บริการปรับสมดุล › การปรับสมดุลแบบสองระนาบ (ไดนามิก)
การปรับสมดุลแบบสองระนาบ (ไดนามิก) — วิธีการ, ฟิสิกส์ และขั้นตอนการปฏิบัติงานภาคสนาม
เมื่อโรเตอร์มีความกว้างมากพอที่ความไม่สมดุลจะแตกต่างกันในแต่ละปลาย การใช้ระนาบแก้ไขเพียงระนาบเดียวจะไม่เพียงพอ การปรับสมดุลแบบไดนามิกสองระนาบจะแก้ไขทั้งส่วนประกอบสถิตและส่วนประกอบแรงบิดพร้อมกัน — โดยใช้ วิธีสัมประสิทธิ์อิทธิพล — เพื่อให้โรเตอร์หมุนได้อย่างราบรื่นตลอดความยาวทั้งหมด ไม่ใช่เพียงแค่ตรงกลางเท่านั้น.
สรุป: การถ่วงสมดุลแบบสองระนาบ (ไดนามิก) จำเป็นเมื่อโรเตอร์มีทั้งความไม่สมดุลแบบสถิตและองค์ประกอบแบบคู่ควบ — หมายความว่าความไม่สมดุลกระจายตัวตามแนวแกนเพลาแทนที่จะกระจุกอยู่ที่จานเพียงแผ่นเดียว เซ็นเซอร์วัดการสั่นสะเทือนที่ตัวเรือนแบริ่งแต่ละด้านและเลเซอร์ทาโคมิเตอร์บนเพลาถูกใช้เพื่อวัดการตอบสนองของโรเตอร์ต่อน้ำหนักทดลองที่ติดตั้งในแต่ละระนาบตามลำดับ จากนั้น Balanset-1A จะคำนวณหามวลและมุมของน้ำหนักแก้ไขที่แน่นอนสำหรับทั้งสองระนาบพร้อมกัน โดยไม่ต้องถอดโรเตอร์ออกจากเครื่อง — ขั้นตอนทั้งสี่รอบทำเสร็จได้ที่ความเร็วใช้งานจริง ในแบริ่งของโรเตอร์เอง และสำหรับโรเตอร์ส่วนใหญ่ใช้เวลาน้อยกว่าหนึ่งชั่วโมง
สัญญาณที่บ่งบอกว่าโรเตอร์ของคุณต้องการการปรับสมดุลสองระนาบ
การแก้ไขแบบระนาบเดียวสามารถทำให้ตลับลูกปืนหนึ่งเงียบลงในขณะที่อีกตลับยังคงสั่นอยู่ หากคุณเห็นรูปแบบใดรูปแบบหนึ่งเหล่านี้ การแก้ไขแบบสองระนาบคือคำตอบที่ถูกต้อง:
แบบระนาบเดียว vs แบบสองระนาบ: เมื่อใดที่คุณจำเป็นต้องใช้สองระนาบ?
การเลือกใช้ระนาบการแก้ไขหนึ่งระนาบหรือสองระนาบขึ้นอยู่กับรูปทรงเรขาคณิตของโรเตอร์และลักษณะของความไม่สมดุลของมัน การเข้าใจความไม่สมดุลสามประเภทจะช่วยให้คุณตัดสินใจได้ทันที.
ประเภทของความไม่สมดุลทั้งสาม
ความไม่สมดุลแบบคงที่ — จุดศูนย์กลางมวลอยู่ห่างจากแกนหมุน แต่แกนความเฉื่อยหลักขนานกับแกนหมุนนั้น ใช้ระนาบแก้ไขเพียงหนึ่งระนาบ: เพิ่มมวลที่ด้านหนักแล้วโรเตอร์จะสมดุล โรเตอร์ทั่วไป: รอกบาง, ล้อเจียรแคบ, ใบพัดแบบระนาบเดียว.
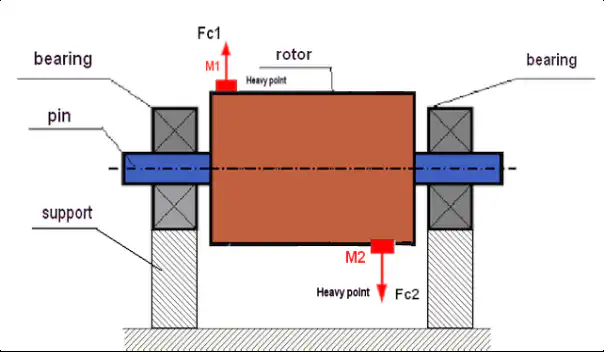
ความไม่สมดุลแบบคู่ควบ — จุดศูนย์กลางมวลอยู่บนแกน แต่แกนความเฉื่อยหลักเอียงไปด้านหนึ่ง ทำให้โรเตอร์แกว่งไปมาแทนที่จะสั่นเป็นวงกลม การแก้ไขปัญหานี้ไม่สามารถทำได้ในระนาบเดียว จำเป็นต้องใช้มวลสองก้อนที่มีขนาดเท่ากันและอยู่ตรงข้ามกัน 180° ในสองระนาบที่แยกจากกัน เพื่อหักล้างแรงบิดที่ทำให้เกิดการแกว่ง โรเตอร์ที่พบโดยทั่วไป ได้แก่ กลองทรงกระบอกยาว ขดลวดมอเตอร์ และชุดเพลา.
การไม่สมดุลแบบไดนามิก (แบบผสม) — กรณีทั่วไป: มีทั้งองค์ประกอบแบบสถิตและแบบคู่ควบ การแก้ไขต้องใช้สองระนาบที่เลือกได้ตามเหมาะสมบนเพลา โรเตอร์การผลิตจริงทั้งหมดอยู่ในกลุ่มนี้
| ปัจจัย | แบบระนาบเดียว (คงที่) | สองระนาบ (แบบไดนามิก) |
|---|---|---|
| รูปร่างของโรเตอร์ | แผ่นบาง; ความกว้างตามแนวแกนน้อยกว่าเส้นผ่านศูนย์กลางมาก | โรเตอร์กว้าง; ความกว้างตามแนวแกนเทียบเท่ากับหรือใหญ่กว่าเส้นผ่านศูนย์กลาง |
| ประเภทของความไม่สมดุล | ไม่สมดุลสถิตอย่างเดียว | ความไม่สมดุลคู่หรือรวมกัน (แบบไดนามิก) |
| อัตราส่วน L/D (ความยาวแกน / เส้นผ่านศูนย์กลาง) | L/D < 0.5 (ประมาณ) | L/D ≥ 0.5 (โรเตอร์แข็งที่ทำงานต่ำกว่าความเร็ววิกฤตอันดับแรก) ใกล้หรือเหนือความเร็ววิกฤต ให้ประเมินโรเตอร์เป็นแบบยืดหยุ่นก่อน (ISO 21940-12) — การถ่วงสมดุลสองระนาบเพียงอย่างเดียวอาจไม่เพียงพอ |
| จำนวนเซ็นเซอร์ | 1 เซ็นเซอร์วัดการสั่นสะเทือน + 1 เลเซอร์ทาโค | เซ็นเซอร์วัดการสั่นสะเทือน 2 ตัว + เครื่องวัดความเร็วด้วยเลเซอร์ 1 ตัว |
| จำนวนครั้งของการวัด | 3 รอบ (พื้นฐาน + ทดลอง + แก้ไข) | 4 รอบ (ค่าพื้นฐาน + น้ำหนักทดลองในระนาบ 1 + น้ำหนักทดลองในระนาบ 2 + การแก้ไข) |
| ระนาบแก้ไข | 1 | 2 |
| อุปกรณ์ทั่วไป | ใบพัดแบบแคบ, รอก, แผ่นดิสก์แบบชั้นเดียว | กลอง, เพลาขับ, ใบพัดกว้าง, โรเตอร์หลายขั้นตอน, โรเตอร์มอเตอร์ |
| เอกสารอ้างอิงมาตรฐาน | ISO 21940-11 (โรเตอร์แข็งแบบระนาบเดียว) | ISO 21940-11 (โรเตอร์แข็งสองระนาบ) |
หลักการโดยทั่วไป: หากการสั่นของโรเตอร์ที่วัดได้ที่แบริ่งด้านหนึ่งเปลี่ยนไปในทิศตรงข้ามกับการสั่นที่แบริ่งอีกด้านเมื่อคุณย้ายน้ำหนักทดลอง แสดงว่ามีองค์ประกอบแบบคู่ควบและจำเป็นต้องใช้สองระนาบ
ทำไมโรเตอร์กว้างจึงสูญเสียสมดุลเชิงพลวัต — และผลกระทบที่เกิดขึ้น
เมื่อโรเตอร์ถูกผลิตหรือซ่อมแซม มวลมักจะไม่กระจายตัวอย่างสมมาตรตามแกนของมัน การกัดกร่อนจะกัดกินปลายด้านหนึ่งของใบพัดให้เร็วกว่าอีกด้านหนึ่ง การซ่อมด้วยวิธีเชื่อมจะเพิ่มวัสดุที่ตำแหน่งเดียวตามแนวแกน การสะสมของผลิตภัณฑ์จะสะสมอย่างไม่สม่ำเสมอตามแนวถัง ผลลัพธ์ไม่ใช่แค่ความไม่สมดุลแบบคงที่เท่านั้น แต่ยังรวมถึง คู่ควบ องค์ประกอบที่ทำให้เกิดโมเมนต์การโยก การแก้ไขพร้อมกันในสองระนาบเท่านั้นจึงจะกำจัดทั้งสองอย่างได้ เนื่องจากแรงเหวี่ยงเพิ่มขึ้นตาม สี่เหลี่ยม กำลังสองของความเร็วรอบ ความไม่สมดุลแบบคู่ควบเพียงเล็กน้อยที่ 500 RPM จะกลายเป็นแรงทำลายล้างที่ 3,000 RPM
การละเลยส่วนประกอบคู่หมายความว่าตลับลูกปืนทั้งสองต้องรับน้ำหนักแบบไดนามิกที่สูงขึ้นทุกการหมุน ความล้าของตลับลูกปืนจะสะสม ซีลเสียหาย อุปกรณ์ยึดคลายตัว และรอยร้าวในโครงสร้างจะลุกลามจากฐานยึดออกไปด้านนอก ความสูญเสียทางเศรษฐกิจ — ตลับลูกปืน ซีล การผลิตที่สูญเสีย แรงงานฉุกเฉิน — มักจะสูงกว่าค่าใช้จ่ายในการทำงานสองระนาบอย่างถูกต้องหลายเท่าตัว.
ทำไมการลดการสั่นสะเทือนลงครึ่งหนึ่งจึงช่วยเพิ่มอายุการใช้งานของตลับลูกปืน
การปรับสมดุลสองระนาบ — ขั้นตอนภาคสนามทีละขั้นตอน
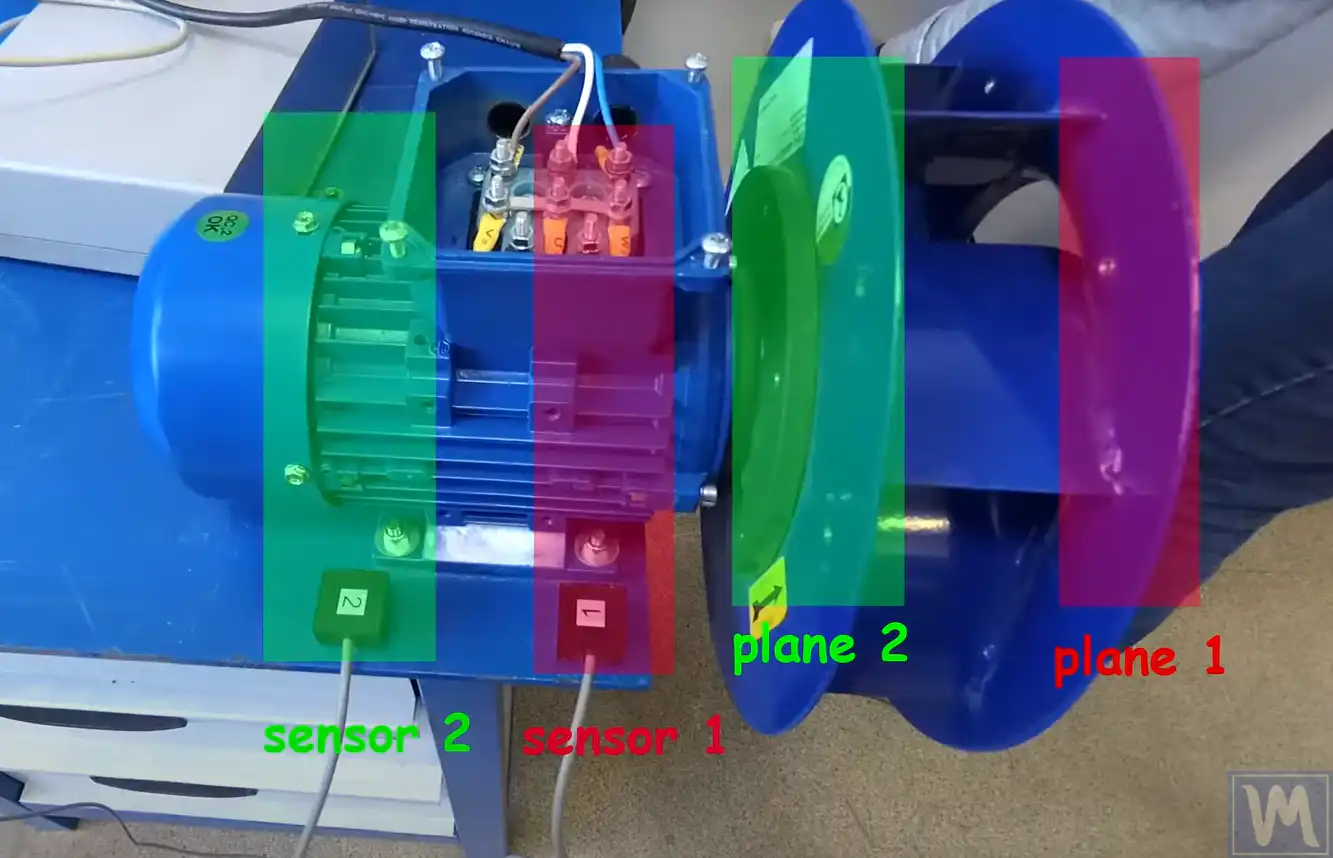
Balanset-1A ใช้หลักการวิเคราะห์ด้วยค่าสัมประสิทธิ์อิทธิพล โดยมีเซ็นเซอร์วัดการสั่นสะเทือนสองตัวและเลเซอร์ทาโค่หนึ่งตัวในการระบุลักษณะของโรเตอร์อย่างสมบูรณ์ และคำนวณหาค่าการแก้ไขทั้งสองระนาบได้ในครั้งเดียว ณ สถานที่ใช้งาน:
- ติดตั้งเซ็นเซอร์. ติดตั้งเครื่องวัดความเร่งการสั่นสะเทือนกับแต่ละตัวเรือนตลับลูกปืน (ระนาบ 1 และ 2) และเล็งเครื่องวัดความเร็วด้วยเลเซอร์ไปที่แถบสะท้อนแสงบนเพลา ไม่จำเป็นต้องถอดประกอบ — โรเตอร์ทำงานภายใต้สภาวะการทำงานปกติตลอดกระบวนการ.
- วัดค่าพื้นฐาน. การเดินเครื่องหนึ่งรอบที่ความเร็วสูงสุดทำการบันทึกค่าความใหญ่ของแรงสั่นสะเทือนและมุมเฟสพร้อมกันที่ตำแหน่งตลับลูกปืนทั้งสองจุด ซึ่งจะให้เวกเตอร์ 1× RPM เริ่มต้นที่กำหนดสถานะความไม่สมดุลเริ่มต้นในทั้งสองระนาบ.
- เพิ่มน้ำหนักทดลองในระนาบที่ 1. มวลที่ทราบค่าถูกยึดไว้ที่ตำแหน่งมุมที่ระบุในระนาบการแก้ไขแรก การทดสอบครั้งที่สองจะบันทึกวิธีที่น้ำหนักนี้ส่งผลต่อการสั่นสะเทือนที่ ทั้งคู่ ตำแหน่งแบริ่งทั้งสองตำแหน่ง ทำให้ได้สัมประสิทธิ์อิทธิพลสองค่าจากทั้งหมดสี่ค่า
- ย้ายน้ำหนักทดลองไปยังระนาบที่ 2. มวลเดิมถูกจัดวางตำแหน่งใหม่ไปยังระนาบแก้ไขที่สอง และทำการทดสอบอีกครั้งเพื่อบันทึกอิทธิพลข้ามกันระหว่างเซ็นเซอร์ทั้งสองตัว อุปกรณ์นี้จึงมีสัมประสิทธิ์อิทธิพลทั้งสี่ค่าที่จำเป็นสำหรับระบบ 2×2 เรียบร้อยแล้ว.
- ให้เครื่องคำนวณ. Balanset-1A แก้สมการสัมประสิทธิ์อิทธิพลแบบสองระนาบและแสดงมวลของน้ำหนักแก้ไขกับตำแหน่งเชิงมุมที่แน่นอนสำหรับแต่ละระนาบพร้อมกัน — ไม่ต้องคำนวณด้วยมือ
- ติดตั้งน้ำหนักแก้ไขและตรวจสอบผล น้ำหนักแก้ไขจะถูกวางไว้ที่ตำแหน่งที่คำนวณไว้บนทั้งสองระนาบ การทดสอบครั้งสุดท้ายจะยืนยันว่าความไม่สมดุลที่เหลืออยู่อยู่ในเกณฑ์ความทนทานตามมาตรฐาน ISO 21940-11 สำหรับเกรด G ที่ระบุไว้ และ Balanset-1A จะบันทึกเอกสารรายงานการปรับสมดุลไว้.
สิ่งที่เราถ่วงสมดุลในสองระนาบ
- ใบพัดลมแบบแรงเหวี่ยงกว้างและพัดลมเป่าแบบสองทางเข้า
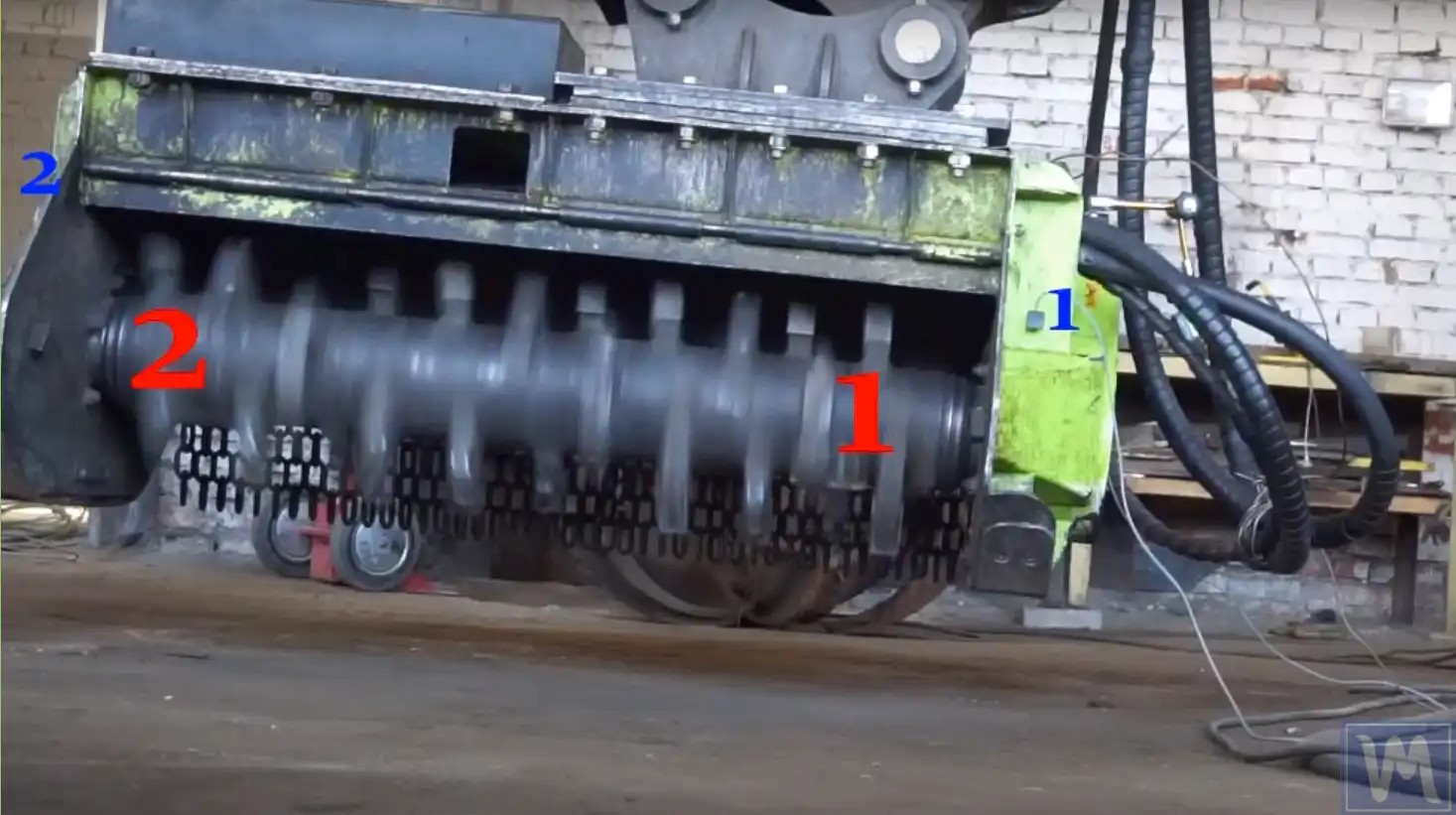
- กลองนวดและตัดของรถเกี่ยวข้าว
- เพลาขับและเพลาคาร์ดัน
- โรเตอร์ปั๊มหลายขั้นตอนและชุดใบพัดคอมเพรสเซอร์
- ลูกกลิ้งเครื่องกระดาษและลูกกลิ้งพิมพ์/เคลือบ
- สกรูคอนเวเยอร์และออเกอร์ที่มีความยาวกว่า ~500 มม.
- โรเตอร์มอเตอร์และโรเตอร์เครื่องกำเนิดไฟฟ้าที่มีความยาวตามแนวแกนมาก
- โรเตอร์เทอร์โบชาร์จเจอร์และโรเตอร์กังหันไอน้ำ (การตรวจสอบการสั่นสะเทือนภาคสนาม)
- โรเตอร์ใดก็ตามที่การแก้ไขแบบระนาบเดียวทำให้ตลับลูกปืนหนึ่งยังคงสั่นอยู่
ความคลาดเคลื่อนและมาตรฐาน
ISO 21940-11 (เดิมคือ ISO 1940-1) กำหนดเกรดคุณภาพการถ่วงสมดุล G0.4 ถึง G4000 สำหรับโรเตอร์แข็ง สำหรับโรเตอร์แข็ง — ที่ทำงานต่ำกว่าความเร็ววิกฤตอันดับแรกมาก — อัตราส่วนความยาวตามแกนต่อเส้นผ่านศูนย์กลางมากกว่าประมาณ 0.5 โดยทั่วไปต้องใช้การถ่วงสมดุลสองระนาบ โรเตอร์ที่ทำงานใกล้หรือเหนือความเร็ววิกฤตต้องประเมินเป็นโรเตอร์ยืดหยุ่นตาม ISO 21940-12: อาจต้องถ่วงสมดุลที่หลายความเร็วและมากกว่าสองระนาบ ดังนั้นการถ่วงสมดุลโรเตอร์แข็งสองระนาบแบบทั่วไปอาจไม่เพียงพอ ค่าความไม่สมดุลคงเหลือที่ยอมรับได้ต่อระนาบคำนวณดังนี้:
Uต่อ (g·mm) = eต่อ × m / 2, โดยที่ eต่อ = G × 9549 / n (mm/s × rpm → μm eccentricity), m คือมวลโรเตอร์เป็น kg และตัวคูณ 2 ใช้แบ่งค่าคลาดเคลื่อนเท่ากันระหว่างสองระนาบ โปรดทราบว่าการแบ่งเท่ากันนี้เป็นค่าประมาณเชิงปฏิบัติสำหรับโรเตอร์ที่ค่อนข้างสมมาตรและมีระนาบแก้ไขใกล้ตลับลูกปืน — ไม่ใช่กฎการจัดสรรค่าแบบสากลของ ISO; ISO 21940-11 จัดสรรค่าคลาดเคลื่อนต่างออกไปสำหรับการจัดวางระนาบและตลับลูกปืนแบบไม่สมมาตร
ใบพัดของพัดลมมักจะถูกปรับสมดุลเพื่อให้ G6.3 หรือ G2.5 ต่อ ISO 14694; ส่วนสปินเดิลเครื่องมือกลความแม่นยำและอุปกรณ์เทอร์โบความเร็วสูงมักกำหนดเป้าหมาย G1.0 หรือละเอียดกว่า ใช้ของเรา เครื่องคำนวณความไม่สมดุลคงเหลือ เพื่อหาค่าความคลาดเคลื่อนที่ยอมรับได้สำหรับเกรด G, มวลโรเตอร์ และความเร็วในการใช้งาน ก่อนเริ่มงาน.
Balanset-1A — ชุดอุปกรณ์การถ่วงสมดุลภาคสนามครบชุดของคุณ
การปรับสมดุลแบบไดนามิกสองระนาบของโรเตอร์แข็งใดๆ — พัดลม, กลอง, เพลาขับ, ชุดประกอบปั๊มหลายขั้นตอน — ทำได้ด้วยเครื่องมือพกพาเพียงเครื่องเดียว: Balanset-1A. เป็นเครื่องปรับสมดุลแบบไดนามิกและวิเคราะห์การสั่นสะเทือนสองช่องสัญญาณที่ปรับสมดุลโรเตอร์ ในตำแหน่งของตนเอง ขณะทำงานด้วยความเร็วที่กำหนด, โดยใช้วิธีสัมประสิทธิ์อิทธิพล — หนึ่งระนาบในสามรอบ สองระนาบในสี่รอบ ซอฟต์แวร์จะคำนวณมวลและมุมการแก้ไขที่แม่นยำสำหรับทั้งสองระนาบ และบันทึกเป็นรายงาน.

ชุดอุปกรณ์ครบชุดประกอบด้วยอะไรบ้าง
€1,975 · ชุดครบชุด, มีสินค้าในสต็อก, ใบกำกับภาษีมูลค่าเพิ่ม
- หน่วยวัดอินเตอร์เฟซ (USB, 2 ช่อง)
- เครื่องวัดความเร่งการสั่นสะเทือนสองตัว (สายเคเบิล 4 เมตร, 10 เมตรเป็นตัวเลือก)
- เครื่องวัดความเร็วรอบด้วยเลเซอร์ / เซ็นเซอร์เฟสแบบออปติคอล (50–500 mm)
- ขาตั้งแม่เหล็กสำหรับเซ็นเซอร์
- เครื่องชั่งดิจิทัลสำหรับน้ำหนักทดลอง & น้ำหนักแก้ไข
- ซอฟต์แวร์วิเคราะห์และปรับสมดุลระบบ Windows
- กล่องขนส่งพลาสติก
ชุดอุปกรณ์ครบชุด
หน่วย · เซ็นเซอร์ 2 ตัว · เครื่องวัดความเร็วด้วยเลเซอร์ · ขาตั้งแม่เหล็ก · เครื่องชั่งน้ำหนักดิจิทัล · ซอฟต์แวร์ · กล่องขนส่ง ทุกสิ่งที่จำเป็นสำหรับการเริ่มใช้งานทันที.
ชุด OEM
หน่วย · เซ็นเซอร์ 2 ตัว · เครื่องวัดความเร็วแบบเลเซอร์ · ซอฟต์แวร์ สำหรับผู้รวมระบบที่มีแท่นวาง, สเกล และกล่องอยู่แล้ว หรือผู้ที่ต้องการฝังหน่วยนี้ลงในเครื่องปรับสมดุล.
| พารามิเตอร์ | ค่า |
|---|---|
| ช่องทางการวัด | 2 (การถ่วงสมดุลแบบระนาบเดียว & สองระนาบ) |
| ช่วงความเร็วการสั่นสะเทือน | 0.2–80 mm/s RMS |
| ช่วงความถี่ | 5–1000 Hz (≤10% amplitude error above 550 Hz) |
| ความถูกต้องของการวัด | ±5% of full scale |
| วิธี | สัมประสิทธิ์อิทธิพลแบบ 3-run (1 หรือ 2 ระนาบ) |
| การวิเคราะห์ | แอมพลิจูด & เฟสที่ 1×, สเปกตรัม FFT & รูปคลื่น, รายงานที่บันทึกไว้ |
| แล็ปท็อป | ไม่รวม (คอมพิวเตอร์ Windows, สามารถขอได้) |
กรณีการปรับสมดุลสองระนาบที่แท้จริง

ดรัมรถเกี่ยวนวด (2 ระนาบ)
ถ่วงสมดุลระนาบแก้ไขทั้งสองได้ในการทำงานหน้างานเพียงครั้งเดียวบนรถเกี่ยวนวดทางการเกษตร
เพลาขับ (2-ระนาบ)
การปรับสมดุลแบบไดนามิกของเพลาขับยาวโดยใช้ตุ้มน้ำหนักแก้ไขที่ปลายแต่ละด้านของหน้าแปลน.

ใบพัดดูดอากาศกว้าง
การแก้ไขสองระนาบบนใบพัดของเครื่องดูดอากาศอุตสาหกรรมขนาดใหญ่ที่ผ่านการปรับสมดุลในตำแหน่งติดตั้ง.
การปรับสมดุลสองระนาบ — จากสนาม
การตั้งค่าสัมประสิทธิ์อิทธิพล
เซ็นเซอร์สองตัวและเลเซอร์ทาโคหนึ่งตัวที่ติดตั้งเพื่อกำหนดลักษณะของทั้งสองระนาบการแก้ไขพร้อมกัน.
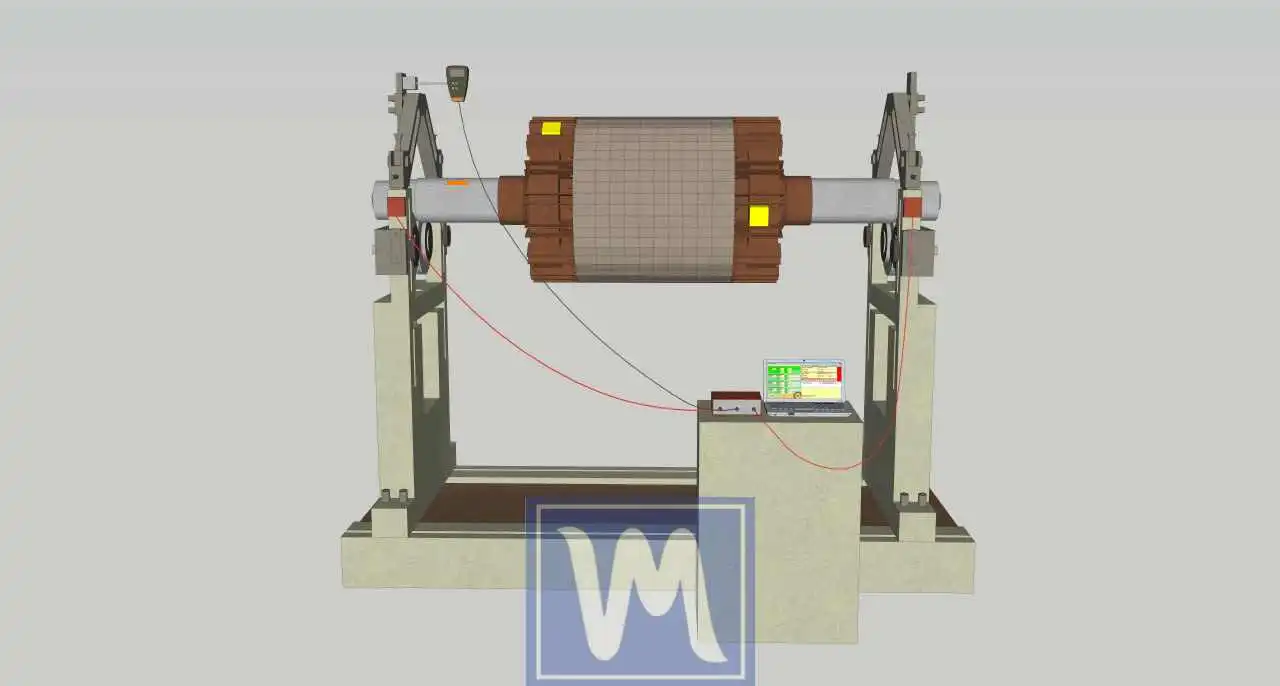
สมดุลในตำแหน่ง
โรเตอร์ยังคงอยู่ในตลับลูกปืนของตัวเองและได้รับการปรับแก้ไขที่ความเร็วในการทำงาน — ไม่จำเป็นต้องถอดออก.
คำนวณครบทั้งสองระนาบ
คำนวณมวลของน้ำหนักแก้ไขและมุมสำหรับระนาบ 1 และระนาบ 2 พร้อมกันในการทำงานครั้งเดียว
ผลลัพธ์ที่ผ่านการตรวจสอบแล้ว
การรันครั้งสุดท้ายยืนยันว่ามีความไม่สมดุลคงเหลืออยู่ภายในค่าความคลาดเคลื่อนที่อนุญาตตามมาตรฐาน ISO 21940-11 ในทั้งสองระนาบ.
เครื่องคิดเลขฟรีสำหรับการปรับสมดุลสองระนาบ
คำถามที่พบบ่อยเกี่ยวกับการปรับสมดุลสองระนาบ
เมื่อใดที่การปรับสมดุลแบบระนาบเดียวเพียงพอ?
วิธีการสัมประสิทธิ์อิทธิพลทำงานอย่างไรสำหรับสองระนาบ?
งานที่ต้องวัดสองระนาบต้องทำการวัดกี่ครั้ง?
ฉันจำเป็นต้องถอดโรเตอร์ออกจากเครื่องหรือไม่?
ฉันควรมุ่งเป้าไปที่เกรดคุณภาพสมดุลใดสำหรับโรเตอร์ของฉัน?
ทีมบำรุงรักษาของเราสามารถทำการปรับสมดุลแบบสองระนาบด้วย Balanset-1A ได้หรือไม่?
เรียนรู้ทฤษฎี
แก้ปัญหาทั้งสองระนาบในการเข้าใช้งานเพียงครั้งเดียว — ด้วยความเร็วในการทำงาน ไม่ต้องถอดชิ้นส่วน
Balanset-1A พาคุณผ่านขั้นตอนสัมประสิทธิ์อิทธิพลแบบสองระนาบครบถ้วน: ค่าพื้นฐาน การทดลองในระนาบ 1 การทดลองในระนาบ 2 การแก้ไข และการตรวจสอบ — ทั้งหมดทำที่ความเร็วใช้งานจริง ในแบริ่งของโรเตอร์เอง พร้อมเอกสารค่าความไม่สมดุลคงเหลือตาม ISO 21940-11, ISO 14694 และ API 610 พร้อมจัดส่ง