 (ligikaudu) | L/D ≥ 0.5 (rigid rootor running below its first critical speed). Near or above a critical speed, evaluate the rootor as flexible first (ISO 21940-12) — kahetasandiline balancing alone may be insufficient |
| Sensorite arv | 1 vibratsioonisensor + 1 lasertahhomeeter | 2 vibratsioonisensorit + 1 lasertahhomeeter |
| Mõõtmisjooksude arv | 3 jooksu (lähtealus + test + korrigeerimine) | 4 jooksu (lähtealus + tasand-1 test + tasand-2 test + korrigeerimine) |
| Korrektsioonitasandid | 1 | 2 |
| Tüüpilised seadmed | Kitsad tiivikud, rihmarattad, üheastmelised kettad | Trummid, juhtakselid, laiud tiivikud, mitmeastmelised rootoritid, mootorirotoritid |
| Standardviide | ISO 21940-11 (1-tasandi jäik rotor) | ISO 21940-11 (2-tasandi jäik rotor) |
Rusikareegel: kui katsekaalu liigutamisel muutub ühel laagril mõõdetud rootori vibratsioon vastassuunas teise laagri vibratsiooniga võrreldes, on teil paarikomponent olemas ning vaja on kahte tasandit.
Miks laiad rotorid kaotavad dünaamilise tasakaalu — ja mida see maksab
Kui rootor valmistatakse või remondितakse, jaotub mass harva sümmeetriliselt mööda selle telge. Erosioon kulutab tiivikulaba ühte otsa kiiremini kui teist; keevitusparandused lisavad materjali ühel telgsuunalisel positsioonil; tootelisandid kogunevad trummlil ebaühtlaselt. Tulemuseks ei ole mitte ainult staatiline tasakaalunihge, vaid ka paar komponent, mis tekitab kiigutava momendi. Ainult samaaegne korrektsioon kahes tasandis elimineerib mõlemad. Kuna tsentrifugaaljõud kasvab ruut pöörlemiskiiruse ruuduga, muutub mõõdukas paari tasakaalunihge 500 RPM juures hävitavaks jõuks 3 000 RPM juures.
Paarikomponendi ignoreerimine tähendab, et mõlemad laagrid kannavad iga pöörde jooksul suurenenud dünaamilisi koormusi. Laagriväsimus kuhjub, tihendid purunevad, kinnitusdetailid loosuvad ja struktuuripraod levivad kinnitusjaladest väljapoole. Majanduslikud kahjud — laagrid, tihendid, tootmiskaotus, erakorraline tööjõud — ületavad tavaliselt korraliku kahetasandilise töö maksumuse mitmekordselt.
Miks vibratsiooni vähendamine poole võrra pikendab laagrite kasutusiga
2-tasandi tasakaalustamine — samm-sammuline välimenetlus
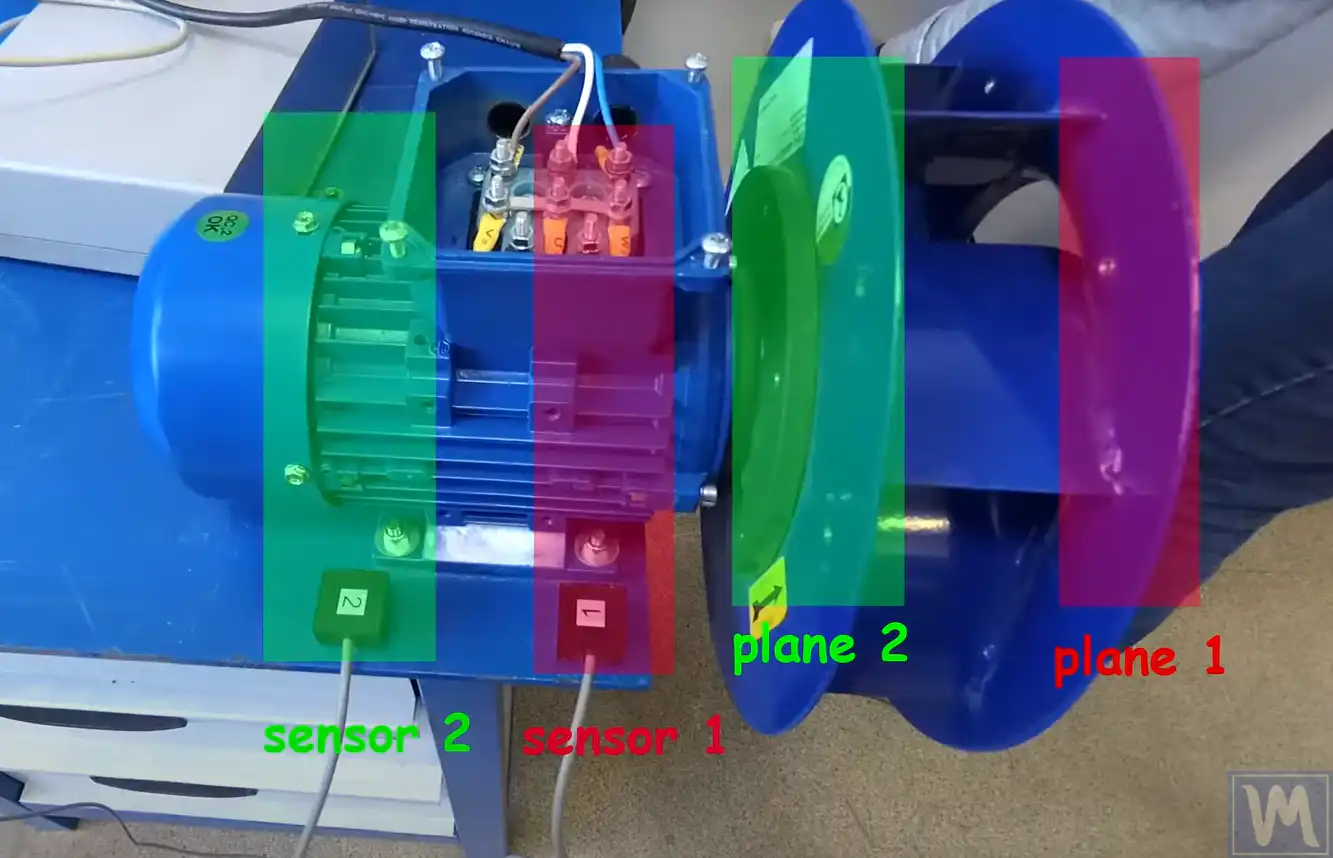
Balanset-1A kasutab mõjukoefitsientide meetodit. Kaks vibratsiooniandurit ja üks lasertahomeetер iseloomustavad rootori täielikult ning lahendavad mõlema korrektsionitasandi ühe kohapealse seansi jooksul:
- Paigaldage andurid. Kinnitage vibratsioonikiirendusandur mõlemale laagrimajale (tasandid 1 ja 2) ning suunake lasertahomeetri kiir võlli peegeldavale ribale. Lahtivõtmine ei ole vajalik — rootor töötab kogu protseduuri vältel tavalistes tööoludes.
- Mõõtke lähtejoon. Üks käivitustsükkel täiskiirusel salvestab samaaegselt mõlemas laagripunktis vibratsiooni amplituudi ja faasinurga, andes algsed 1× RPM vektorid, mis määratlevad mõlema tasandi esialgse tasakaalustamatus-seisundi.
- Lisage proovimass tasandile 1. Teadaoleva massiga raskus kinnitatakse esimese korrektsioontasandi märgistatud nurkasuunasse. Teine käivitustsükkel salvestab, kuidas see raskus mõjutab vibratsiooni mõlemad laagripunktides, andes kaks neljast mõjukoefitsiendist.
- Viige proovimass tasandile 2. Sama mass paigutatakse ümber teisele korrektsioontasandile ning järgmine käivitustsükkel salvestab ristmõju mõlemale andurile. Seade omab nüüd kõiki nelja mõjukoefitsienti, mis on vajalikud 2×2 süsteemi jaoks.
- Laske seadmel arvutada. Balanset-1A lahendab kahetasandilise mõjukoefitsientide süsteemi võrrandid ning väljastab samaaegselt täpse korrektuurmassi ja nurkasuuna mõlema tasandi jaoks — käsitsi arvutusi ei ole vaja.
- Paigaldage parandused ja kontrollige. Korrektuurmassid paigaldatakse arvutatud asukohtadesse mõlemal tasandil. Lõplik käivitustsükkel kinnitab, et jääktasakaalustamatus jääb ISO 21940-11 lubatu piiridesse ettenähtud G-klassi jaoks, ning Balanset-1A salvestab dokumenteeritud tasakaalustamisprotokolli.
Mida me kahetasandiliselt tasakaalustame
- Laiad tsentrifugaalventilaatori tiivikud ja kahepoolse sissevooluga puhurid
- Kombainide peksumis- ja hakktrummlid
- Ajamivõllid ja kardaanvõllid
- Mitmeastmeliste pumpade rootorsüsteemid ja kompressorite tiivikupakid
- Paberimašinavaltsid ja trüki-/kaetussilindrid
- Kruvikongveierid ja transportkruvid, mille pikkus on üle ~500 mm
- Mootori rootorsüsteemid ja generaatorirootorsüsteemid olulise teljesuunalise pikkusega
- Turbolaaduri rootorsüsteemid ja auruturbiini rootorsüsteemid (välitingimustes vibratsiooni kontrollimiseks)
- Iga rotor, kus ühe tasandi parandus jätab ühe laagri veel vibreerima
Tolerantsid ja standardid
ISO 21940-11 (endine ISO 1940-1) defines balance quality grades G0.4 through G4000 for rigid rootors. For rigid rootors — those operating well below their first critical speed — an axial-length-to-diameter ratio above roughly 0.5 usually calls for kahetasandiline balancing. A rootor that operates near or above a critical speed must first be evaluated as a flexible rootor per ISO 21940-12: it may need balancing at several speeds and in more than two planes, so ordinary kahetasandiline rigid-rootori tasakaalustamine can be insufficient. The permissible residual tasakaalustamatus per plane is calculated as:
Uiga (g·mm) = eiga × m / 2, kus eiga = G × 9549 / n (mm/s × rpm → μm eccentricity), m is the rootor mass in kg, and the factor 2 splits the tolerance equally between the two planes. Note that the equal split is a practical approximation for roughly symmetric rootors with korrektsioonitasands near the laagers — not a universal ISO allocation rule; ISO 21940-11 allocates the tolerance differently for asymmetric plane and laager arrangements.
Ventilaatorirootoreid tasakaalustatakse tavaliselt G6.3 või G2.5 iga ISO 14694; täppistööpinkide spindlid ja kõrgkiirusega turboagregaadid sihivad G1.0 või täpsemalt. Kasutage meie jääkide tasakaalustamatuse kalkulaator et leida lubatav tolerants oma G-klassi, rootori massi ja tööpöörlemiskiiruse jaoks enne töö alustamist.
Balanset-1A - teie täielik väljatasakaalustuskomplekt
Iga jäiga rootori kahetasandiline dünaamiline tasakaalustamine — ventilaatorid, trummelid, kardaanvõllid, mitmeastmelised pumpade koostud — tehakse ühe kaasaskantava seadmega: Balanset-1A. See on kahekanalilise dünaamilise tasakaalustaja ja vibratsioonianalüsaator, mis tasakaalustab rootoreid oma laagrites, töökiirusel, kasutades mõjukoefitsientide meetodit — üks tasand kolme käivitusega, kaks tasandit nelja käivitusega. Tarkvara arvutab mõlema tasandi jaoks täpse korrektsioonimassi ja nurga ning salvestab aruande.

Mida sisaldab täielik komplekt
€1,975 - Täielik komplekt, laos, käibemaksuga arve
- Liides mõõtmisüksus (USB, 2 kanalit)
- Kaks vibratsioonikiirendusmõõturit (4 m kaabel, 10 m lisavarustus)
- Lasertakomeeter / optiline faasiandur (50-500 mm)
- Anduri magnetiline statiiv
- Digitaalne skaala katse- ja paranduskaalude jaoks
- Windowsi tasakaalustamise ja analüüsi tarkvara
- Plastist transpordikast
Täiskomplekt
Seade - 2 andurit - lasertakomeeter - magnetiline statiiv - digitaalne skaala - tarkvara - transpordikohver. Kõik vajalik tasakaalustamise alustamiseks karbist.
OEM-komplekt
Seade - 2 andurit - lasertakomeeter - tarkvara. Integraatoritele, kellel on juba statiiv, kaal ja korpus või kes integreerivad seadme tasakaalustusmasinasse.
| Parameeter | Väärtus |
|---|---|
| Mõõtekanalid | 2 (ühe- ja kahetasandiline tasakaalustamine) |
| Vibratsioonikiiruse vahemik | 0.2–80 mm/s RMS |
| Sagedusvahemik | 5–1000 Hz (≤10% amplituudiviga üle 550 Hz) |
| Mõõtetäpsus | ±5% täisskaalast |
| Meetod | 3-käiguline mõju-koefitsiendi meetod (1 või 2 tasapinda) |
| Analüüs | Amplituud ja faas 1×, FFT spekter ja lainekuju, salvestatud aruanded |
| Sülearvuti | Ei kuulu komplekti (Windows PC, saadaval soovi korral) |
Tegelikud 2-tasandi tasakaalustamise juhtumid

Kombaintrummel (2-tasandiline)
Mõlemad korrektsioonitasandid tasakaalustatud ühe väliistungi jooksul põllumajanduskombainil.
Kardaanvõll (2-tasandi)
Pika kardaanvõlli dünaamiline tasakaalustamine korrektsiooniraskusega mõlemal otsaäärmel.

Lai imelleri tiivaketta
Kahetasandiline korrektsioon laial tööstuslikul äravoolutõmburil, tasakaalustatud kohapeal.
Kahetasandiline tasakaalustamine — välisel
Mõju-koefitsiendi seadistamine
Kaks andurit ja üks lasertatšomeeter paigutatud mõlema korrektsioonitasandi samaaegseks iseloomustamiseks.
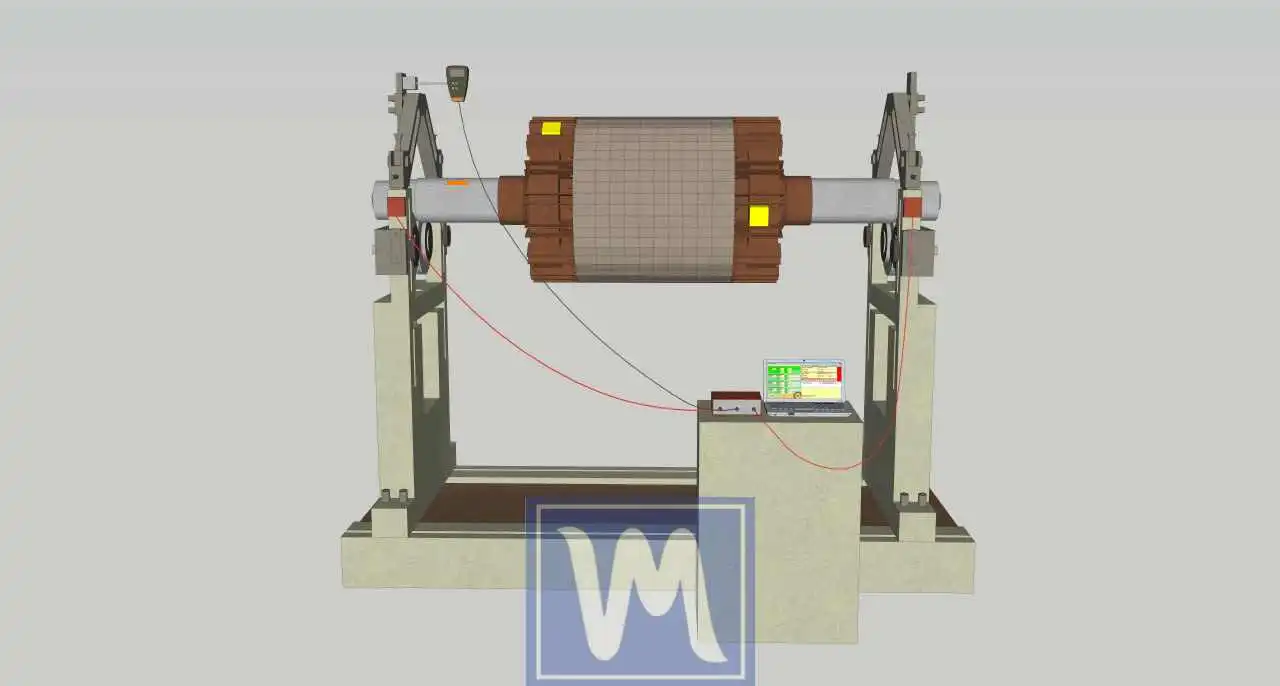
Tasakaalustatud paigal
Rotor jääb oma laagritesse ja korrigeeritakse tööpöörlemiskiirusel — eemaldamine ei ole vajalik.
Mõlemad tasandid lahendatud
Korrektsioonimass ja nurk arvutatakse tasandi 1 ja tasandi 2 jaoks samaaegselt ühe istungi jooksul.
Verificeeritud tulemus
Lõppkäivitus kinnitab jääktasakaalustamatuse vastavust ISO 21940-11 tolerantsile mõlemal tasandil.
Tasuta kalkulaatorid kahetasandiliseks tasakaalustamiseks
2-tasandi tasakaalustamise KKK
Millal piisab ühetasandilisest tasakaalustamisest?
Kuidas töötab mõjukoefitsientide meetod kahe tasandi puhul?
Mitu mõõtmisringi nõuab kahetasandiline töö?
Kas pean rootori masinast eemaldama?
Millist tasakaalustuse kvaliteediklassi peaksin oma rootori jaoks sihtima?
Kas meie hooldustiim saab Balanset-1A-ga kahetasandilist tasakaalustust teha?
Õppige teooriat
Lahendage mõlemad tasandid ühe külastusega — tööl oleval kiirusel, eemaldamata
Balanset-1A juhib teid läbi täieliku kahetasandilise mõjukoefitsiendi protseduuri: baas, tasandi 1 proovikaal, tasandi 2 proovikaal, korrektuur ja kontroll — kõik tööl oleval kiirusel, rootori oma laagrites. Dokumenteeritud jääktasakaalustamatusele vastavalt ISO 21940-11, ISO 14694 ja API 610 standarditele. Valmis saatmiseks.