ব্যালান্সিং সেবা › দুই-তল (ডায়নামিক) ভারসাম্য
দ্বি-সমতল (গতিশীল) ভারসাম্য — পদ্ধতি, পদার্থবিজ্ঞান এবং ক্ষেত্র পদ্ধতি
যখন একটি রোটর এত প্রশস্ত যে অসামঞ্জস্য প্রতিটি প্রান্তে আলাদা হয়, একটি একক সংশোধন সমতল যথেষ্ট নয়। দ্বি-সমতল গতিশীল ভারসাম্য একযোগে স্থির এবং দম্পতি উপাদান উভয়ই সংশোধন করে — ব্যবহার করে প্রভাব-সহগ পদ্ধতি — তাই রোটর তার সম্পূর্ণ দৈর্ঘ্য জুড়ে মসৃণভাবে চলে, শুধুমাত্র এর কেন্দ্রে নয়।
সংক্ষেপে: দ্বি-তল (গতিশীল) ভারসাম্য রক্ষা প্রয়োজন যখন একটি রোটর স্ট্যাটিক ভারসাম্যহীনতা এবং একটি যুগল উপাদান উভয়ই বহন করে — অর্থাৎ ভারসাম্যহীনতা শ্যাফ্টের অক্ষ জুড়ে বিতরণ করা হয় বরং একটি ডিস্কে কেন্দ্রীভূত নয়। প্রতিটি বেয়ারিং হাউজিংয়ে একটি কম্পন সেন্সর এবং শ্যাফ্টে একটি লেজার ট্যাকোমিটার রোটরের প্রতিক্রিয়া পরিমাপ করতে ব্যবহৃত হয় যা পরীক্ষামূলক ওজনের সাথে প্রতিটি তলে পালাক্রমে স্থাপন করা হয়; Balanset-1A তখন উভয় তলে একযোগে সঠিক সংশোধন ভর এবং কোণের জন্য সমাধান করে। মেশিন থেকে অপসারণের প্রয়োজন নেই — সম্পূর্ণ চার-রান পদ্ধতি অপারেটিং গতিতে, রোটরের নিজস্ব বেয়ারিংয়ে, বেশিরভাগ রোটরের জন্য এক ঘন্টার মধ্যে সম্পন্ন হয়।
আপনার রোটরকে দ্বি-তল ভারসাম্য রক্ষার প্রয়োজনের লক্ষণ
একটি একক-তল সংশোধন একটি বেয়ারিংকে নীরব করতে পারে যখন অন্যটি এখনও কাঁপছে। যদি আপনি এই প্যাটার্নগুলির মধ্যে কোনও দেখেন তবে দ্বি-তল চিকিৎসা সঠিক উত্তর:
একক-তল বনাম দ্বি-তল: আপনার কখন দুটি তল প্রয়োজন?
এক এবং দুটি সংশোধন তল মধ্যে পছন্দ রোটরের জ্যামিতি এবং এর ভারসাম্যহীনতার প্রকৃতির উপর নির্ভর করে। ভারসাম্যহীনতার তিনটি প্রকার বোঝা আপনাকে অবিলম্বে সিদ্ধান্ত নিতে সাহায্য করে।
ভারসাম্যহীনতার তিনটি প্রকার
স্থির অসাম্য — ভর কেন্দ্র ঘূর্ণন অক্ষ থেকে বন্ধ বসে কিন্তু প্রধান জড়তা অক্ষ এর সমান্তরাল। একটি সংশোধন তল যথেষ্ট: ভারী দিকে ভর যোগ করুন এবং রোটর ভারসাম্যপূর্ণ। সাধারণ রোটর: পাতলা পুলি, সংকীর্ণ গ্রাইন্ডিং চাকা, একক-তল ফ্যান ডিস্ক।
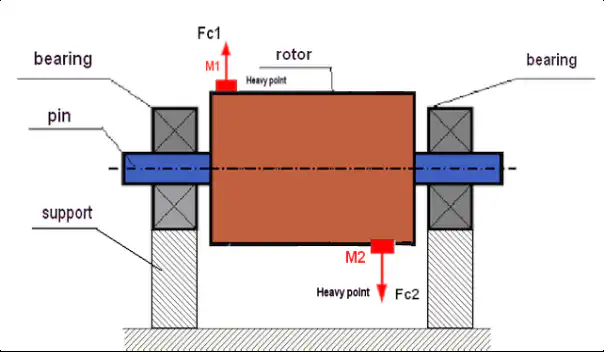
দ্বি-সমতল অসন্তুলন — ভর কেন্দ্র অক্ষে আছে কিন্তু প্রধান জড়তা অক্ষ হেলানো। রোটর দোলে বরং কাঁপে না। এটি একটি তলে সংশোধন করা যায় না; দুটি সমান এবং বিপরীত ভর 180° পৃথক দুটি তলে একে অপরকে বাতিল করার জন্য প্রয়োজন। সাধারণ রোটর: দীর্ঘ নলাকার ড্রাম, মোটর আর্মেচার, শ্যাফ্ট সমাবেশ।
গতিশীল (সংমিশ্রিত) ভারসাম্যহীনতা — সাধারণ ক্ষেত্র: স্ট্যাটিক এবং যুগল উপাদান উভয়ই উপস্থিত। সংশোধনের জন্য শ্যাফ্টের সাথে দুটি তল স্বেচ্ছাচারভাবে নির্বাচিত প্রয়োজন। সমস্ত বাস্তব উৎপাদন রোটর এই বিভাগে পড়ে।
| ফ্যাক্টর | একক-তল (স্থির) | দ্বি-তল (গতিশীল) |
|---|---|---|
| রোটরের আকৃতি | পাতলা ডিস্ক; অক্ষীয় প্রস্থ ব্যাসের চেয়ে অনেক কম | বিস্তৃত রোটর; অক্ষীয় প্রস্থ ব্যাসের সাথে তুলনীয় বা বড় |
| আনব্যালেন্সের ধরন | শুধুমাত্র স্থির ভারসাম্যহীনতা | যুগল বা সম্মিলিত (গতিশীল) ভারসাম্যহীনতা |
| L/D অনুপাত (অক্ষীয় দৈর্ঘ্য / ব্যাস) | L/D < 0.5 (প্রায়) | L/D ≥ 0.5 (rigid rotor running below its first critical speed)। critical speed-এর কাছে বা তার উপরে হলে, আগে rotor-টিকে flexible হিসেবে মূল্যায়ন করুন (ISO 21940-12) — শুধুমাত্র two-plane balancing যথেষ্ট নাও হতে পারে |
| সেন্সরের সংখ্যা | ১টি কম্পন সেন্সর + ১টি লেজার ট্যাকো | ২টি কম্পন সেন্সর + ১টি লেজার ট্যাকো |
| পরিমাপ রান সংখ্যা | ৩টি রান (বেসলাইন + পরীক্ষামূলক + সংশোধন) | ৪টি রান (বেসলাইন + তল-১ পরীক্ষামূলক + তল-২ পরীক্ষামূলক + সংশোধন) |
| ভারসাম্যকরণ সংশোধন সমতল | 1 | 2 |
| সাধারণ সরঞ্জাম | সরু পাখা অভিক্ষেপক, পুলি, এক-পর্যায়ের ডিস্ক | ড্রাম, ড্রাইভশ্যাফট, প্রশস্ত অভিক্ষেপক, বহু-পর্যায়ের রোটর, মোটর রোটর |
| মানদণ্ড উল্লেখ | ISO 21940-11 (এক-তল কঠিন রোটর) | ISO 21940-11 (দুই-তল কঠিন রোটর) |
বুড়ো আঙ্গুলের নিয়ম: যদি একটি পরীক্ষা ওজন সরানোর সময় একটি বেয়ারিং এ পরিমাপ করা রোটর কম্পন অন্য বেয়ারিং এর কম্পনের বিপরীত দিকে পরিবর্তিত হয়, তাহলে আপনার একটি যুগল উপাদান আছে এবং দুটি সমতল প্রয়োজন।
চওড়া রোটরগুলি কেন গতিশীল ভারসাম্য হারায় — এবং এটির খরচ কত
যখন একটি রোটর তৈরি বা মেরামত করা হয়, তখন ভর খুব কমই এর অক্ষ বরাবর প্রতিসমভাবে বিতরণ করা হয়। ক্ষয় একটি ইম্পেলারের এক প্রান্ত অপরটির চেয়ে দ্রুত খায়; ওয়েল্ড মেরামত একটি একক অক্ষীয় স্টেশনে উপাদান যোগ করে; পণ্য তৈরি-আপ একটি ড্রামে অসমভাবে জমা হয়। ফলাফল শুধুমাত্র স্ট্যাটিক ভারসাম্যহীনতা নয় বরং একটি কাপল উপাদান যা একটি দুলানো মুহূর্ত তৈরি করে। শুধুমাত্র দুটি সমতলে একযোগে সংশোধন উভয়ই দূর করে। কারণ কেন্দ্রবিমুখী বল বৃদ্ধি পায় যখন বর্গ ঘূর্ণন গতির, ৫০০ RPM এ একটি বিনম্র যুগল ভারসাম্যহীনতা ৩,০০০ RPM এ একটি ধ্বংসাত্মক শক্তি হয়ে ওঠে।
যুগল উপাদান উপেক্ষা করা মানে উভয় বেয়ারিং প্রতিটি বিপ্লবে উন্নত গতিশীল লোড বহন করে। বেয়ারিং ক্লান্তি জমা হয়, সিল ব্যর্থ হয়, ফাস্টেনার খোলে, এবং কাঠামোগত ফাটল মাউন্টিং পা থেকে বাইরের দিকে ছড়িয়ে পড়ে। অর্থনৈতিক ক্ষতি — বেয়ারিং, সিল, হারানো উৎপাদন, জরুরি শ্রম — সাধারণত সঠিক দুই-সমতল কাজের খরচ অনেক গুণ অতিক্রম করে।
কম্পন অর্ধেক করা কেন বিয়ারিং জীবন বৃদ্ধি করে
দুই-তল ভারসাম্য — ধাপে ধাপে ক্ষেত্র পদ্ধতি
Balanset-1A প্রভাব-সহগ পদ্ধতি প্রয়োগ করে। দুটি কম্পন সেন্সর এবং একটি লেজার ট্যাকো রোটরকে সম্পূর্ণভাবে চিহ্নিত করে এবং একটি একক অন-সাইট সেশনে উভয় সংশোধন সমতলের জন্য সমাধান করে:
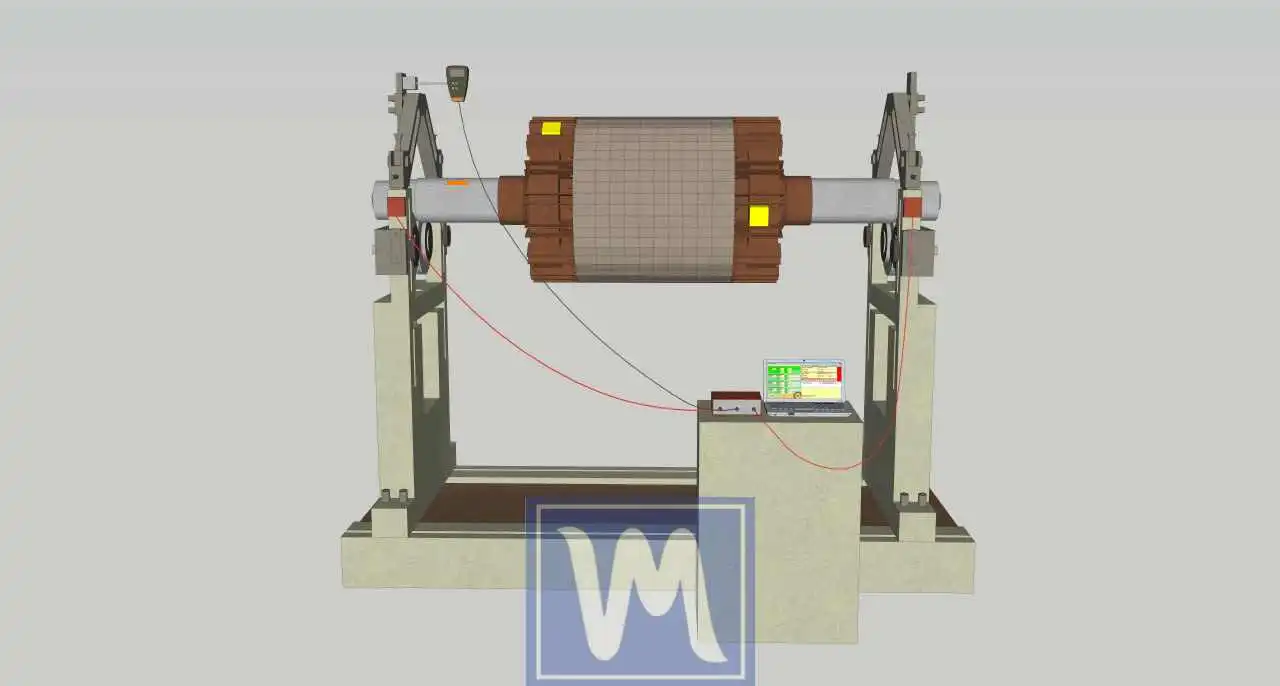
- সেন্সর মাউন্ট করুন। প্রতিটি বেয়ারিং হাউজিং এ একটি কম্পন ত্বরণমাপক ঠিক করুন (সমতল 1 এবং 2) এবং শ্যাফ্টে একটি প্রতিফলক স্ট্রিপে লেজার ট্যাকোমিটার লক্ষ্য করুন। কোনও বিচ্ছিন্নতা প্রয়োজন নেই — রোটর পুরো পদ্ধতি জুড়ে সাধারণ অপারেটিং অবস্থার অধীনে চলে।
- বেসলাইন পরিমাপ করুন। সম্পূর্ণ অপারেটিং গতিতে একটি রান কম্পন প্রশস্ততা এবং পর্যায় কোণ রেকর্ড করে উভয় বেয়ারিং অবস্থানে একযোগে, শুরু করে 1× RPM ভেক্টর যা উভয় সমতলে প্রাথমিক ভারসাম্যহীনতা অবস্থা সংজ্ঞায়িত করে।
- সমতল 1 এ একটি পরীক্ষা ওজন যোগ করুন। একটি পরিচিত ভর প্রথম সংশোধন সমতলে একটি চিহ্নিত কৌণিক অবস্থানে আটকানো হয়। একটি দ্বিতীয় রান ক্যাপচার করে কীভাবে এই ওজন কম্পন প্রভাবিত করে উভয়ই বেয়ারিং অবস্থান, চারটি প্রভাব সহগের দুটি প্রদান করে।
- পরীক্ষা ওজন সমতল 2 এ সরান। একই ভর দ্বিতীয় সংশোধন সমতলে পুনর্নির্ধারিত হয় এবং অন্য একটি রান উভয় সেন্সরে ক্রস-প্রভাব রেকর্ড করে। ডিভাইসটির এখন 2×2 সিস্টেমের জন্য প্রয়োজনীয় চারটি প্রভাব সহগ রয়েছে।
- ডিভাইসকে গণনা করতে দিন। Balanset-1A দুই-সমতল প্রভাব-সহগ সমীকরণ সমাধান করে এবং প্রতিটি সমতলের জন্য সঠিক সংশোধন ভর এবং কৌণিক অবস্থান একযোগে আউটপুট করে — কোনও ম্যানুয়াল গাণিতিক প্রয়োজন নেই।
- সংশোধন ফিট করুন এবং যাচাই করুন। সংশোধন ওজনগুলি উভয় সমতলে গণনা করা অবস্থানে স্থাপন করা হয়। একটি চূড়ান্ত রান নিশ্চিত করে যে অবশিষ্ট ভারসাম্যহীনতা নির্দিষ্ট G-গ্রেডের জন্য ISO 21940-11 সহনশীলতার মধ্যে রয়েছে, এবং Balanset-1A একটি নথিভুক্ত ভারসাম্য প্রতিবেদন সংরক্ষণ করে।
আমরা দুটি সমতলে যা ভারসাম্য করি
- বিস্তৃত কেন্দ্রাভিমুখী পাখা ইম্পেলার এবং দ্বি-প্রবেশ ব্লোয়ার
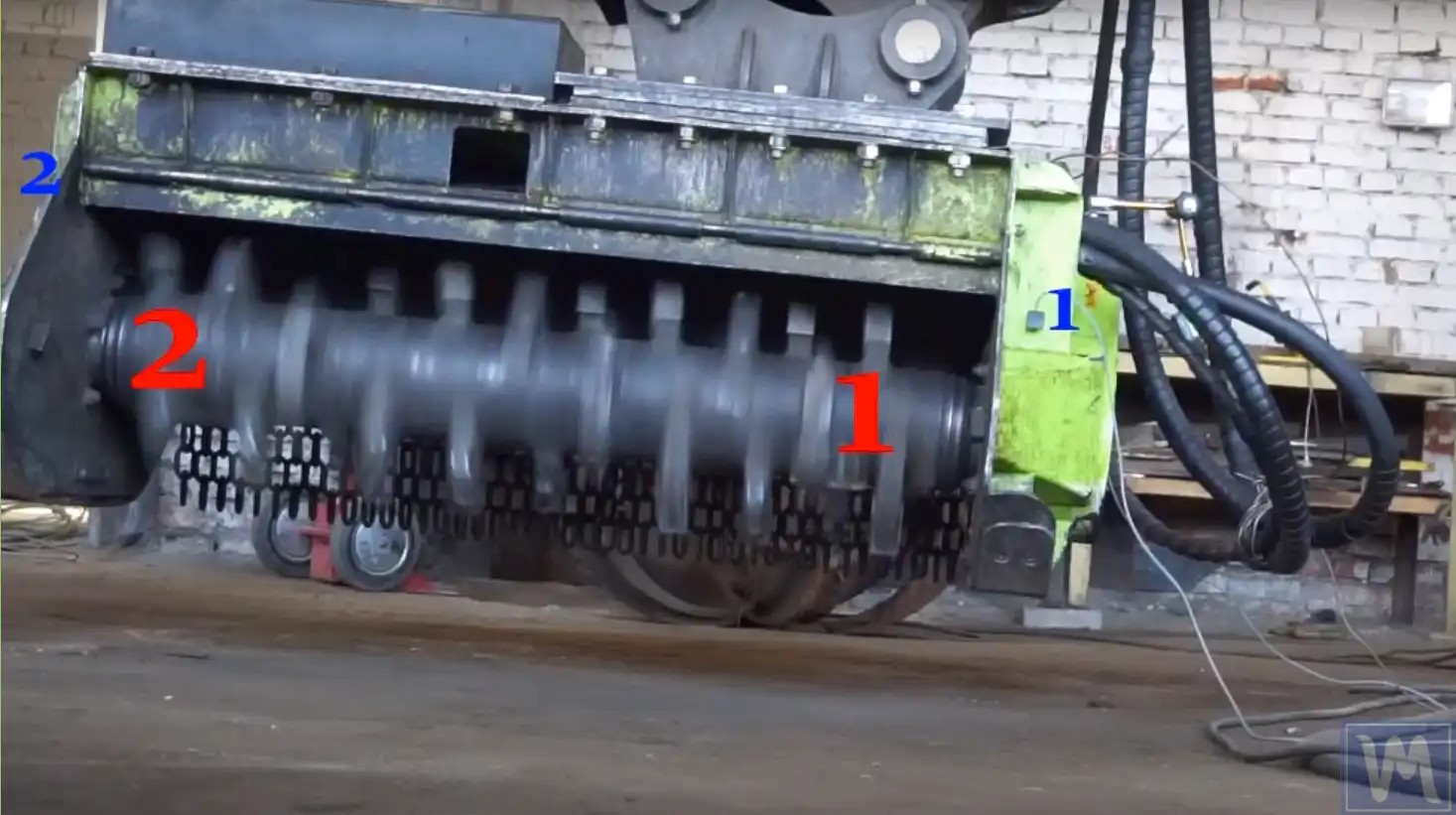
- সমন্বিত হার্ভেস্টার ঝাড়াই এবং কাটার ড্রাম
- ড্রাইভশ্যাফট এবং কার্ডান শ্যাফট
- বহু-স্তর পম্প রোটর এবং কম্প্রেসর ইম্পেলার স্ট্যাক
- কাগজ-মেশিন রোল এবং মুদ্রণ/প্রলেপ সিলিন্ডার
- স্ক্রু কনভেয়র এবং অগার যা ~500 মিমির চেয়ে দীর্ঘ
- মোটর রোটর এবং জেনারেটর রোটর উল্লেখযোগ্য অক্ষীয় দৈর্ঘ্য সহ
- টার্বোচার্জার রোটর এবং বাষ্প-টারবাইন রোটর (ক্ষেত্র কম্পন যাচাইকরণ)
- যেকোনো রোটর যেখানে এক-তল সংশোধন একটি বিয়ারিং এখনও কম্পিত রেখে যায়
সহনশীলতা & মান
ISO 21940-11 (formerly ISO 1940-1) rigid rotors-এর জন্য G0.4 থেকে G4000 balance quality grades সংজ্ঞায়িত করে। rigid rotors-এর জন্য — অর্থাৎ যেগুলো তাদের first critical speed-এর অনেক নিচে operate করে — axial-length-to-diameter ratio আনুমানিক 0.5-এর উপরে হলে সাধারণত two-plane balancing দরকার হয়। critical speed-এর কাছে বা তার উপরে operate করা rotor-কে প্রথমে flexible rotor হিসেবে মূল্যায়ন করতে হবে ISO 21940-12: এতে একাধিক speed-এ এবং দুইটির বেশি plane-এ balancing লাগতে পারে, তাই সাধারণ two-plane rigid-rotor balancing যথেষ্ট নাও হতে পারে। প্রতি plane-এ permissible residual unbalance গণনা করা হয় এভাবে:
Uপ্রতি (g·মিমি) = eপ্রতি × m / 2, যেখানে eপ্রতি = G × 9549 / n (mm/s × rpm → μm eccentricity), m হলো rotor mass in kg, এবং factor 2 tolerance-কে দুই plane-এ সমানভাবে ভাগ করে। লক্ষ্য করুন, equal split হলো bearings-এর কাছে correction planes থাকা আনুমানিক symmetric rotors-এর জন্য একটি practical approximation — এটি কোনো universal ISO allocation rule নয়; asymmetric plane এবং bearing arrangements-এর জন্য ISO 21940-11 tolerance ভিন্নভাবে allocate করে।
পাখা রোটর সাধারণত সন্তুলিত হয় G6.3 বা G2.5 প্রতি ISO 14694; নির্ভুলতা মেশিন-সরঞ্জাম স্পিন্ডেল এবং উচ্চ-গতির টার্বো সরঞ্জাম লক্ষ্য করুন G1.0 অথবা আরও সূক্ষ্ম। আমাদের ব্যবহার করুন অবশিষ্ট ভারসাম্যহীনতা ক্যালকুলেটর আপনার G-গ্রেড, রোটর ভর এবং পরিষেবা গতির জন্য অনুমতিযোগ্য সহনশীলতা খুঁজে পেতে কাজটি শুরু করার আগে।
Balanset-1A — আপনার সম্পূর্ণ ক্ষেত্র-ভারসাম্য কিট
যেকোনো কঠোর রোটরের দ্বি-তল গতিশীল ভারসাম্য — পাখা, ড্রাম, ড্রাইভশ্যাফট, বহু-স্তর পম্প সমাবেশ — এক পোর্টেবল যন্ত্রের সাথে করা হয়: Balanset-1A। এটি একটি দ্বি-চ্যানেল গতিশীল ব্যালেন্সার এবং কম্পন বিশ্লেষক যা রোটর ভারসাম্য করে তাদের নিজস্ব বেয়ারিংয়ে, অপারেটিং গতিতে, প্রভাব-সহগ পদ্ধতি ব্যবহার করে — একটি তলে তিনটি চালনা, দুটি তলে চার। সফটওয়্যার উভয় তলের জন্য সঠিক সংশোধন ভর এবং কোণ গণনা করে এবং একটি প্রতিবেদন সংরক্ষণ করে।

সম্পূর্ণ কিটে কী আছে
€1,975 · সম্পূর্ণ কিট, স্টকে, VAT চালান
- ইন্টারফেস পরিমাপ ইউনিট (USB, 2 চ্যানেল)
- দুটি ভাইব্রেশন অ্যাক্সিলারোমিটার (4 মি ক্যাবল, 10 মি ঐচ্ছিক)
- লেজার ট্যাকোমিটার / অপ্টিক্যাল ফেজ সেন্সর (50–500 মিমি)
- সেন্সরের জন্য চৌম্বকীয় দাঁড়ানো
- ট্রায়াল & সংশোধন ওজনের জন্য ডিজিটাল স্কেল
- Windows ব্যালান্সিং এবং বিশ্লেষণ সফটওয়্যার
- প্লাস্টিক পরিবহন কেস
ফুল কিট
ইউনিট · 2 সেন্সর · লেজার ট্যাকোমিটার · চৌম্বক স্ট্যান্ড · ডিজিটাল স্কেল · সফটওয়্যার · পরিবহন কেস। দ্বি-তল ভারসাম্য শুরু করার জন্য বক্সের বাইরে সবকিছু প্রয়োজন।
OEM সেট
ইউনিট · 2 সেন্সর · লেজার ট্যাকোমিটার · সফটওয়্যার। যারা ইতিমধ্যে একটি স্ট্যান্ড, স্কেল এবং কেস রয়েছে তাদের জন্য, বা যারা ইউনিটটি একটি নিবেদিত ভারসাম্য মেশিনে এমবেড করেন।
| প্যারামিটার | মান |
|---|---|
| পরিমাপ চ্যানেল | 2 (সিঙ্গেল- এবং টু-প্লেন ব্যালান্সিং) |
| ভাইব্রেশন বেগ পরিসীমা | 0.2–80 mm/s RMS |
| ফ্রিকোয়েন্সি পরিসীমা | 5–1000 Hz (≤10% amplitude error above 550 Hz) |
| পরিমাপ নির্ভুলতা | ±5% পূর্ণ স্কেলের |
| পদ্ধতি | 3-রান প্রভাব-সহগুণ (1 বা 2 প্লেন) |
| বিশ্লেষণ | 1× এ প্রশস্ততা এবং ফেজ, FFT স্পেকট্রাম এবং তরঙ্গরূপ, সংরক্ষিত রিপোর্ট |
| ল্যাপটপ | অন্তর্ভুক্ত নয় (Windows PC, অনুরোধের উপর উপলব্ধ) |
বাস্তব দুই-তল ভারসাম্য ক্ষেত্র

সমন্বিত ড্রাম (২-তল)
উভয় সংশোধন তল একটি কৃষি সংমিশ্রণ হার্ভেস্টারে এক ক্ষেত্র অধিবেশনে ভারসাম্যপূর্ণ।
ড্রাইভশ্যাফট (দুই-তল)
প্রতিটি প্রান্ত ফ্ল্যাঞ্জে সংশোধন ওজন সহ একটি দীর্ঘ ড্রাইভশ্যাফটের গতিশীল ভারসাম্য।

প্রশস্ত এক্সহস্টার অভিক্ষেপক
একটি বিস্তৃত শিল্প নিষ্কাশক ইম্পেলারে দ্বি-তল সংশোধন স্থানে ভারসাম্যপূর্ণ।
দ্বি-তল ভারসাম্য — ক্ষেত্র থেকে
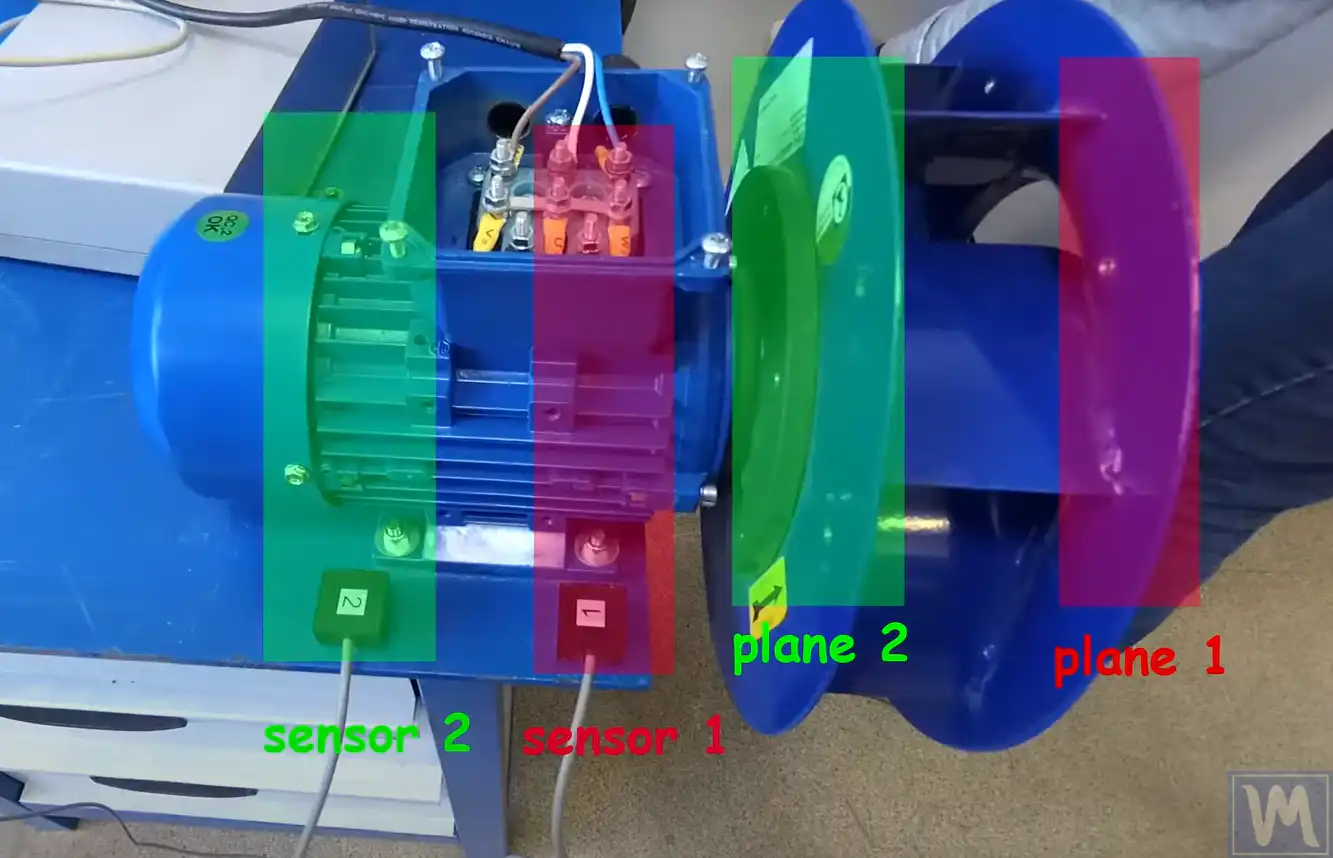
প্রভাব-সহগ সেটআপ
দুটি সেন্সর এবং একটি লেজার ট্যাকো উভয় সংশোধন তল একযোগে চিহ্নিত করার জন্য অবস্থান করা।
স্থানে সমন্বিত
রোটর তার নিজস্ব বেয়ারিংয়ে থাকে এবং কর্মক্ষম গতিতে সংশোধিত হয় — কোন অপসারণের প্রয়োজন নেই।
উভয় সমতল সমাধান করা হয়েছে
সংশোধন ভর এবং কোণ সমতল 1 এবং সমতল 2 এর জন্য একযোগে এক অধিবেশনে গণনা করা হয়।
যাচাইকৃত ফলাফল
চূড়ান্ত চালনা উভয় সমতলে ISO 21940-11 সহনশীলতার মধ্যে অবশিষ্ট অসন্তুলন নিশ্চিত করে।
দ্বি-তল ভারসাম্যের জন্য বিনামূল্যে ক্যালকুলেটর
দ্বি-সমতল ভারসাম্যকরণ FAQ
একক-তল ভারসাম্য যথেষ্ট কখন?
দুটি তলের জন্য প্রভাব-গুণাঙ্ক পদ্ধতি কীভাবে কাজ করে?
একটি দ্বি-তল কাজের জন্য কতগুলি পরিমাপ রান প্রয়োজন?
আমি কি মেশিন থেকে রোটর অপসারণ করতে হবে?
আমার রোটরের জন্য আমার কোন ভারসাম্য গুণমান গ্রেড লক্ষ্য করা উচিত?
আমাদের রক্ষণাবেক্ষণ দল কি Balanset-1A দিয়ে দ্বি-তল ভারসাম্য করতে পারে?
তত্ত্ব শিখুন
উভয় তল একটি পরিদর্শনে সমাধান করুন — কর্মক্ষমতা গতিতে, কোনও অপসারণ নেই
Balanset-1A আপনাকে সম্পূর্ণ দুই-প্লেন প্রভাব-সহগ পদ্ধতিতে গাইড করে: বেসলাইন, প্লেন ১ ট্রায়াল, প্লেন ২ ট্রায়াল, সংশোধন এবং যাচাইকরণ — সবকিছু চলমান গতিতে, রোটরের নিজস্ব বিয়ারিংয়ে। ISO 21940-11, ISO 14694 এবং API 610 অনুযায়ী নথিভুক্ত অবশিষ্ট ভারসাম্যহীনতা। শিপমেন্টের জন্য প্রস্তুত।