Dynamisk balansering (toplansbalansering) forklart







1. Definisjon: Hva er dynamisk balansering?
Dynamisk balansering er en metode for å korrigere ubalanse i en rotor ved å foreta massekorreksjoner i et minimum av to separate fly langs hele sin lengde. Den brukes når korreksjon i ett plan ikke er nok, fordi rotoren kan kombinere statisk (kraft) ubalanse og momentubalanse.
2. Statisk vs. dynamisk ubalanse: Den viktigste forskjellen
For å forstå dynamisk balansering er det viktig å skille mellom de to hovedformene for ubalanse.
- Statisk ubalanse: er rotorens massesenter forskjøvet fra rotasjonsaksen. Det oppfører seg som et enkelt “tungt punkt” og kan korrigeres med én vekt i ett plan.statisk balansering, også kalt balansering i ett plan).
- Dynamisk ubalanse: ubalansen er fordelt langs rotoren slik at korreksjon i ett plan ikke er nok. Denne tilstanden oppdages i rotasjonen og krever korreksjoner i to forskjellige plan. Dette skjer når en rotor har to like tunge punkter i hver sin ende, plassert 180° fra hverandre. Denne tilstanden er statisk balansert (den ruller ikke mot et tungt punkt når den er i ro), men når den roterer, skaper de to tunge punktene en dreiekraft, eller "par", som får rotoren til å vingle fra ende til ende. Ubalanse i paret kan *kun* oppdages når rotoren roterer, og kan *kun* korrigeres ved å plassere vekter i to forskjellige plan for å skape et motsatt par.
3. Korreksjonsplaner og sensorplassering
To-plans balansering bygger på tre ting:
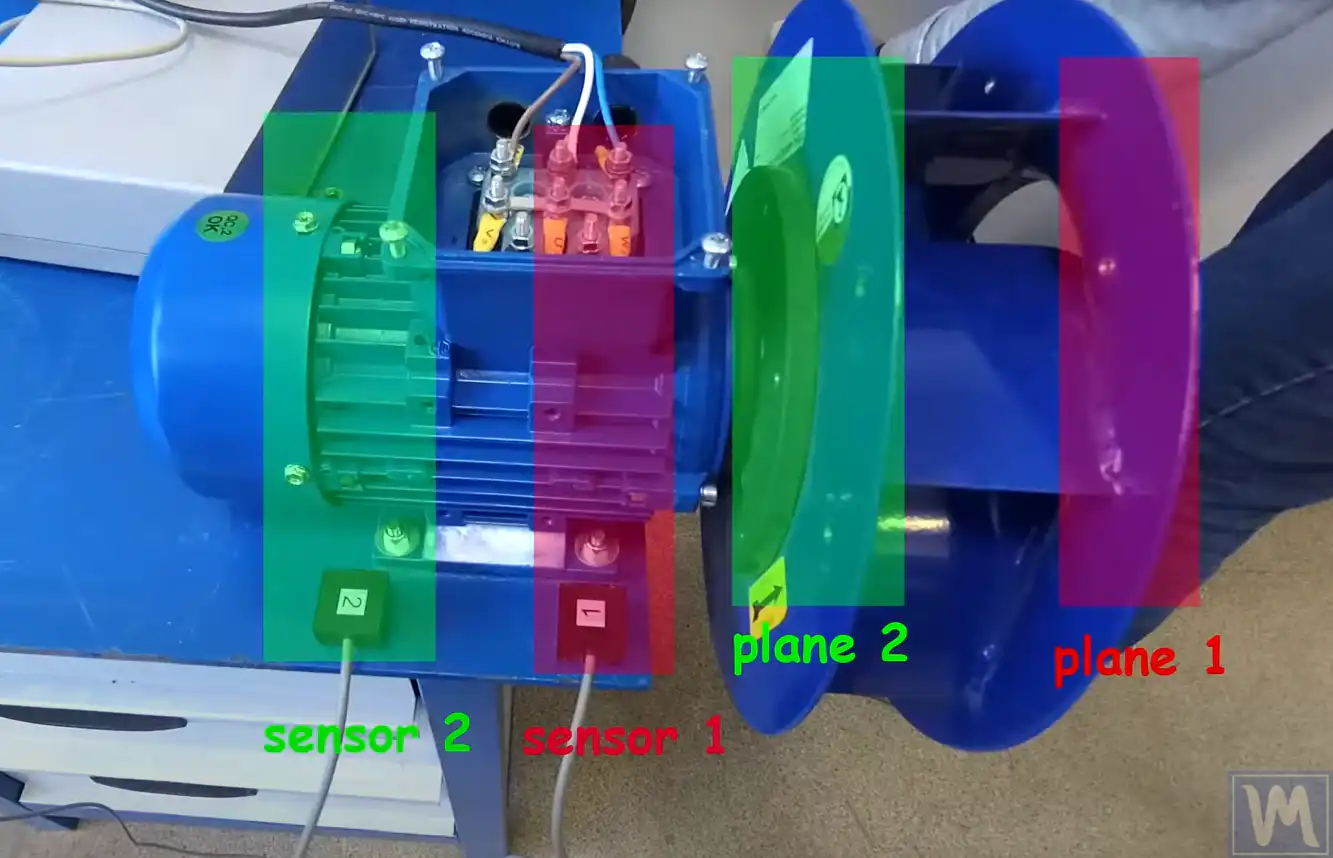
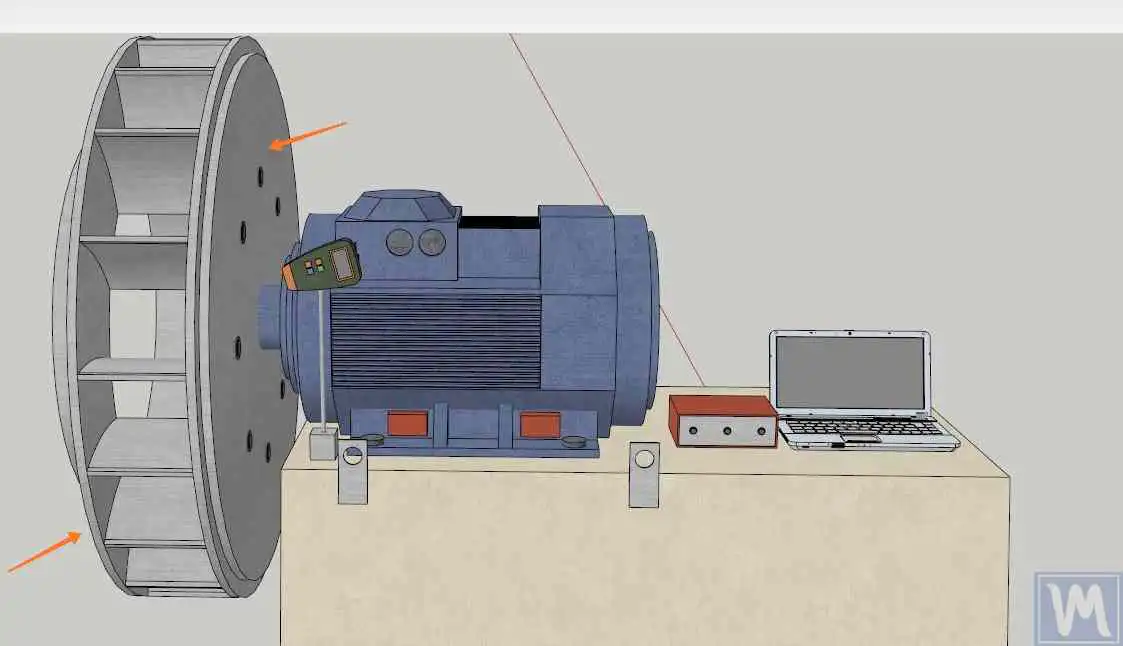
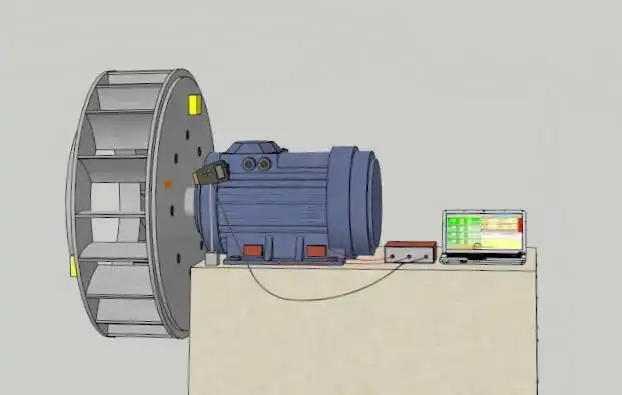
- To korreksjonsplaner (plan 1 og plan 2) der korreksjonsvektene skal installeres.
- To målepunkter for vibrasjon (vanligvis i nærheten av lagerhus) som er koblet til to kanaler.
- A fase referanse (turteller + reflekterende merke) for å måle hastighet og fase.
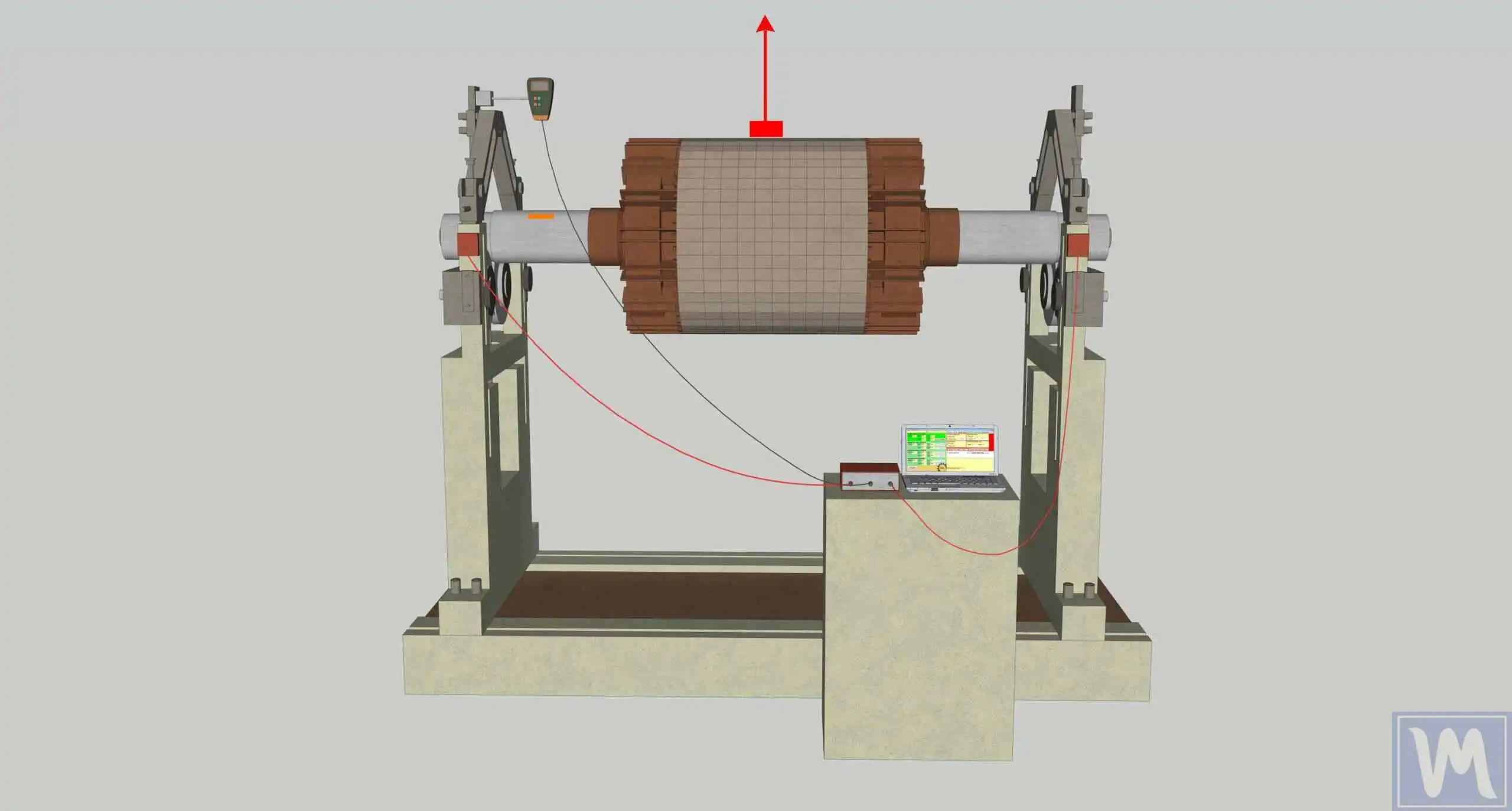
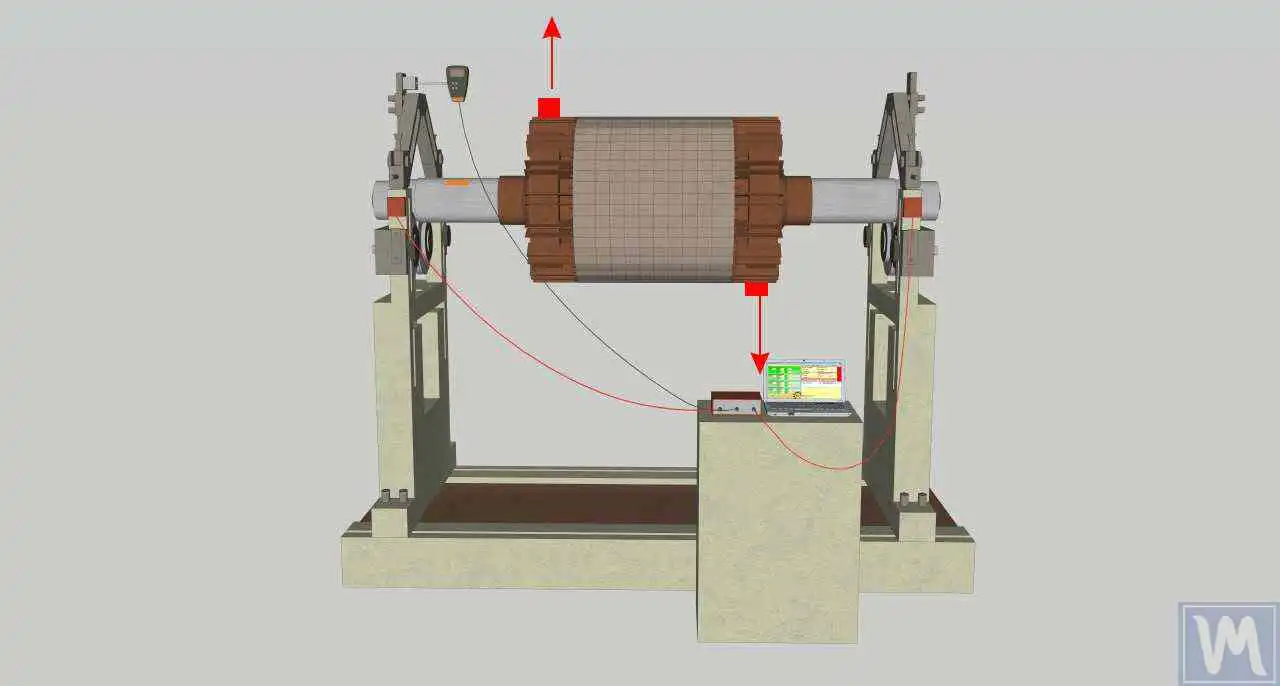
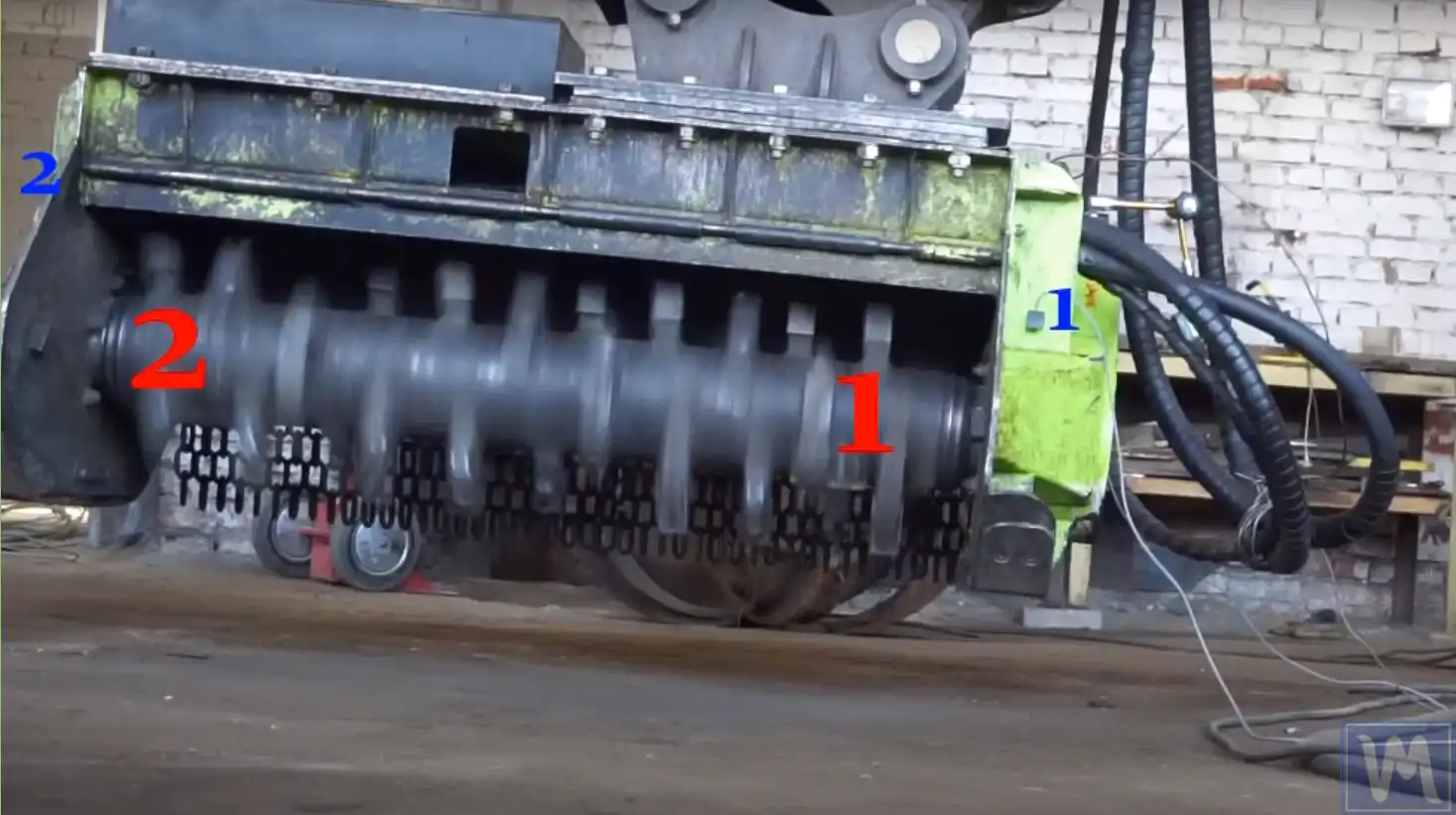
Nedenfor vises typiske eksempler på korreksjonsplan og sensorplassering for vanlige rotorkonfigurasjoner.
4. Prosedyren for balansering av to plan
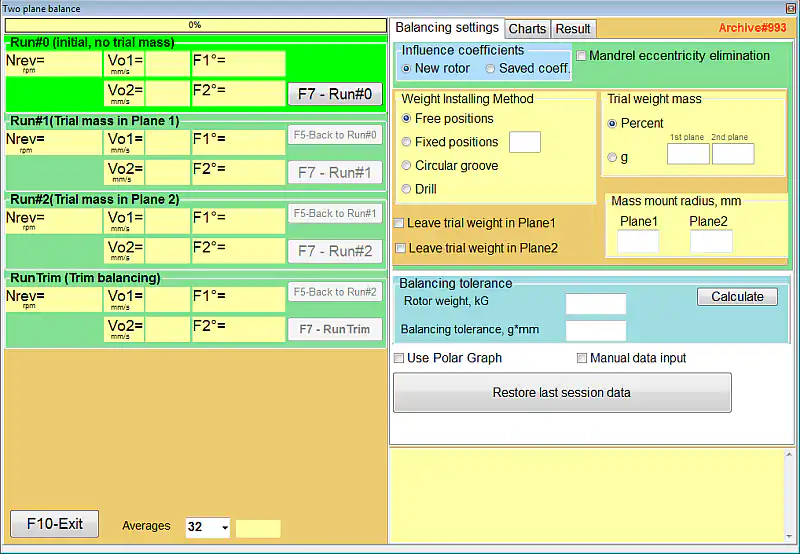
I praksis utføres to-plan-balansering vanligvis ved hjelp av påvirkningskoeffisientmetoden. Den vanlige rekkefølgen er:
- Kjør #0: måle en grunnlinjevibrasjon (amplitude og fase) uten prøvevekter.
- Kjør #1: installere en prøvevekt I plan 1 måler du vibrasjonen på nytt.
- Kjør #2: flytt prøvevekten til plan 2, og mål vibrasjonen på nytt.
- Beregning: beregner programvaren korreksjonsvekter for plan 1 og plan 2.
- Korrigering og verifisering: fjern prøvevekten, sett inn korreksjonsvekter og gjennomfør en verifiseringskjøring (trimløp) for å bekrefte resultatet.
Når en beregnet korreksjonsvinkel ligger mellom to tilgjengelige festepunkter, kan den nødvendige vekten fordeles på de tilgjengelige posisjonene ved hjelp av en Kalkulator for nedbrytning av korreksjonsmasse i to plan, og den underliggende følsomheten i ett plan kan kontrolleres ved hjelp av en Kalkulator for innflytelseskoeffisient.
5. Balansering i to plan med Balanset-1A
Balanset-1A er et PC-basert balanseringssystem med to kanaler som er utviklet for rotorbalansering i ett og to plan under feltforhold og i produksjonsmiljøer. I toplansmodus måler Balanset-1A rotorhastigheten og vektoren til 1x vibrasjon (RMS og fase) på to kanaler og beregner korreksjonsvektparametere for begge plan.
Fordi Balanset-1A brukes direkte på den installerte maskinen, utfører den balansering under reelle driftsforhold — inkludert innretting, forspenning av lagre og fundamentpåvirkninger — og rapporterer de oppnådde gjenværende ubalanse i forhold til den valgte toleransen, som kan kryssjekkes med en restubalansekalkulator (ISO 21940-11).
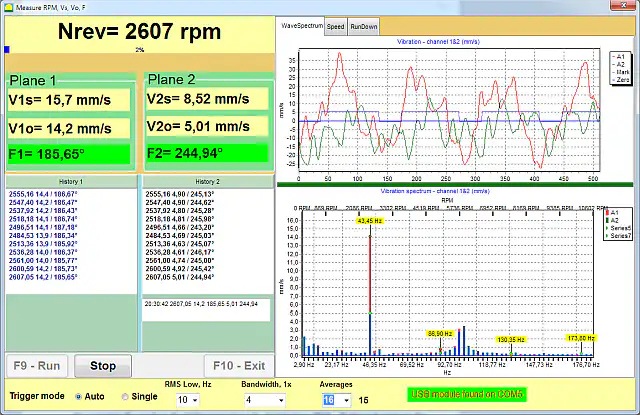
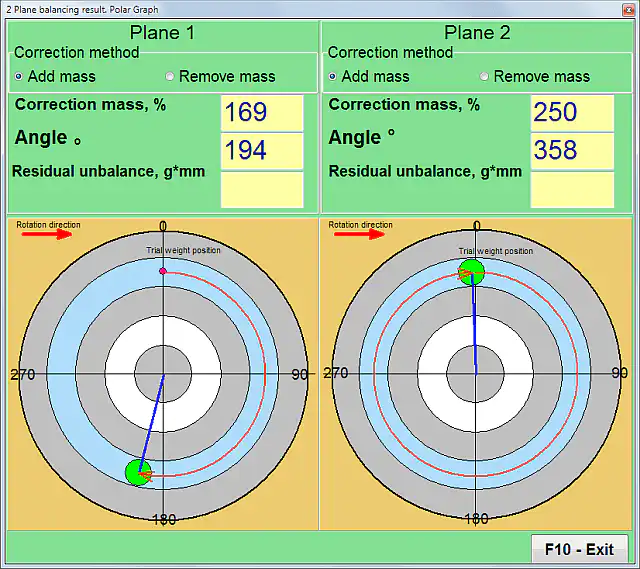
5.1 Programvare: oppsett av dynamisk balansering og resultatvisning
5.2 Vibrometermodus (hurtigkontroll før balansering)
Før og under balanseringen, Vibrometer Denne modusen kan brukes til å overvåke vibrasjoner og bekrefte at driftsforholdene er stabile under målingene.