ბალანსირების სერვისები › ორპლანიანი (დინამიკური) დაბალანსება
ორპლანიანი (დინამიკური) დაბალანსება — მეთოდი, ფიზიკა და ადგილზე შესრულების პროცედურა
როდესაც როტორი იმდენად ფართოა, რომ უსიმეტრია მის ორივე ბოლოზე განსხვავებულია, ერთი გამოსწორების სიბრტყე საკმარისი არ არის. ორსიბრტყიანი დინამიკური დაბალანსება ერთდროულად ასწორებს როგორც სტატიკურ, ისე მომენტის კომპონენტებს — გამოყენებით გავლენის კოეფიციენტების მეთოდი — ასე რომ, როტორი მთელი სიგრძის გასწვრივ ერთგვაროვნად მუშაობს და არა მხოლოდ ცენტრში.
მოკლედ: ორპლანიანი (დინამიკური) დაბალანსება საჭიროა მაშინ, როდესაც როტორს აქვს როგორც სტატიკური დისბალანსი, ისე მომენტის კომპონენტი — ანუ როცა დისბალანსი კონცენტრირებული კი არ არის ერთ დისკზე, არამედ განაწილებულია ლილვის ღერძის გასწვრივ. თითოეული საკისრის კორპუსზე დამონტაჟებული ვიბრაციის სენსორი და ლილვზე მიმართული ლაზერული ტახომეტრი გამოიყენება იმის გასაზომად, თუ როგორ რეაგირებს როტორი საცდელ წონებზე, რომლებიც რიგრიგობით თავსდება თითოეულ სიბრტყეში; შემდეგ Balanset-1A ერთდროულად ითვლის ზუსტ საკორექციო მასასა და კუთხეს ორივე სიბრტყისთვის. დანადგარიდან მოხსნა საჭირო არ არის — ოთხგაშვებიანი სრული პროცედურა სრულდება საექსპლუატაციო სიჩქარეზე, როტორის საკუთარ საკისრებში, და უმეტეს როტორებზე ერთ საათზე ნაკლებ დროში.
ნიშნები, რომ თქვენს როტორს სჭირდება ორპლანიანი დაბალანსება
ერთპლანიანი კორექცია შეიძლება ერთ ბეარინგს დაამშვიდოს, სანამ მეორე ჯერ კიდევ ირხევა. თუ რომელიმე ამ სქემას შეამჩნევთ, ორპლანიანი დამუშავება სწორი გადაწყვეტილებაა:
ერთი სიბრტყე თუ ორი: როდის გჭირდებათ ორი სიბრტყე?
ერთ და ორ საკორექციო სიბრტყეს შორის არჩევანი დამოკიდებულია როტორის გეომეტრიასა და მისი არათანაბრობის ბუნებაზე. არათანაბრობის სამი ტიპის ცოდნა დაუყოვნებლივ გადაწყვეტილების მიღებაში გეხმარებათ.
არაბალანსის სამი ტიპი
სტატიკური დისბალანსი — მასის ცენტრი მდებარეობს ბრუნვის ღერძისგან გადახრილი, მაგრამ მთავარი ინერციის ღერძი მას პარალელურია. საკმარისია ერთი საკორექციო სიბრტყე: დაამატეთ მასა მძიმე მხარეს და როტორი დაბალანსდება. ტიპური როტორები: თხელი ბორბლები, ვიწრო სახეხი ბორბლები, ერთსიბრტყიანი სავენტილაციო დისკები.
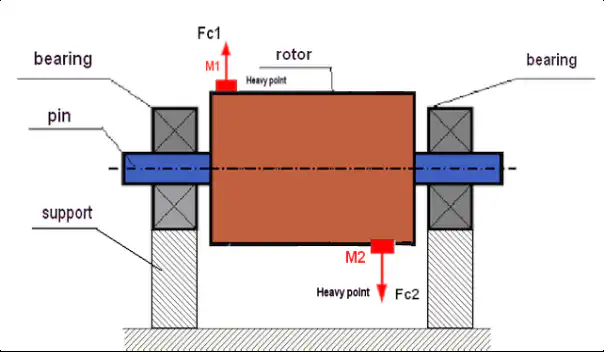
წყვილის დისბალანსი — მასის ცენტრი ღერძზეა, მაგრამ მთავარი ინერციის ღერძი დახრილია. როტორი კიდიანობს და არა ირხევა. ამის გამოსწორება ერთ სიბრტყეში შეუძლებელია; კიდიანობის მომენტის გასაუქმებლად საჭიროა ორი თანაბარი და საპირისპირო მასის, რომლებიც 180°-ით არიან დაშორებული ორ სხვადასხვა სიბრტყეში. ტიპური როტორები: გრძელი ცილინდრული დოლურები, ძრავის არმატურები, ღერძების აგებულებები.
დინამიკური (შერეული) დისბალანსი — ზოგადი შემთხვევა: წარმოდგენილია როგორც სტატიკური, ისე მომენტის კომპონენტები. კორექტირება მოითხოვს ღერძის გასწვრივ ნებისმიერად შერჩეულ ორ სიბრტყეს. ყველა რეალური საწარმოო როტორი ამ კატეგორიას მიეკუთვნება.
| ფაქტორი | ერთპლანიანი (სტატიკური) | ორპლანური (დინამიკური) |
|---|---|---|
| როტორის ფორმა | თხელი დისკი; ღერძული სიგანე დიამეტრზე ბევრად მცირეა | ფართო როტორი; ღერძული სიგანე დიამეტრის ტოლი ან მასზე დიდი |
| დისბალანსის ტიპი | მხოლოდ სტატიკური დისბალანსი | მომენტური ან შერეული (დინამიკური) დისბალანსი |
| სიგრძე-დიამეტრის შეფარდება (აქსალური სიგრძე / დიამეტრი) | L/D < 0.5 (დაახლ.) | L/D ≥ 0.5 (ხისტი როტორი, რომელიც მუშაობს თავის პირველ კრიტიკულ სიჩქარეზე ქვემოთ). კრიტიკულ სიჩქარესთან ახლოს ან მის ზემოთ როტორი ჯერ შეაფასეთ როგორც ელასტიკური (ISO 21940-12) — მხოლოდ ორსიბრტყიანი დაბალანსება შეიძლება არასაკმარისი იყოს |
| სენსორების რაოდენობა | 1 ვიბრაციის სენსორი + 1 ლაზერული ტახომეტრი | 2 ვიბრაციის სენსორი + 1 ლაზერული ტახომეტრი |
| გაზომვების რაოდენობა | 3 გაზომვა (საბაზისო + საცდელი + შესწორება) | 4 გაზომვა (საბაზისო + პირველი პლანის ცდა + მეორე პლანის ცდა + კორექცია) |
| კორექციის სიბრტყეები | 1 | 2 |
| ტიპური აღჭურვილობა | ვიწრო ფანუსისებრი იმპელერები, ბერკეტები, ერთსაფეხურიანი დისკები | ბარაბნები, ამძრავი ღერძები, ფართო იმპელერები, მრავალსაფეხურიანი როტორები, ძრავის როტორები |
| სტანდარტული მითითება | ISO 21940-11 (1-plane rigid rotor) | ISO 21940-11 (2-plane rigid rotor) |
ზოგადი წესი: თუ საცდელი წონის გადაადგილებისას, როტორის ვიბრაცია, რომელიც ერთ ბეარინგზე იზომება, საპირისპირო მიმართულებით იცვლება მეორე ბეარინგზე დაფიქსირებული ვიბრაციისგან, ეს ნიშნავს, რომ გვაქვს მომენტის კომპონენტი და საჭიროა ორი სიბრტყე.
რატომ კარგავენ ფართო როტორები დინამიკურ ბალანსს — და რა უჯდებათ ეს
როდესაც როტორი მზადდება ან რემონტირდება, მასა იშვიათად ნაწილდება სიმეტრიულად მისი ღერძის გასწვრივ. ეროზია იმპელერის ერთ ბოლოს უფრო სწრაფად აცვლის, ვიდრე მეორეს; შედუღებითი შეკეთება მასალას მხოლოდ ერთ ღერძულ უბანზე ამატებს; ნადების დაგროვება დრამის გასწვრივ არათანაბრად ხდება. შედეგად ვიღებთ არა მხოლოდ სტატიკურ უბალანსობას, არამედ წყვილი კომპონენტი, რომელიც ქანქარის მომენტს ქმნის. მხოლოდ ორ სიბრტყეში ერთდროული კორექცია ორივეს აღმოფხვრის. რადგან ცენტრიფუგალური ძალა იზრდება კვადრატი ბრუნვის სიჩქარის ზრდასთან ერთად, 500 ბრ/წთ-ზე არსებული მოკრძალებული მაბრუნებელი მომენტის არათანაბრობა 3000 ბრ/წთ-ზე დესტრუქციულ ძალად იქცევა.
მომენტის კომპონენტის უგულებელყოფა ნიშნავს, რომ ორივე საკისარი ყოველ ბრუნზე გაზრდილ დინამიკურ დატვირთვას იღებს. საკისრების დაღლილობა გროვდება, ლუქები მწყობრიდან გამოდის, სამაგრები მოდუნდება, ხოლო სტრუქტურული ბზარები სამაგრი ფეხებიდან გარეთ ვრცელდება. ეკონომიკური ზარალი — საკისრები, ლუქები, დაკარგული წარმოება, ავარიული შრომა — როგორც წესი, მრავალჯერ აღემატება სწორად შესრულებული ორსიბრტყიანი სამუშაოს ღირებულებას.
რატომ ზრდის ვიბრაციის შერბილება საყრდენის ექსპლუატაციის ვადას
ორპლანიანი დაბალანსება — ეტაპობრივი საველე პროცედურა
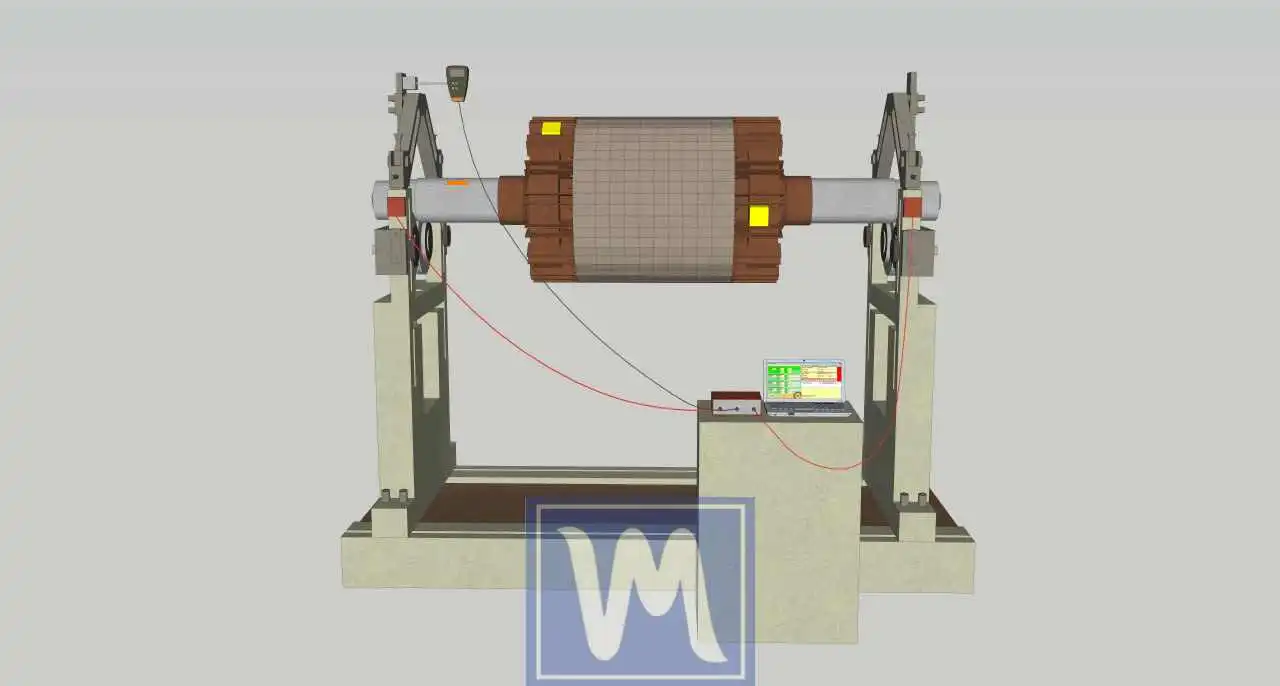
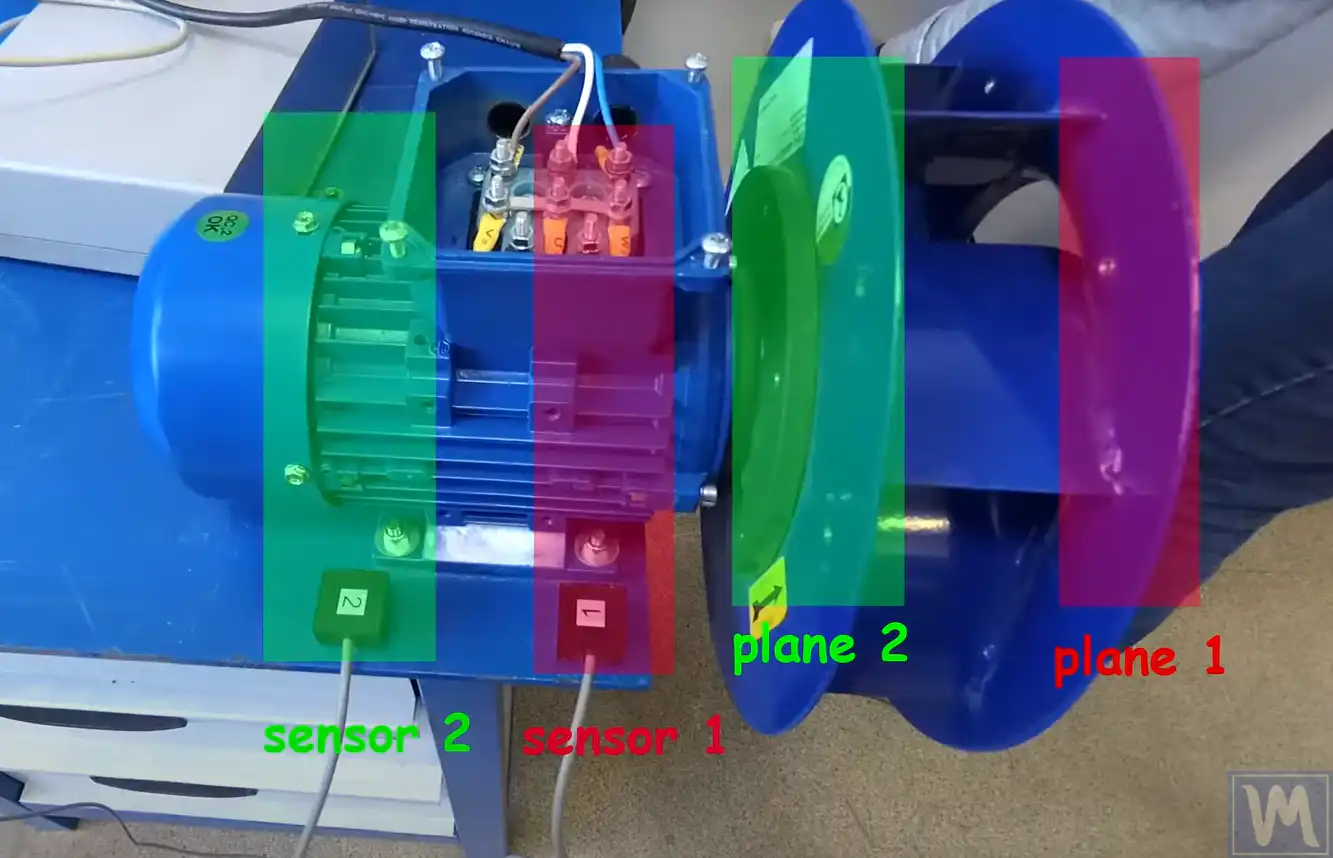
Balanset-1A იყენებს გავლენის კოეფიციენტების მეთოდს. ორი ვიბრაციული სენსორი და ერთი ლაზერული ტახომეტრი სრულად ახასიათებს როტორს და ადგილზე ერთი სესიის განმავლობაში ადგენს კორექციის ორივე სიბრტყეს:
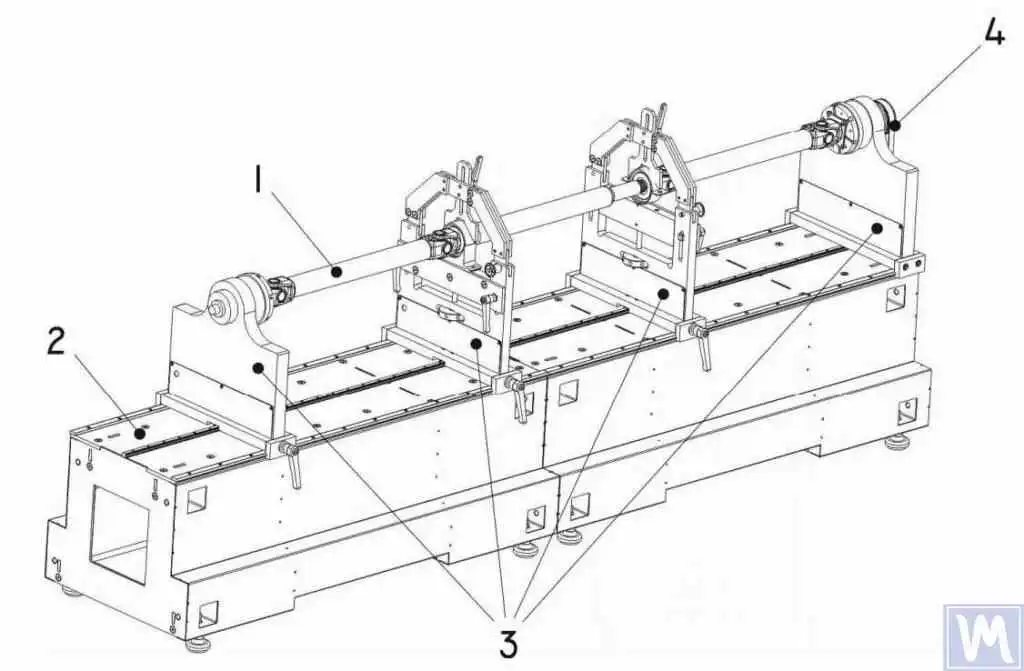
- დაამონტაჟეთ სენსორები. დაამაგრეთ ვიბრაციული აჩქარების სენსორი თითოეულ საკისრის კორპუსზე (სიბრტყეები 1 და 2) და მიმართეთ ლაზერული ტახომეტრი ლილვზე არსებულ ამრეკლ ზოლზე. დაშლა არ არის საჭირო — როტორი მთელი პროცედურის განმავლობაში მუშაობს ჩვეულებრივ საექსპლუატაციო პირობებში.
- დააკვირდით საწყის მდგომარეობას. ერთი გაშვება სრული საექსპლუატაციო სიჩქარით ერთდროულად აღრიცხავს ვიბრაციის ამპლიტუდსა და ფაზის კუთხეს ორივე საყრდენში, რაც იძლევა საწყისი 1× ბრუნ/წთ ვექტორებს, რომლებიც განსაზღვრავენ საწყის აუბალანსებულ მდგომარეობას ორივე სიბრტყეში.
- დაამატეთ საცდელი წონა 1-ელ სიბრტყეში. ცნობილი მასა დაჭერილია ნიშნულ კუთხოვან პოზიციაზე პირველ საკორექციო სიბრტყეში. მეორე გაზომვა აღრიცხავს, თუ როგორ მოქმედებს ეს წონა ვიბრაციაზე ორივე საკისრების მდებარეობებზე, რითაც ოთხი გავლენის კოეფიციენტიდან ორს ვიღებთ.
- გადაიტანეთ საცდელი წონა მე-2 სიბრტყეში. იგივე მასა გადაადგილდება მეორე კორექციის სიბრტყეზე და ახალი გაშვება ორივე სენსორზე ჯვარედინ გავლენას აღრიცხავს. მოწყობილობას ახლა უკვე აქვს 2×2 სისტემისთვის საჭირო ოთხივე გავლენის კოეფიციენტი.
- მიეცით მოწყობილობას გამოთვლის საშუალება. ბალანსეტ-1A ხსნის ორპლანური გავლენის კოეფიციენტების განტოლებებს და ერთდროულად გამოაქვს ზუსტი საკორექციო მასა და კუთხური მდებარეობა თითოეული სიბრტყისთვის — არ არის საჭირო არანაირი მანუალური არითმეტიკული გამოთვლა.
- შეასწორეთ და გადაამოწმეთ. საკორექციო წონები თავსდება გამოთვლილ პოზიციებზე ორივე სიბრტყეზე. საბოლოო გაშვება ადასტურებს, რომ ნარჩენი არათანაბრობა ISO 21940-11-ის დაშვებების ფარგლებშია მითითებული G-კლასისთვის და Balanset-1A ინახავს დოკუმენტირებულ დაბალანსების ანგარიშს.
რას ვბალანსირებთ ორ სიბრტყეში
- ფართო ცენტრფუგალური ვენტილატორის მბრუნავი ფრთები და ორშემოსასვლელიანი ბუფერები
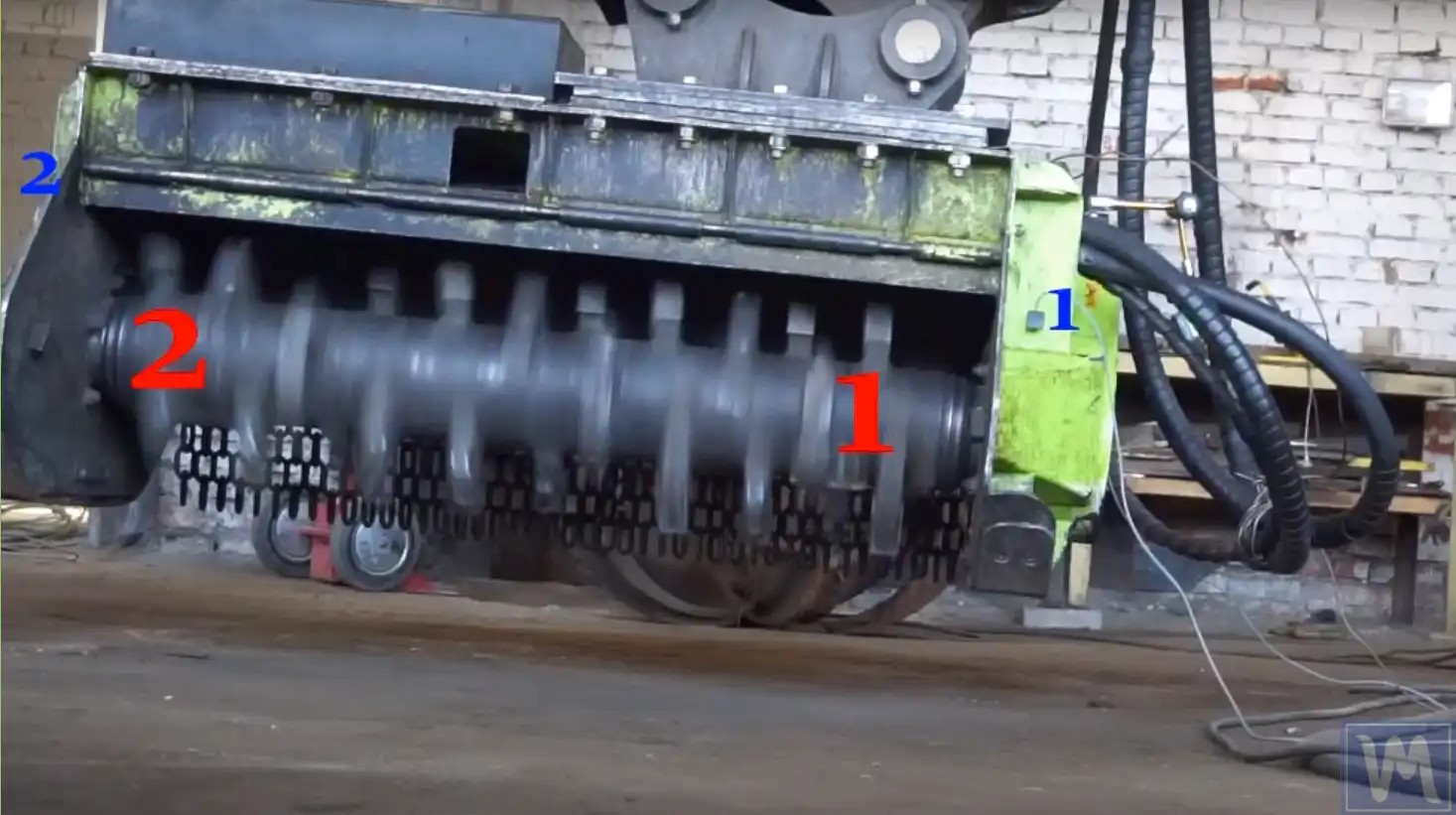
- კომბაინის წისქვილისა და დაჭრის დოლურები
- მომენტის გადამცემი ღერძები და კარდანის ღერძები
- მრავალსაფეხურიანი ტუმბოს როტორები და კომპრესორის იმპელერების დასტები
- ქაღალდის მანქანის როლები და ბეჭდვის/დაფენის ცილინდრები
- მუხლა-გამტარები და ხრახნები, რომელთა სიგრძეც 500 მმ-ზე მეტია
- ძრავის როტორები და გენერატორის როტორები მნიშვნელოვანი ღერძული სიგრძით
- ტურბოკომპრესორის როტორები და ორთქლტურბინის როტორები (მინდვრის ვიბრაციის ვერიფიკაცია)
- ნებისმიერი როტორი, რომლის შემთხვევაშიც ერთსიბრტყიანი კორექციის შემდეგ ერთ-ერთი საკისარი მაინც აგრძელებს რხევას
დაშვებები და სტანდარტები
ISO 21940-11 (ყოფილი ISO 1940-1) განსაზღვრავს ბალანსის ხარისხის კლასებს G0.4-დან G4000-მდე ხისტი როტორებისთვის. ხისტი როტორებისთვის — რომლებიც მუშაობენ თავიანთ პირველ კრიტიკულ სიჩქარეზე მნიშვნელოვნად ქვემოთ — ღერძული სიგრძისა და დიამეტრის შეფარდება დაახლოებით 0.5-ზე მეტი ჩვეულებრივ ორსიბრტყიან დაბალანსებას მოითხოვს. როტორი, რომელიც მუშაობს კრიტიკულ სიჩქარესთან ახლოს ან მის ზემოთ, ჯერ უნდა შეფასდეს როგორც ელასტიკური როტორი სტანდარტის მიხედვით ISO 21940-12: მას შეიძლება სჭირდებოდეს დაბალანსება რამდენიმე სიჩქარეზე და ორზე მეტ სიბრტყეში, ამიტომ ჩვეულებრივი ორსიბრტყიანი ხისტი როტორის დაბალანსება შეიძლება არასაკმარისი იყოს. თითო სიბრტყეზე დასაშვები ნარჩენი დისბალანსი გამოითვლება ასე:
Uთითო (g·mm) = eთითო × m / 2, სადაც eთითო = G × 9549 / n (mm/s × rpm → μm ექსცენტრულობა), m არის როტორის მასა kg-ში, ხოლო კოეფიციენტი 2 ტოლერანსს თანაბრად ანაწილებს ორ სიბრტყეს შორის. გაითვალისწინეთ, რომ ეს თანაბარი გაყოფა არის პრაქტიკული მიახლოება დაახლოებით სიმეტრიული როტორებისთვის, რომელთა საკორექციო სიბრტყეები საკისრებთან ახლოსაა — და არა უნივერსალური ISO განაწილების წესი; ISO 21940-11 ტოლერანსს განსხვავებულად ანაწილებს სიბრტყეებისა და საკისრების ასიმეტრიული განლაგებისთვის.
ვენტილატორის როტორები, როგორც წესი, ბალანსდება G6.3 ან G2.5 თითო ISO 14694; მაღალი სიზუსტის ჩარხის სპინდელები და მაღალსიჩქარიანი ტურბო აღჭურვილობა სამიზნე G1.0 ან უფრო წვრილი. გამოიყენეთ ჩვენი ნარჩენი არათანაბრობის კალკულატორი სამუშაოს დაწყებამდე თქვენი G-ჯგუფის, როტორის მასისა და საექსპლუატაციო სიჩქარისთვის დაშვებული დაშვებადობის დადგენა.
ბალანსეტ-1A — თქვენი სრული მოწყობილობა საველე დაბალანსებისთვის
ნებისმიერი მყარი როტორის — ვენტილატორების, დოლურების, ამძრავი ლილვების, მრავალსაფეხურიანი სატუმბი აგებულებების — ორსიბრტყიანი დინამიკური დაბალანსება ხორციელდება ერთი პორტატული ინსტრუმენტით: ბალანსეტი-1ა. ეს არის ორარხიანი დინამიკური ბალანსერი და ვიბრაციის ანალიზატორი, რომელიც ბალანსირებს როტორებს თავიანთ ბრუნვაში, საექსპლუატაციო სიჩქარით, გავლენის კოეფიციენტების მეთოდის გამოყენებით — სამი გაშვებისას ერთი, ოთხი გაშვებისას ორი. პროგრამული უზრუნველყოფა ითვლის ორივე სიბრტყისთვის ზუსტ საკორექციო მასასა და კუთხეს და ინახავს ანგარიშს.

რა შედის სრულ კომპლექტში
1,975 ევრო · სრული ნაკრები, მარაგშია, დღგ-ს ინვოისი
- ინტერფეისის საზომი ბლოკი (USB, 2 არხი)
- ორი ვიბრაციული აჩქარების სენსორი (4 მ-იანი კაბელი, 10 მ-იანი დამატებით)
- ლაზერული ტაქომეტრი / ოპტიკური ფაზის სენსორი (50–500 მმ)
- მაგნიტური სადგამი სენსორისთვის
- ციფრული სასწორი საცდელი და საკორექციო წონებისთვის
- Windows-ის დაბალანსებისა და ანალიზის პროგრამული უზრუნველყოფა
- პლასტმასის სატრანსპორტო კონტეინერი
სრული კომპლექტი
კომპლექტი · 2 სენსორი · ლაზერული ტაქომეტრი · მაგნიტური სადგამი · ციფრული სასწორი · პროგრამული უზრუნველყოფა · ტრანსპორტირების ჩანთა. ყველაფერი, რაც საჭიროა ორპლანიანი დაბალანსების დასაწყებად, შეფუთვიდანვე ხელმისაწვდომია.
ორიგინალი კომპლექტი
ბლოკი · 2 სენსორი · ლაზერული ტახომეტრი · პროგრამული უზრუნველყოფა. ინტეგრატორებისთვის, რომლებსაც უკვე აქვთ სტენდი, სასწორი და კორპუსი, ან რომლებიც ბლოკს ბალანსირების მანქანაში ათავსებენ.
| პარამეტრი | ღირებულება |
|---|---|
| გაზომვის არხები | 2 (ერთი და ორპლანიანი დაბალანსება) |
| ვიბრაციის სიჩქარის დიაპაზონი | 0.2–80 mm/s RMS |
| სიხშირის დიაპაზონი | 5–1000 Hz (≤10% ამპლიტუდის ცდომილება 550 Hz-ის ზემოთ) |
| ზუსტობა | სრული მასშტაბის ±5% |
| მეთოდი | 3-ქულიანი გავლენის კოეფიციენტი (1 ან 2 სიბრტყე) |
| ანალიზი | ამპლიტუდა და ფაზა 1×-ზე, FFT სპექტრი და ტალღის ფორმა, შენახული ანგარიშები |
| ლეპტოპი | არ შედის (Windows PC, ხელმისაწვდომია მოთხოვნის შემთხვევაში) |
ნამდვილი ორპლანიანი დაბალანსების შემთხვევები

კომბაინის დოლურა (2-plane)
სასოფლო-სამეურნეო კომბაინზე ერთი საველე სესიის განმავლობაში ორივე საკორექციო სიბრტყე დაბალანსდა.
ამძრავებელი ღერძი (2-პლანიანი)
გრძელი ამძრავი ღერძის დინამიკური დაბალანსება კორექტირების წონებით თითოეულ საბოლოო ფლანეცზე.

ფართო გამწოვი იმპელერი
ფართო სამრეწველო გამწოვის იმპელერზე ორსიბრტყიანი კორექცია, დაბალანსებული ადგილზე.
ორპლანიანი დაბალანსება — ველიდან
გავლენის კოეფიციენტის პარამეტრების დაყენება
ორი სენსორი და ერთი ლაზერული ტახომეტრი, განლაგებული იმისთვის, რომ ერთდროულად დაახასიათოს ორივე საკორექციო სიბრტყე.
ბალანსირებული ადგილზე
როტორი რჩება საკუთარ საკისრებში და კორექტირდება საექსპლუატაციო სიჩქარეზე — დემონტაჟი არ არის საჭირო.
ორივე სიბრტყე გამოთვლილია
კორექციის მასა და კუთხე გამოთვლილია 1-ლი და მე-2 სიბრტყისთვის ერთდროულად, ერთ სეანსში.
დადასტურებული შედეგი
საბოლოო გაშვება ადასტურებს ნარჩენ არათანაბრობას ISO 21940-11-ის დაშვების ფარგლებში ორივე სიბრტყეზე.
უფასო კალკულატორები ორპლანიანი დაბალანსებისთვის
ხშირად დასმული კითხვები ორპლანიანი დაბალანსების შესახებ
როდის არის საკმარისი ერთსიბრტყიანი დაბალანსება?
როგორ მუშაობს გავლენის კოეფიციენტების მეთოდი ორ სიბრტყეზე?
რამდენ ზომვის სერიას მოითხოვს ორპლანიანი სამუშაო?
საჭიროა თუ არა როტორის მანქანიდან მოხსნა?
როტორისთვის რა ბალანსის ხარისხის დონეზე უნდა ვისწრაფვოდე?
შეუძლია ჩვენს ტექნიკურ სამსახურს Balanset-1A-თი ორპლანიანი დაბალანსება?
ისწავლე თეორია
ორივე სიბრტყე ერთ ვიზიტში მოაგვარეთ — საექსპლუატაციო სიჩქარეზე, დემონტაჟის გარეშე
Balanset-1A გიძღვებათ ორსიბრტყიანი გავლენის კოეფიციენტის სრული პროცედურის გავლით: საწყისი მდგომარეობა, 1-ლი სიბრტყის ცდა, მე-2 სიბრტყის ცდა, კორექტირება და შემოწმება — ყველაფერი სამუშაო სიჩქარით, როტორის საკუთარ საკისრებში. ნარჩენი დისბალანსი დოკუმენტირდება ISO 21940-11, ISO 14694 და API 610-ის შესაბამისად. მზადაა გადასაზიდად.